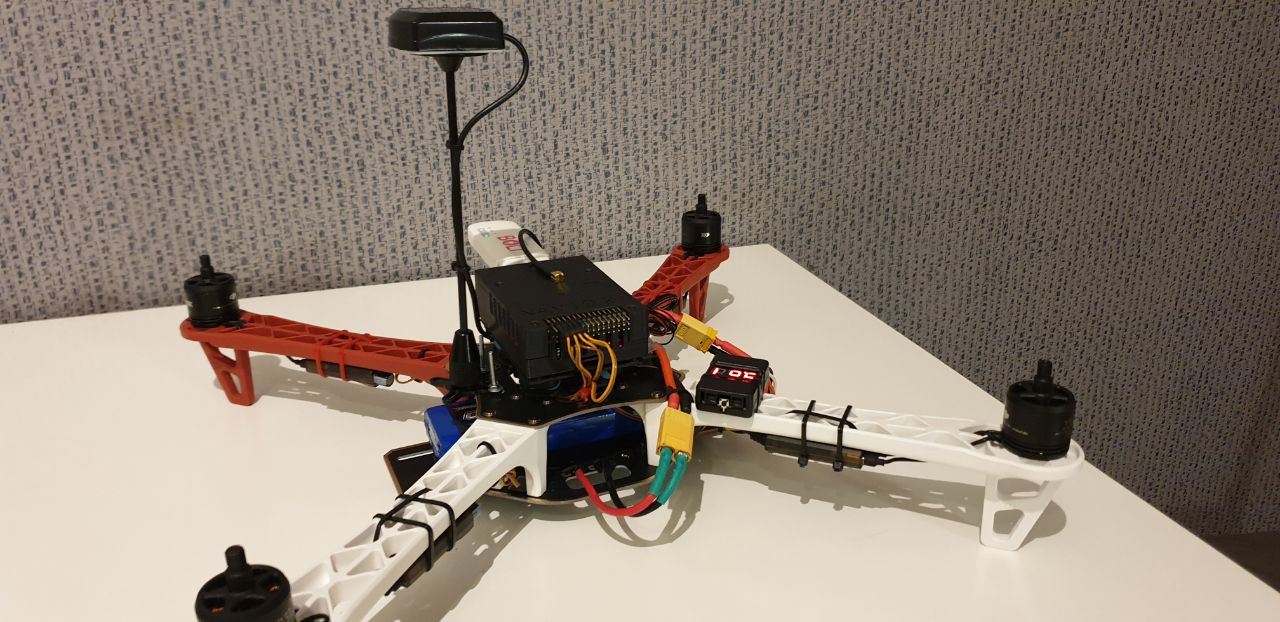
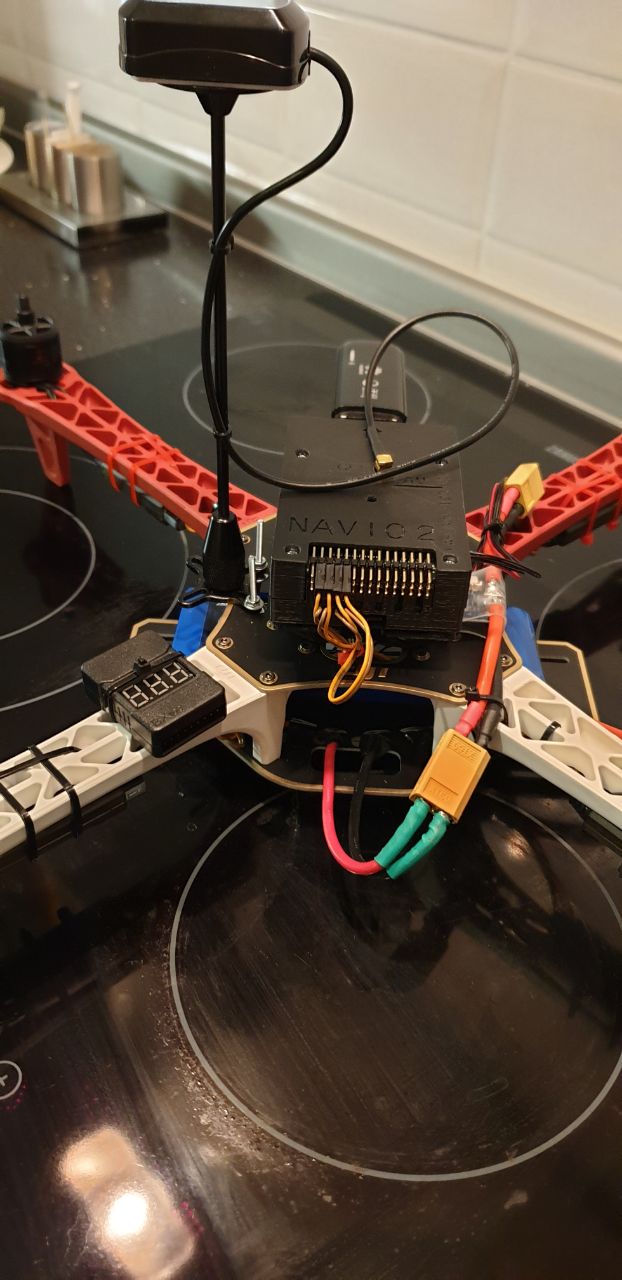
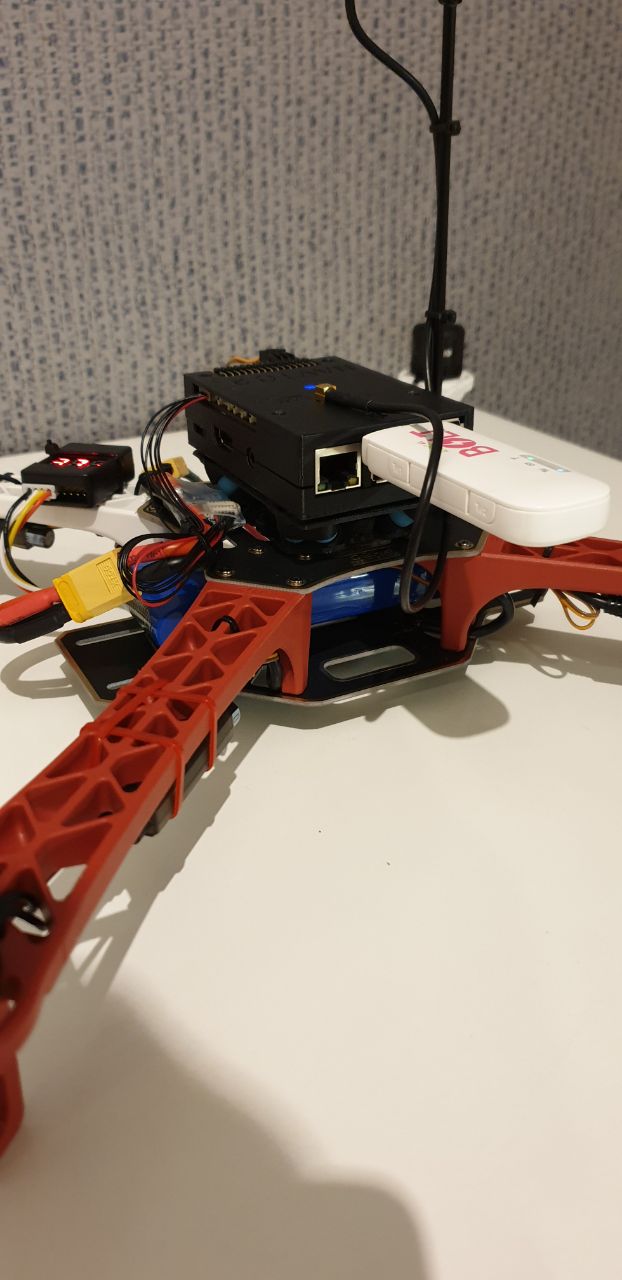
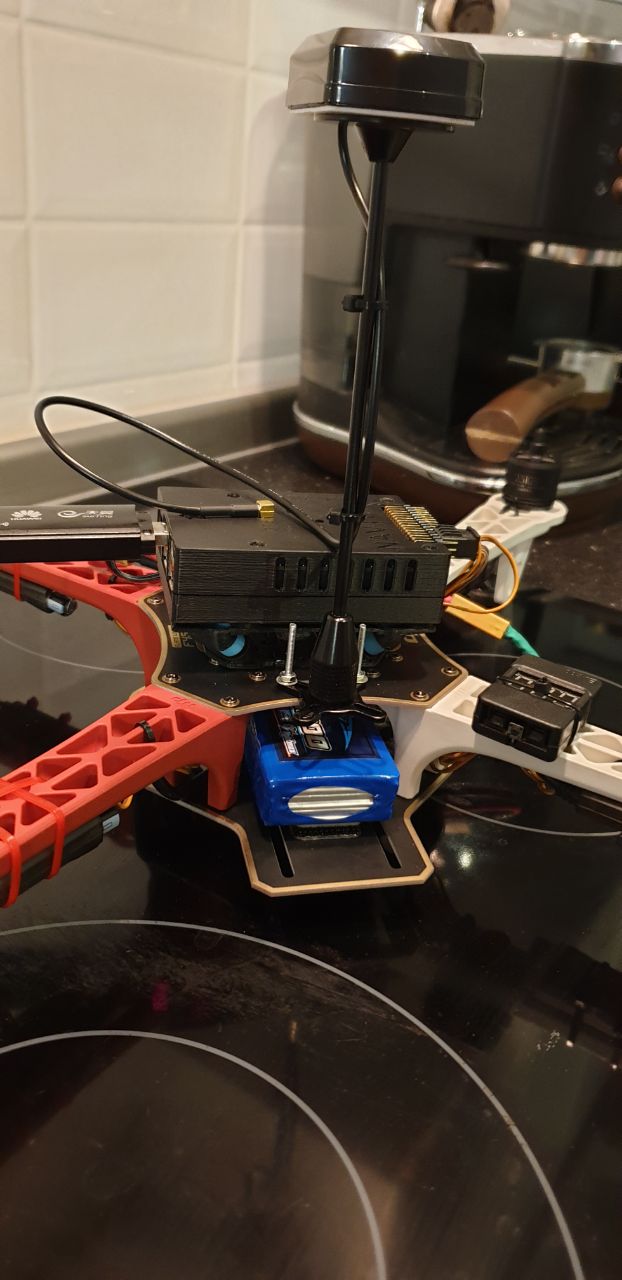
I’m building my 1st drone ever with Navio2 that is supposed to be flying completely pre-programmed waypoint missions. All telemerty and control should be done over 3G/LTE. Waiting for Logitech joystick to arrive. Will add Raspberry Pi V2 camera and gstreamer as soon as I’m able to get it to fly.
Still did not get it to arm. Working thru PreArm errors…
Any input like ideas, hints, params for this type of buiild are VERY welcomed!