I’m having difficulty getting any kind of connection between base and rover.
Here’s my setup:
- both units connected to home network (192.168.2.141 and 192.168.2.228)
- both units using reach_image 1.2 and latest (0.2.2) Reach View version
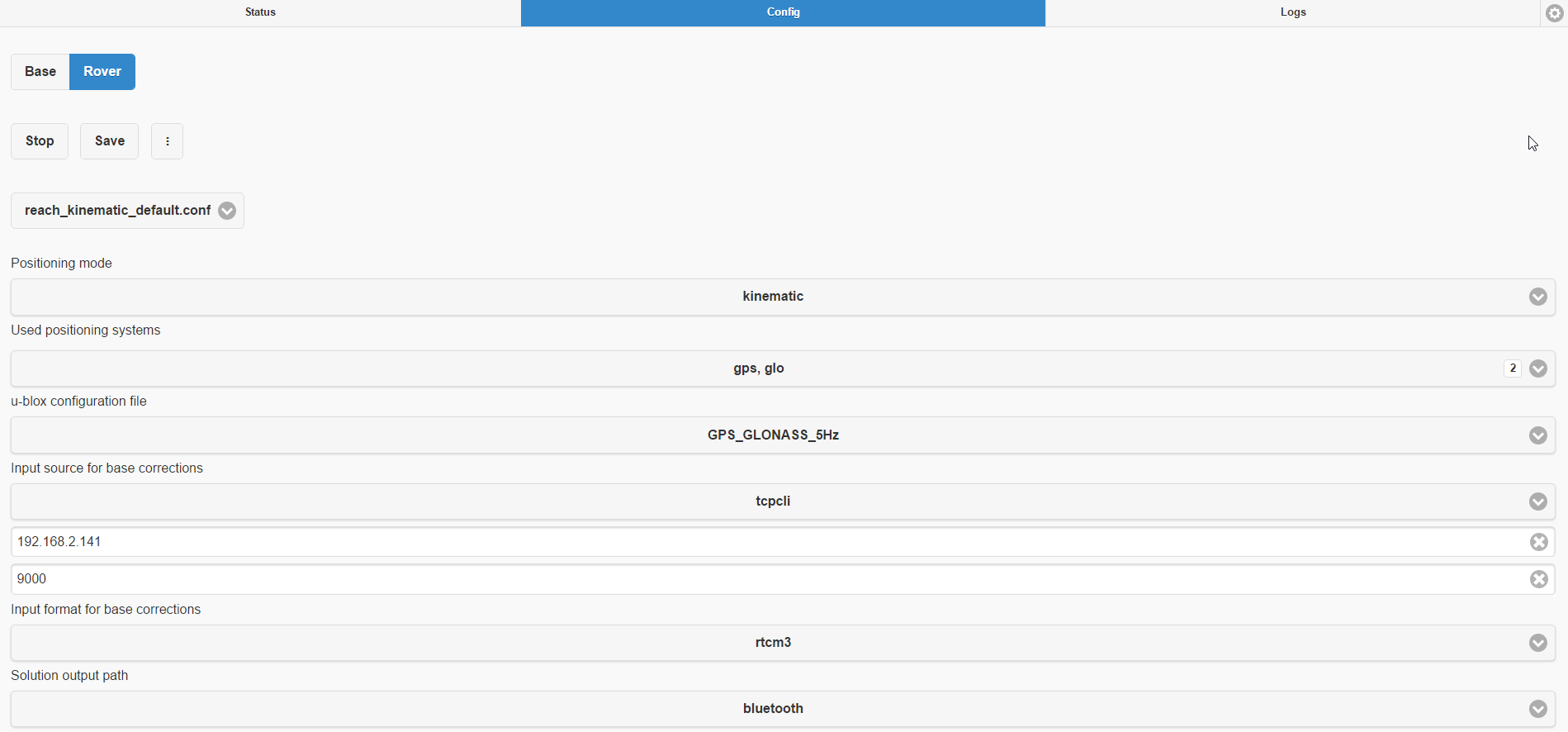
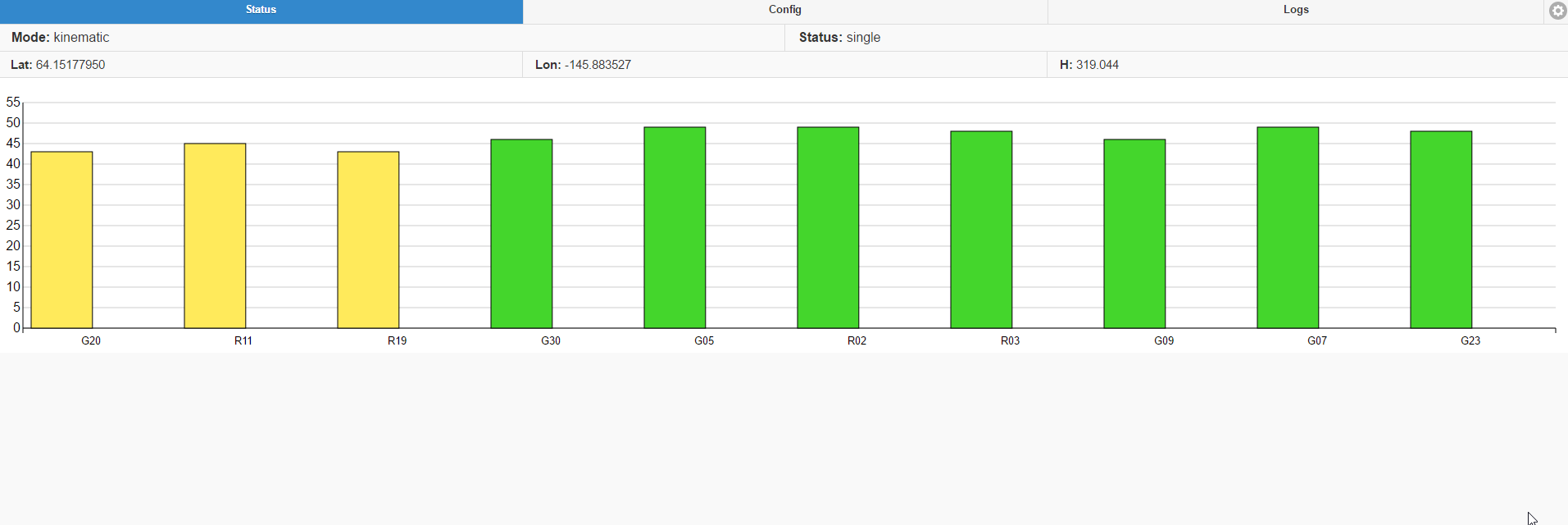
- Both units get a decent number of “green” satellites in single mode - I switched the setiing “u-blox configuration file” to be “GPS_GLONASS_5Hz” to get this, since “GPS_10Hz” didn’t get me as many. However - lest you think this is the problem, I was unable to connect rover > base with this config either…
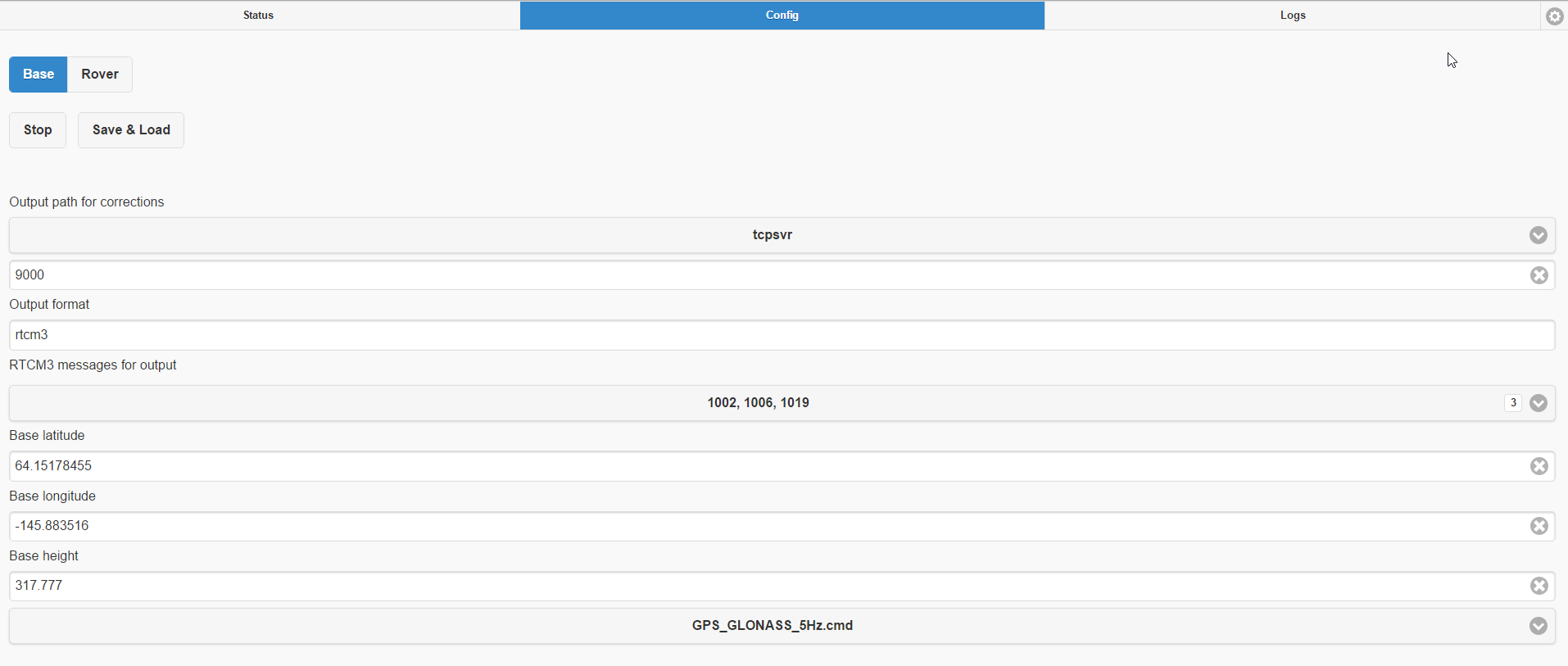
- I have the base set to “GPS_GLONASS_5Hz.cmd” since I figure this should match the u-blox setting for the rover…
- I do have the “tcpcli” address and port correct for the base
- I have checked with telnet that there is broadcast traffic from the base ip at that port and yes there is - no nothing in my network appears to block it…
- I’ve tried “static” and “kinematic” modes for rover (since it is sitting on a stool on the front lawn after all…) but neither helps.
- I have tried swapping rover for base functions between the units but that doesn’t help
Things that do work: I can get NMEA output from a single unit over bluetooth to android (great feature!), and LLH to RTKPLOT as well.
However - I don’t get the color beside grey bar view showing rover/base signal strength ever, and the rover says “single”
It would be nice to be able to get some feedback from somewhere in the program to know what the problem is… Maybe it is something really simple!
Anyway if anyone has any help I’d love to hear it!
thanks
Jon