We did some basic ground tests yesterday and got some very good results.
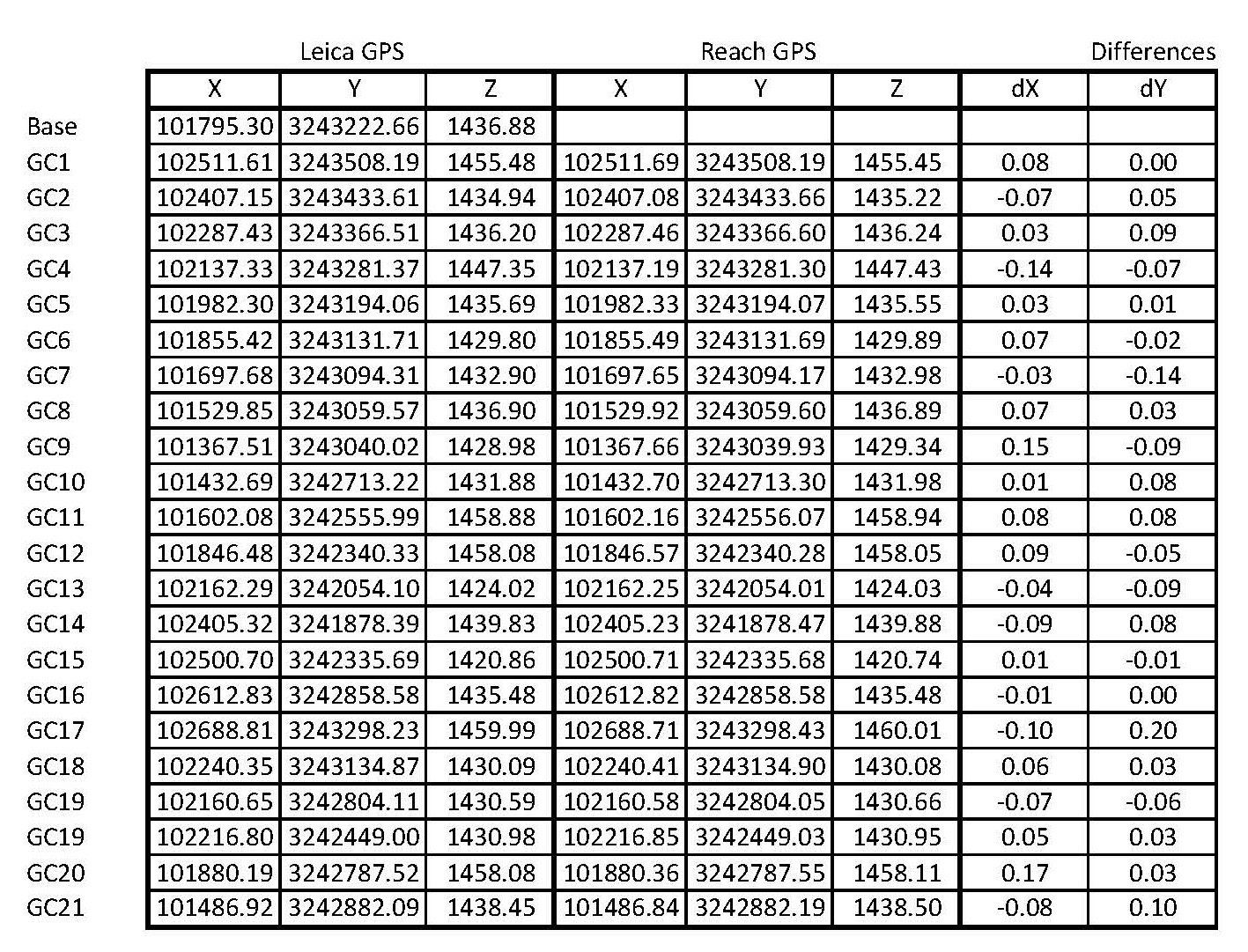
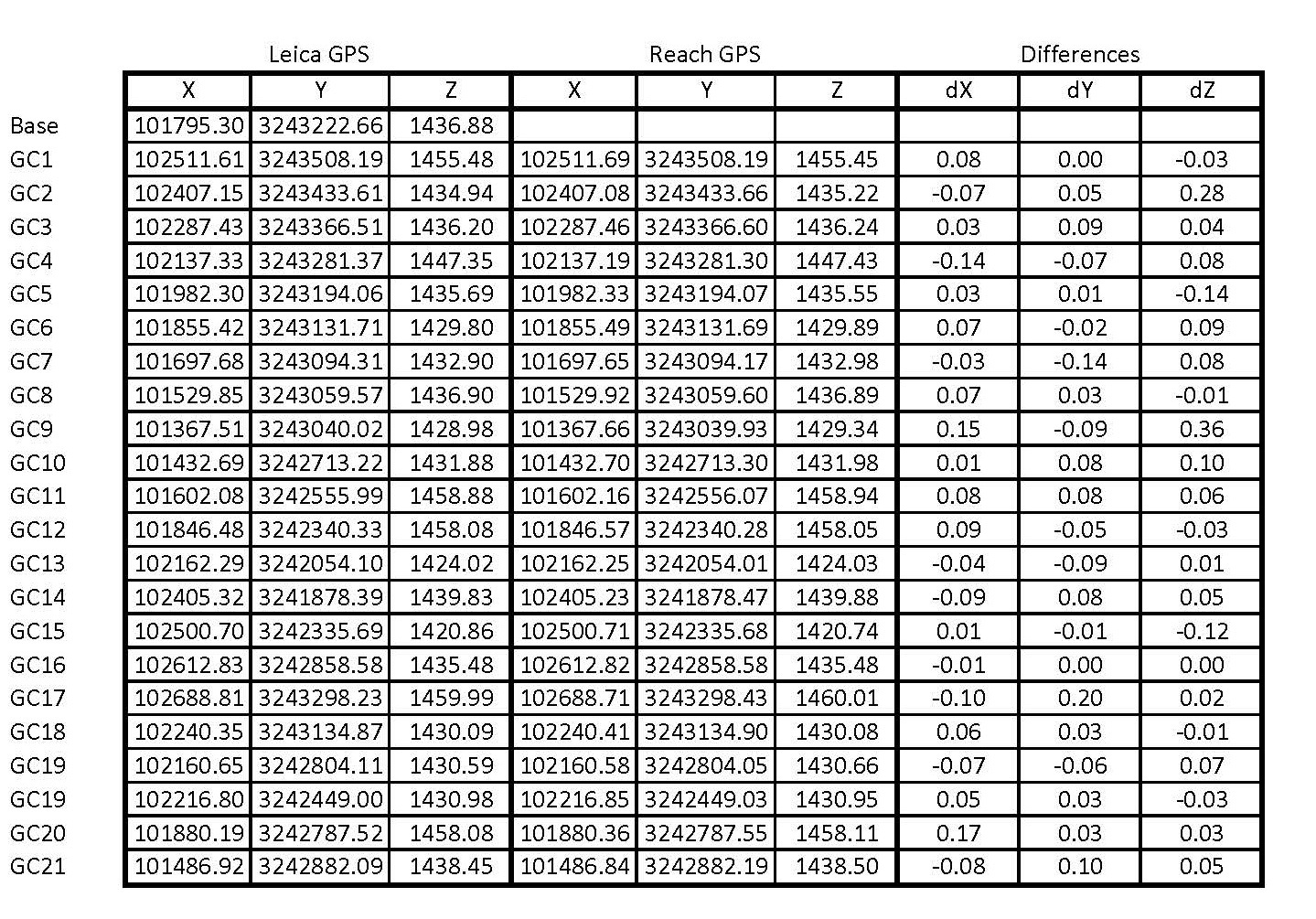
Basically we placed over 20 control markers over a site 2km by 5km. We surveyed these points with a Leica GPS1200 survey grade instrument. The initial measurement was to our local NTRIP basestation for a good relative coordinate to base our survey on and then applied that shift for our RTK base. This is a tried and proven methodology that we have been using for some 10 years now. The coordinate quality for all points did not exceed 3cm in all axes.
Then we setup the Reach system and followed the same protocol. Since we blew one of the DF connectors earlier on( having swapped the power leads previously, we are not able to connect to this port) we can only do post processing and not RTK work for now.
The differences we noticed from the Leica coordinates varied about 5cm. This is perfectly fine for certain types of work. We also measured the same points again from the same station with the Leica GPS as well as the Reach after 8 hours to get a new satellite constellation. What was interesting is that the Leica gave exactly the same coordinates as before. The Reach coordinates were relatively the same but had shifted to the NE by 2cm and up by 6cm consistently.
All in all, we are happy with the small, low cost system and suits certain types of survey just perfectly.
Thank you so much for sharing this! Have you used antennas from the kit? Can you also share your measurement data (logs, graphs, screenshots)?
Can you also send me a private message about what was burned/broken in you second Reach? We will try to find a way to make it work for you or help with replacement.
I will give a full report early next week. I am currently doing a survey in rural Lesotho and will take some time out to document my methodology.
I used VRS via NTRIP so my base line was only a few meters. We have had fixes with single base station NTRIP from 15km away but they are not consistent and drift over time by over 30cm. The heights were terrible. VRS (when we are in range and do not need to extrapolate past the network grid) works incredibly well for us.
Setup Leica base, connect to NTRIP server. Given the site was outside of the VRS and too far from a single NTRIP base, a rough coordinate was recorded to base the survey on. (Not important, just for my own interest)
Surveyed using RTK points using Leica GPS.
Setup Reach base over same Leica position as before. Set to record data.
Surveyed each points as before, static observations, each point for 60 seconds.
Waited 7 hours then re-measured with Reach same points.
In the office:
Post processed each point individually using RTKLib
Compared Leica to RTKLib
Noticed very little shift over time between Reach measurements.
Noticed OK comparison between Leica and Reach but needs long occupation time (over 60 seconds), very susceptible to multipath and the base / rover need to be perfectly still.
Not necessarily. Like all GPS receivers, they work on averaging coordinates. Even the very expensive ones with special choke antennas. So simply, the longer you observe, the more data you are collecting to make a more accurate fix. Since Reach is only L1, there are a good few signals that it is “missing” that can be compensated for by longer observation instances. L1 only is just susceptible to multipath and long baselines. So if your rover is in the sky above multipath effects, you should be ok.
What we are trying to do with static observations is to give the same coordinate every time for that point. Over time, L1 will drift and this needs to be averaged. For spot instances that dont require long term fixes such as drone navigation, Reach will work well, but for terrestrial work and getting the best that you can out of these devices, I would suggest long observation windows.
For the price that Reach is, I feel that it is an absolute bargain to get something to determine a coordinate as precise as this, no matter the methodology used. Our first RTK / Post Processing GPS was bought in 2002 and cost then $70 000. It did not come with GLONASS( GPS only) and the internet was only just being born (no NTRIP). This technology treads firmly into the traditional surveyors territory.
Hi, Luke! Thanks for these awesome results!
How long does it take for you to get the best results in precision with the Reach GPS, and what accuracy can you eventually get?
Clear this a bargain compared to the usual price of land-surveying GPS equipments
For moving about 5 miles per hour or 8 kilometers per hour, whichever suits your fancy, what would you say would be the margin of error deviating, I would probably give it a 8cm margin, right and left, so 16cm total for me? What do you think?
Weston. I think thats like asking how long is a piece of string! If you are moving there is an interpolated line between your points. 8km/h is about 2m/s. Reach can do 20hz so its a measurement every 10cm. For each of those measurements, you getting a few centimeter deviation, depending on your processing parameters and what you are looking for. This type of kinematic measurements are not robust enough to have centimeter repeat ability but will be locally just fine.16cm is still a very small deviation for any measurement, but I think you should be getting half of that with good antennas.
Andreas, we did not use a radio for this exercise as we had recently blown a port with a faulty power supply. We post processed the results. The hardware in the photo (by the way, that person in the photo is not me but a field assistant!) is:
5v Battery bank
portable wifi router
Tallysman TW-2410 antenna
Reach
3d printed pole attachment with plumbing bubble and tripod stand
We have run RTK using RFD900 radios. They work very well but pull a fair bit of power so make sure you have at least 2a available on your battery bank
The setup on the tent is the same but has a small ground plane but not a wifi router as it is only a base. We later changed this base position as it was not secure enough.
We are leaving on Sunday for Zanzibar to do a very large bathometric and aerial survey. We are taking our Reach units with as we are very satisfied with their accuracy. Given their small size and simple setup, it is a no brainer!
Nice results, we have problems with the parameters in the reachview app,
and the hardware is the same.
We have a number of known points, been measured by a surveyor in the Dutch X Y Z an olso in LLH
we have a Base - Rover setup, and we see the gray bars from the Base and color bars from the rover,
So far so good, we have everything set as the docs say voor Base and Rover, and fill in the XYZ for the Base location.
6 a 7 seven green bars in the rover reachview. but stil we get no fix.
Result is that that we jump between 3 cm and 260 cm, not good, in comparison to your 6 cm result.
I have also a 3DR Radio v2 build in (not yet activated)
I have several questions,
1, Do you use the ReachView app?
2. can you post al the settings form your settings or maybe put in the base_config file and rover_config file.
This will help me a lot and also others.
It is not so easy, as was suggested in the intoduction movie.