I’m following the instructions for my first attempt at PPK for a survey done with the Reach RS2, and I am trying to work out what to do next. The issue is that I have TWO log files produced by the COR base station - as (due to time zone difference) the surveying in NZ was taking place across 00:00GMT and cell coverage was poor (so could not receive RTK corrections over NTRIP).
Emlid studio doesn’t appear to allow me to import two different correction log files, so how do I combine these? Or is there another workflow for this?
Are the start/stop of the 2 logs continuous ? If so, you can simply just merge them by pasting the obs-data from the last rinex into the first rinex. Remember to change the end date/time.
They should be continuous yes. The data is available as hourly or daily log files.
I will have a go at some copy and pasting… but it would be even better if Emlid Studio could import multiple log files! @svetlana.nikolenko
Hmmm that didn’t seem to work… perhaps my copying and pasting wasn’t correct… but this doesn’t look right.
Attached - 1. What I started with and 2. what I ended up with.
What am I missing here?
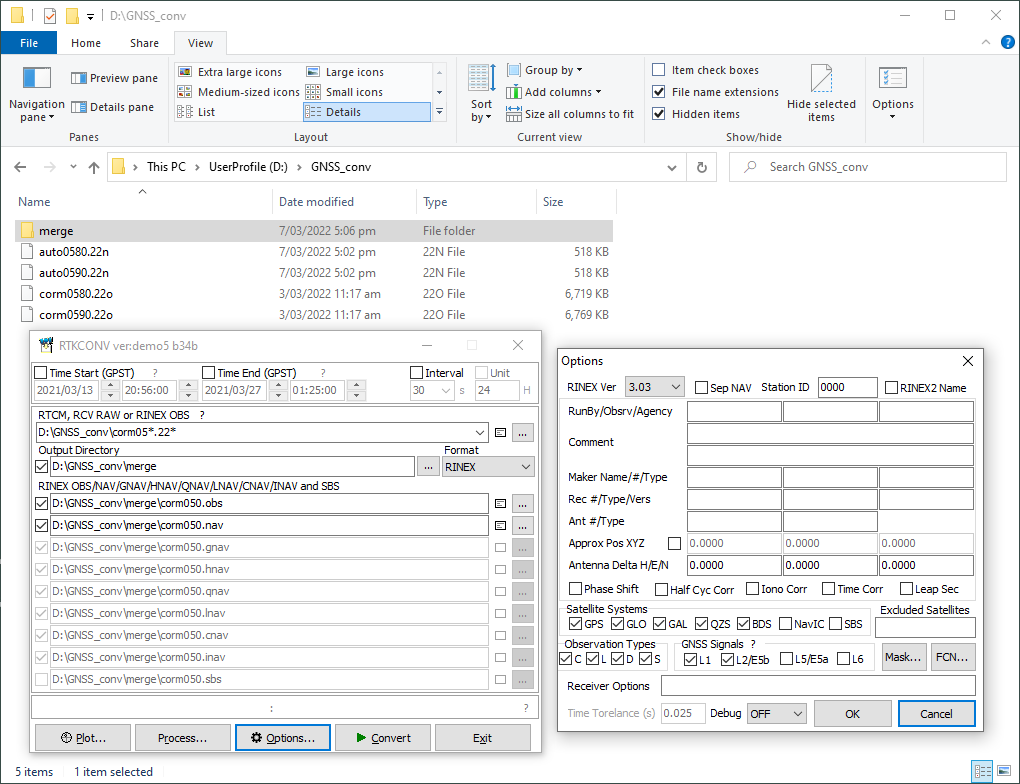
I’m a NZ based RS2 user as well. The most reliable/easiest way I’ve found of merging LINZ CORS data for Emlid Studio is to use RTKCONV. You can use the wildcard “*” to merge multiple rinex files (See the screen shot attached). Your copy/pasting appears to be working to some degree though.
You might have a little more success if you use the *.nav file from your rover instead of your merged file in the Navigation section. LINZ only supplies navigation messages for the GPS constellation so your current solution will only be based on those satellites, however CORM is also tracking Glonass and Galileo, if you use the rover *.nav file the solution should incorporate those constellations as well.
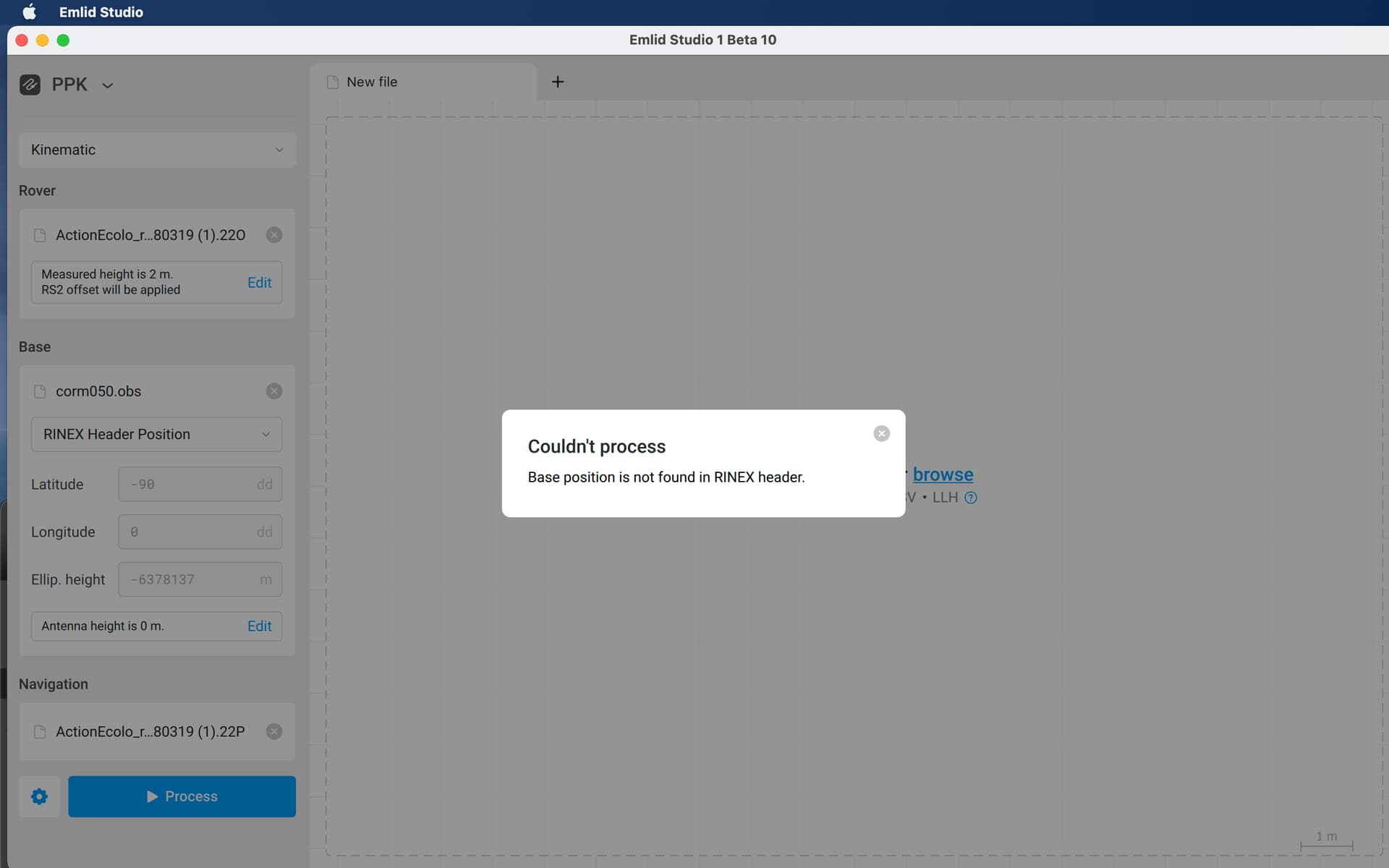
So I managed to get something out of RTKCONV, but when I put it in to Emlid Studio I get the following error: “Couldn’t Process. Base position is not found in RINEX header”.
PS - I don’t have a *.nav file on the RS2 - only UBX & LLH. I gather Emlid Studio automatically makes one from the UBX when you load it, so maybe that avoids an extra step?
Can’t wait to see the outcome, thanks for sharing. I have stayed away from Studio so far with our Yuneec data because the majority of its missions are multi-battery which in turn creates multiple drone logs. CORS base logs are always a continuous hourly file.
…except in the case when you are out in the field taking measurements over a period that passes midnight GMT… then (like in this instance) you have multiple hours or days of CORS correction logs to deal with!
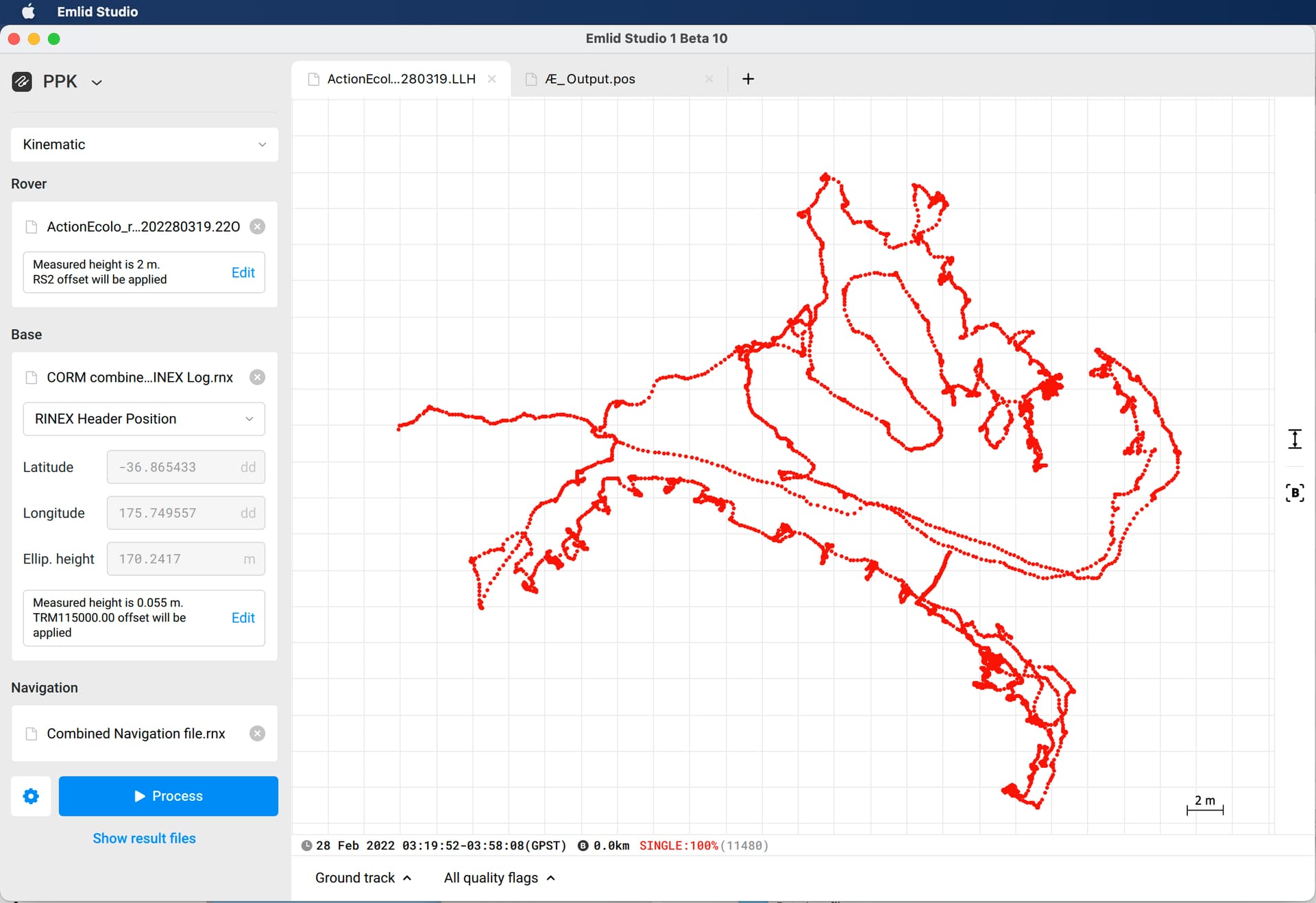
I’ve tried to merge your RINEX too. Please check this one. I still can’t guarantee it will work because it’s too easy to make a mistake here.
To be honest, I’d better post-process base logs separately and merge the .pos files. I know it’s excessive work, but the feature with multiple files post-processing is on the way.
Thanks for that. David Burlace has ben helping me with this and has been fantastic.
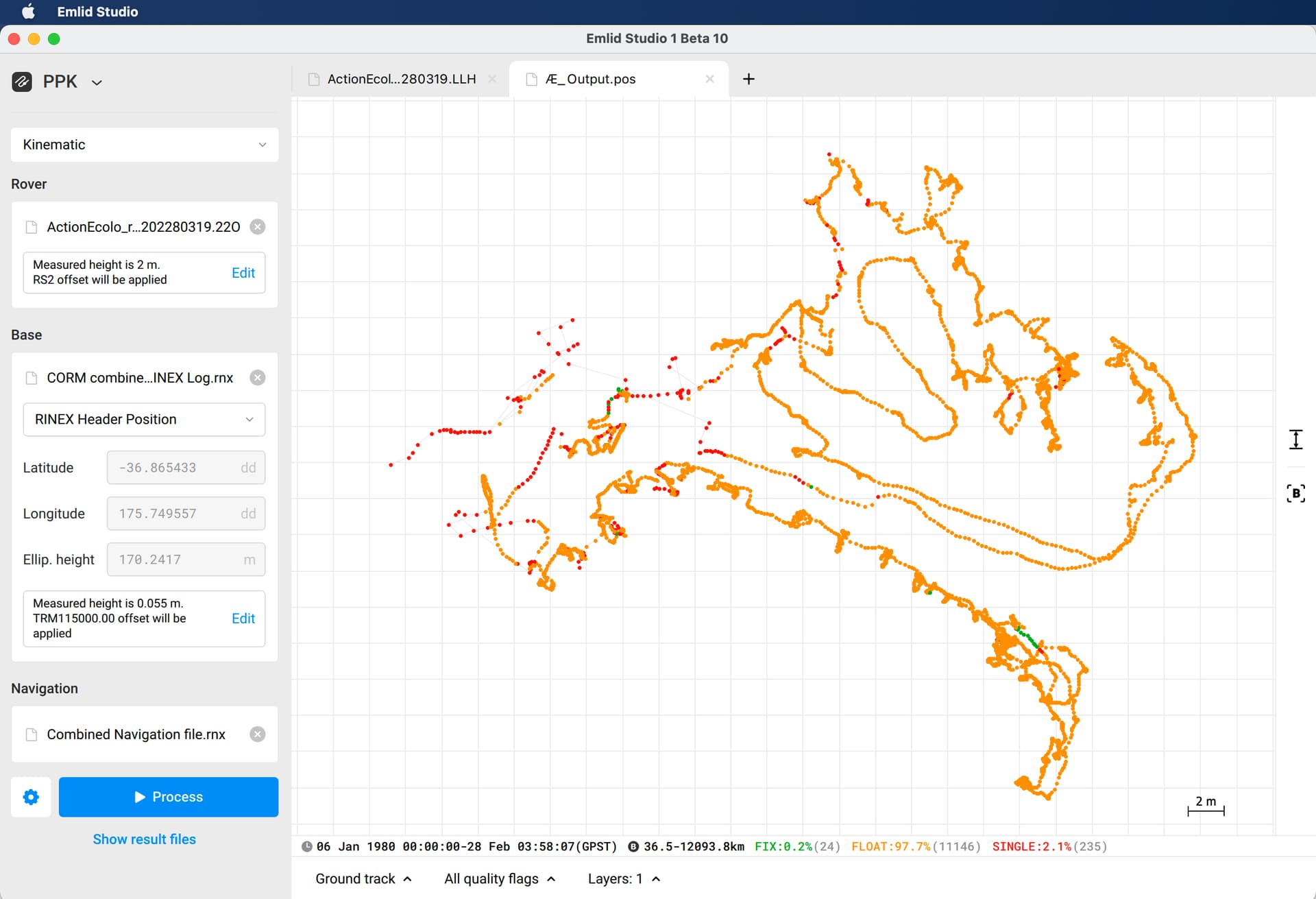
The subsequent issue of getting fix on points is an ongoing issue, but merging the files was quickly solved.






 Don’t miss updates!
Don’t miss updates!