So here we go again. Another nutty project from me. Not sure if its ever gonna fly or come down in one piece.
But one thing is for sure, its going to be one of the cheapest, lightest, advanced and most awesome stuffed airplane in my neigborhood, and world wide of course ![]()
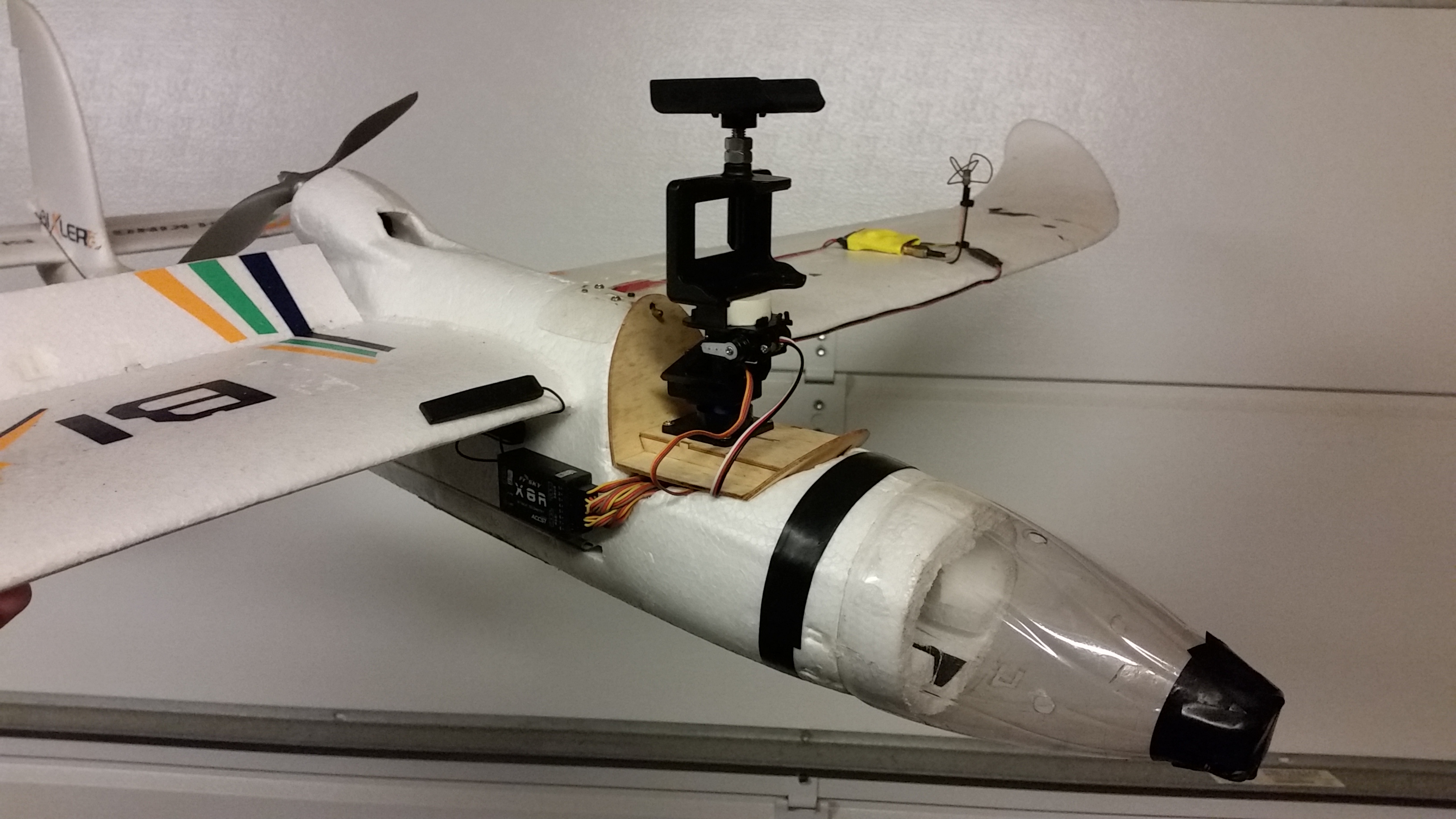
One of my beloved airplane need some TLC… Uhm or retire. It has given hours of airtime with camera rigged so it would barely stay airborn with the throttle at max. Burned a dozen ESC and puffed bunch of the Lipos.
It has the famous bottle facelift. Aerodynamic as hell with optional camera mount in the front.
It was here i started the search for return to home gps, and discovered Reach for the first time and ended up walking in a entirely different way with this hobby. So here i am again, same plane but different mission.
Some nostalgic pictures of the past.


Work log - Intro
I write this as a log, posting updates as i progress or crash&burn.
Here are som facts and info about my project:
- RO1 qualified. Meaning its max 2,5kg ( MTOM=MaxTakeOfMass) and some other limitations.
- Cheap. I crash alot so i cant afford expensive stuff wrecked every other day. Some of the gear may survive, like the controller, hopefully the camera and RTK stuff. But, who knows.
- Cheap, light weight and quality doesnt always go hand in hand, so keeping it under 2,5 kg is a must. I think i need to lower the quality on the camera &lense for this to work. I may swap this for better stuff as time goes.
- Its a fixed wing frame i am going for. Those quads gain to much weight just to stay airborn. Anybody can get a bunch of gear flying, but keeping it below 2,5 kg and with all these features is hard. Winged aircraft has so much more capacity and need less engine to fly.
- If it wasnt clear, i am aiming for 3D aerial mapping. and as accurate as it can be with GNSS gear fitted for PPK to work.
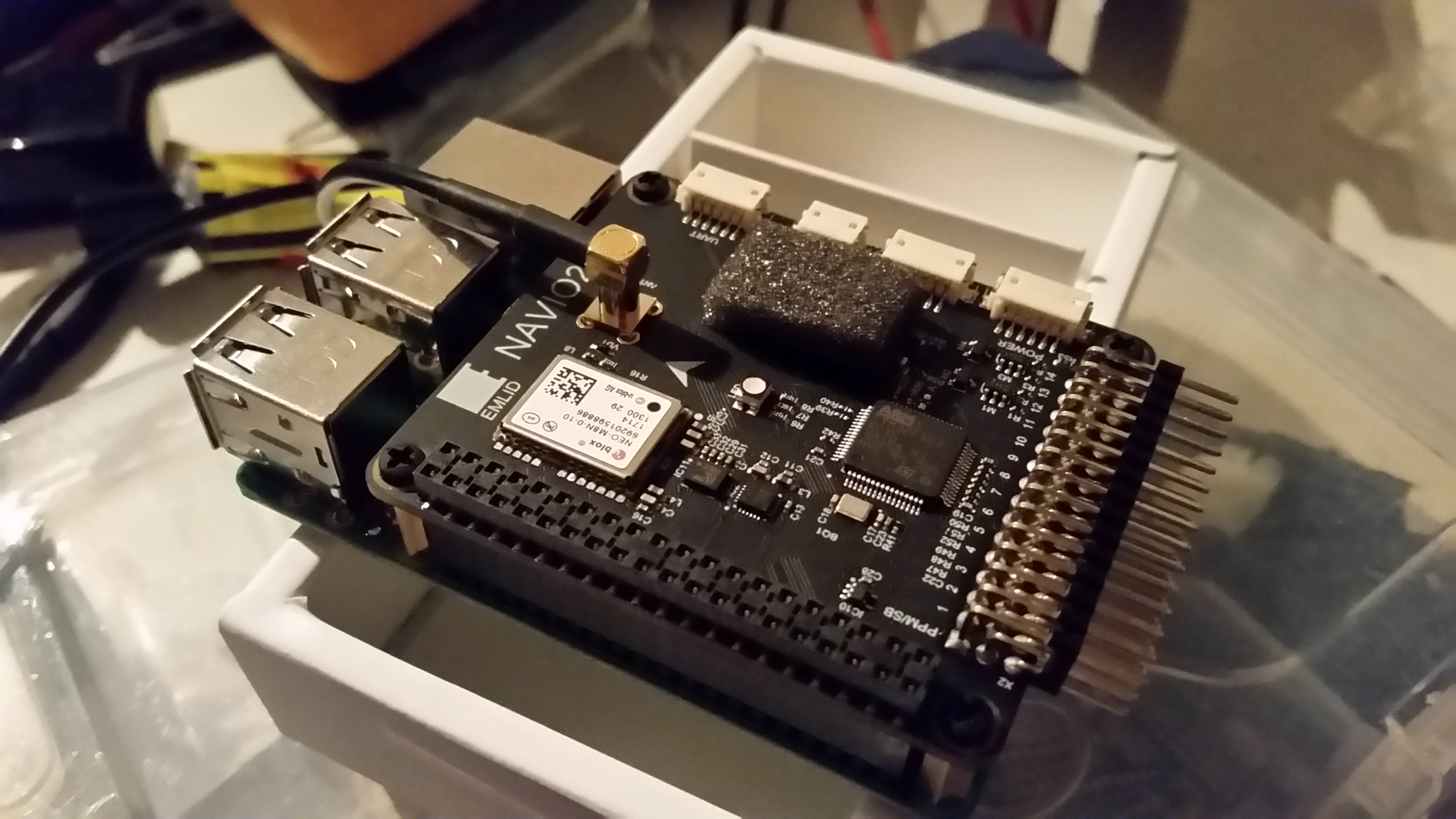
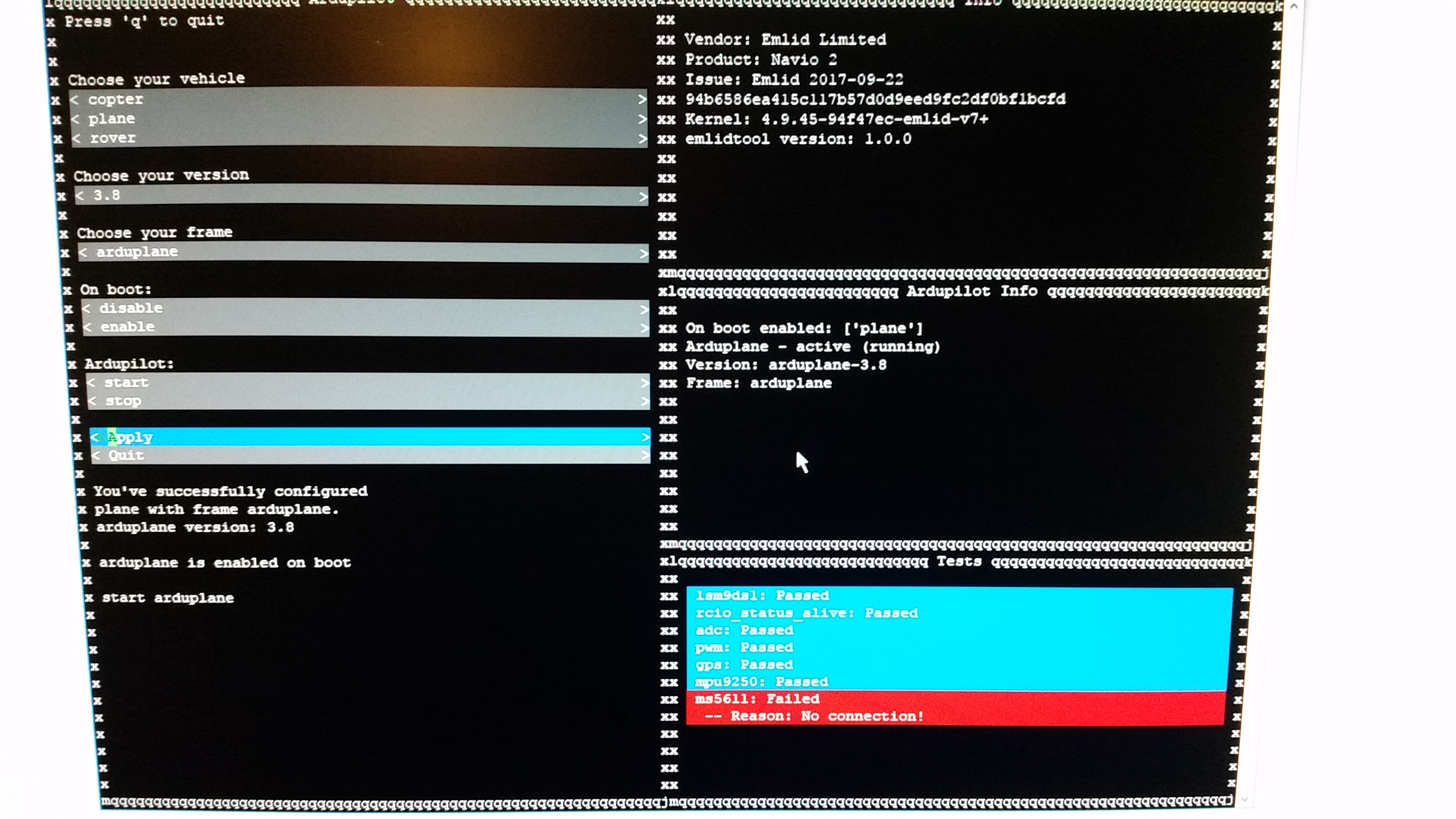
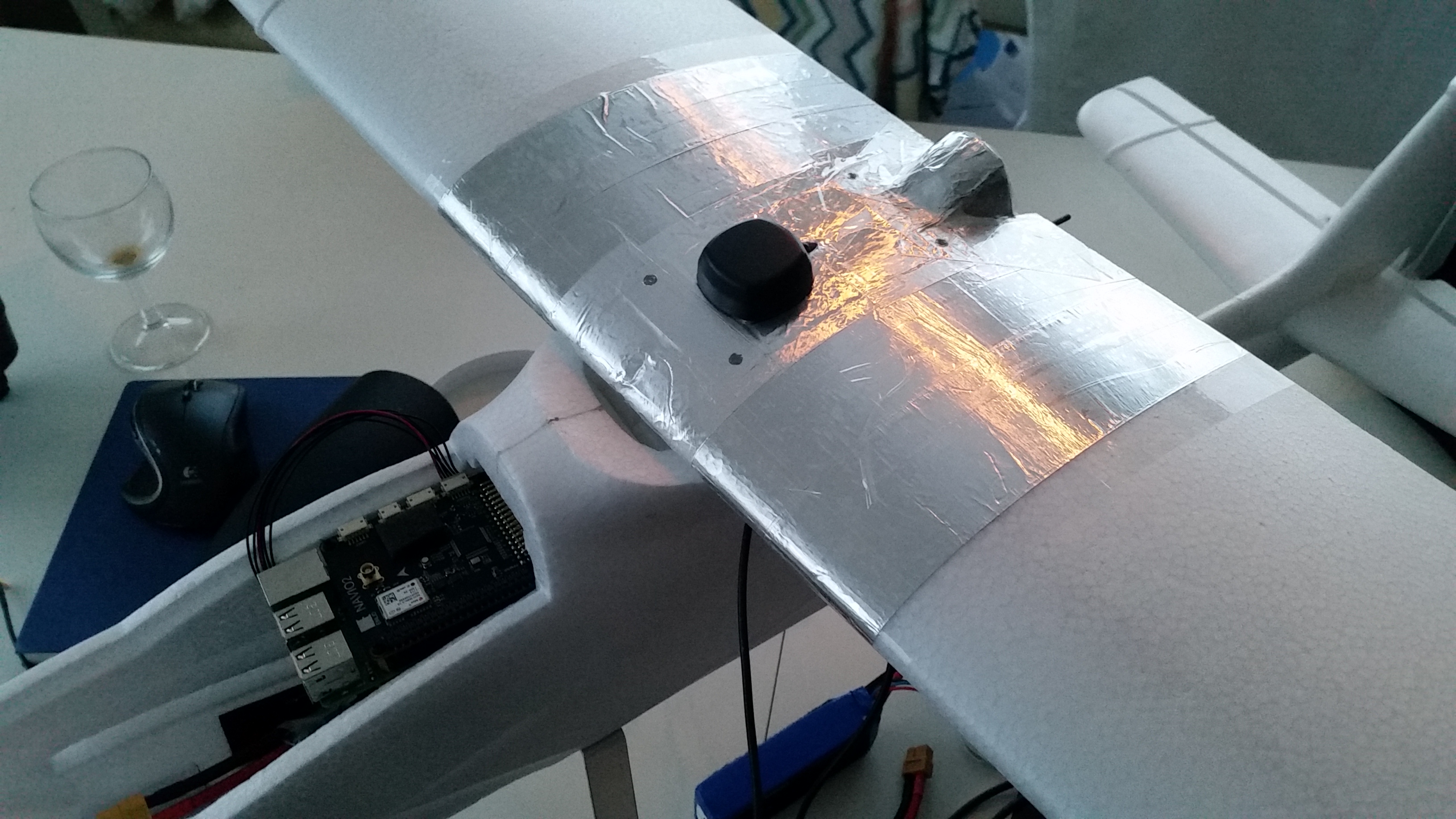
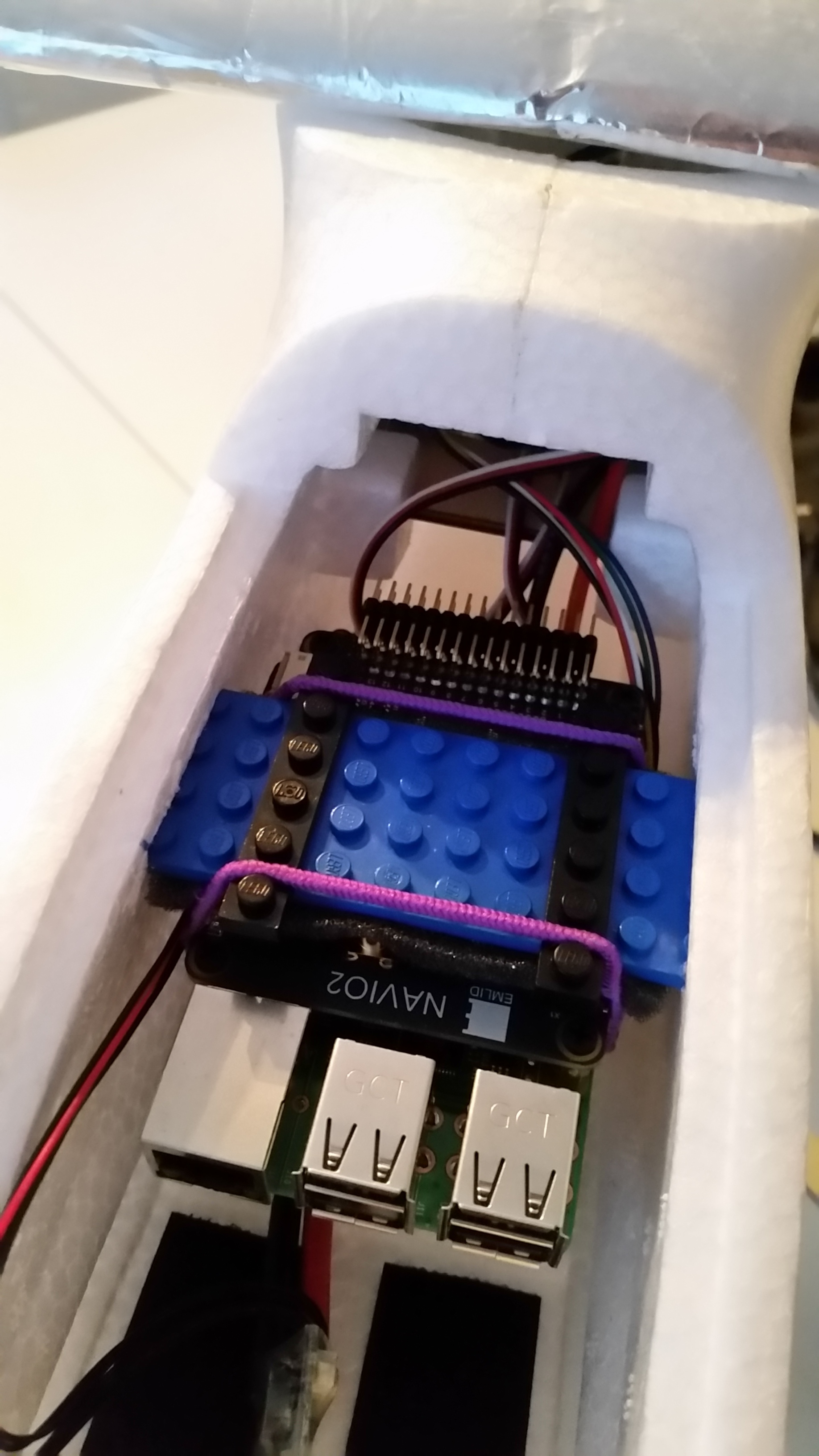
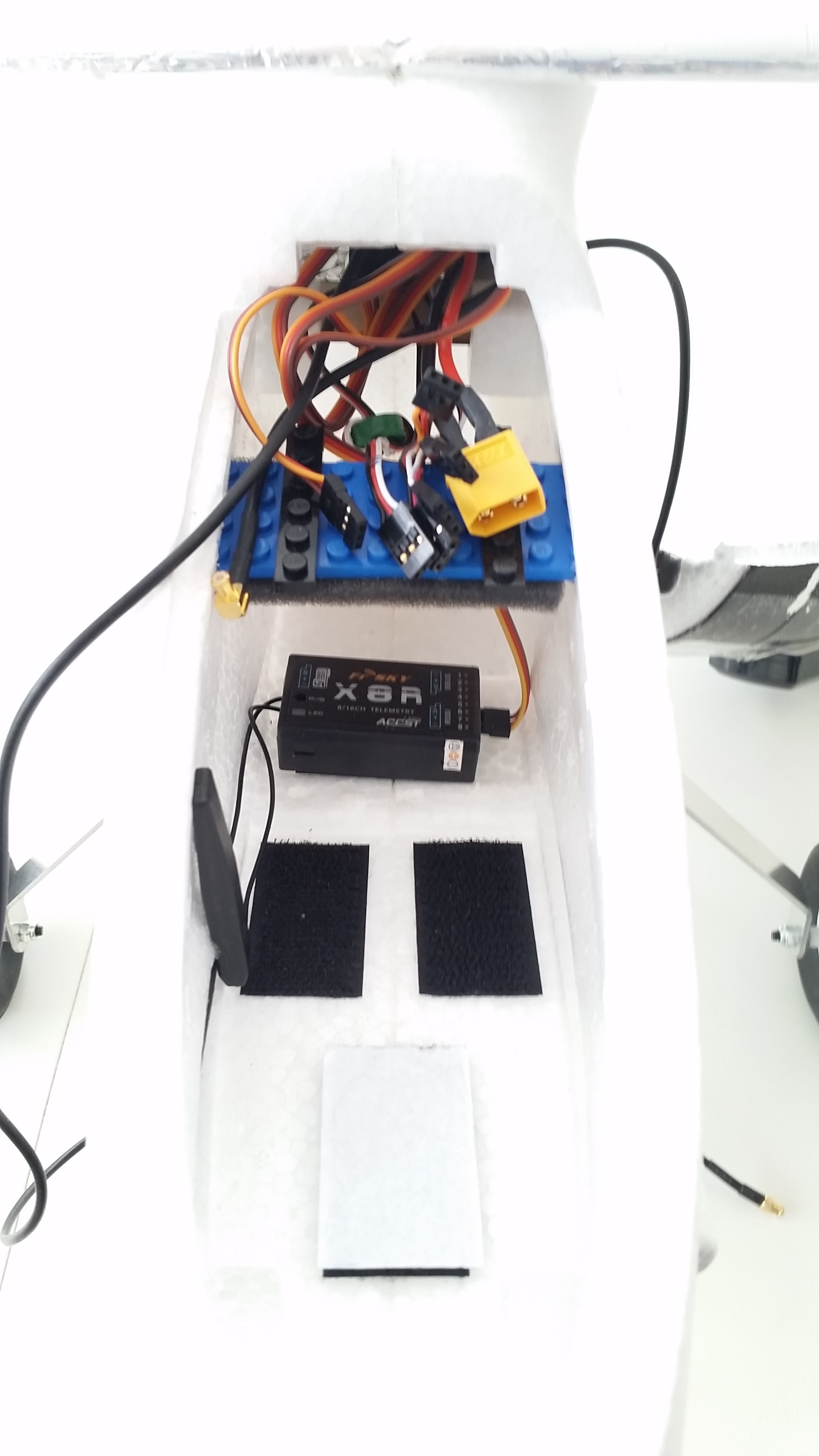
- Its planned to be autopiloted with Rasperry and navio on board, along with some other stuff.
Gear so far:
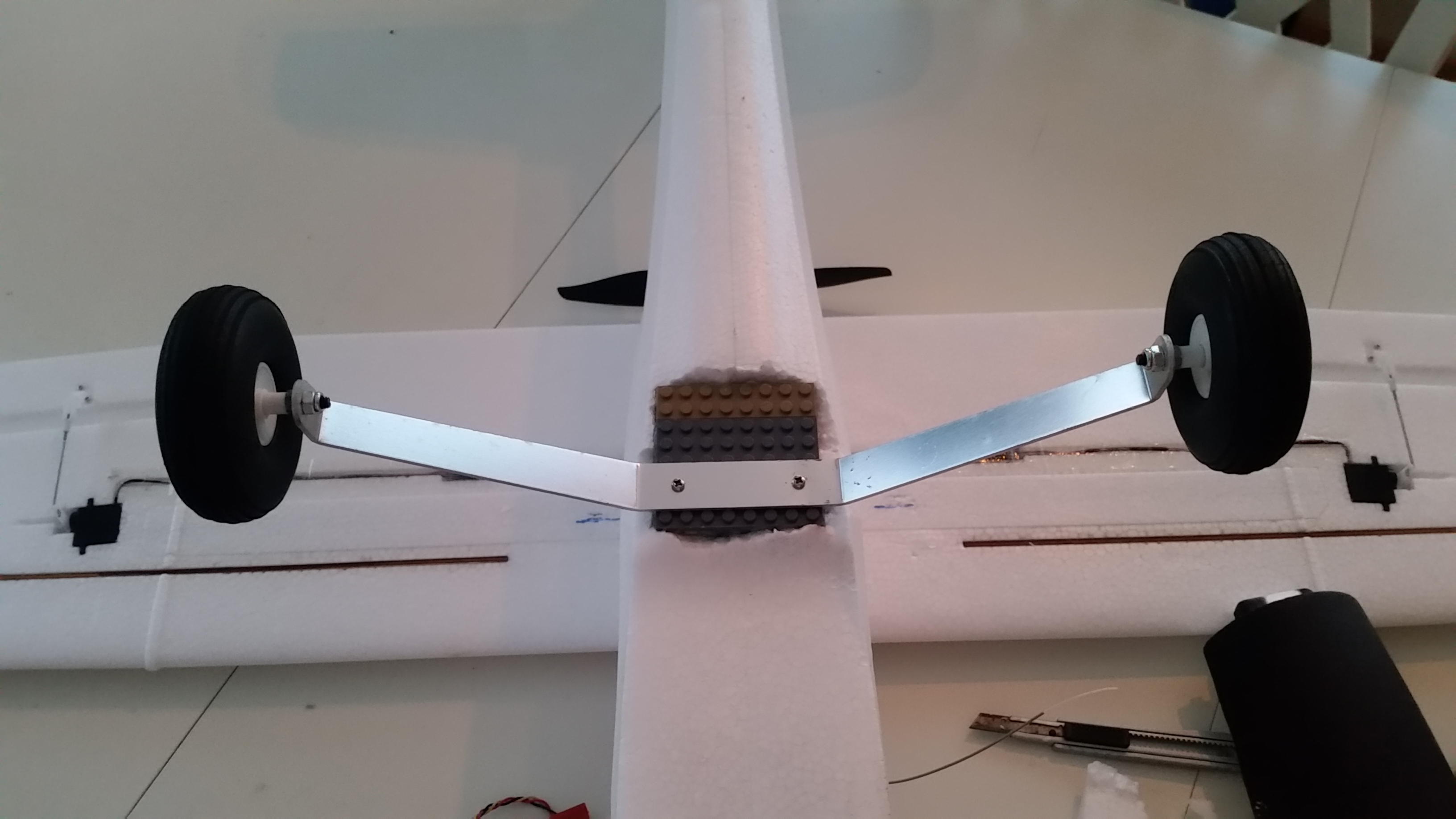
- Airplane 1400mm wide, about 900gram RTF ( i will reveal the plane later).
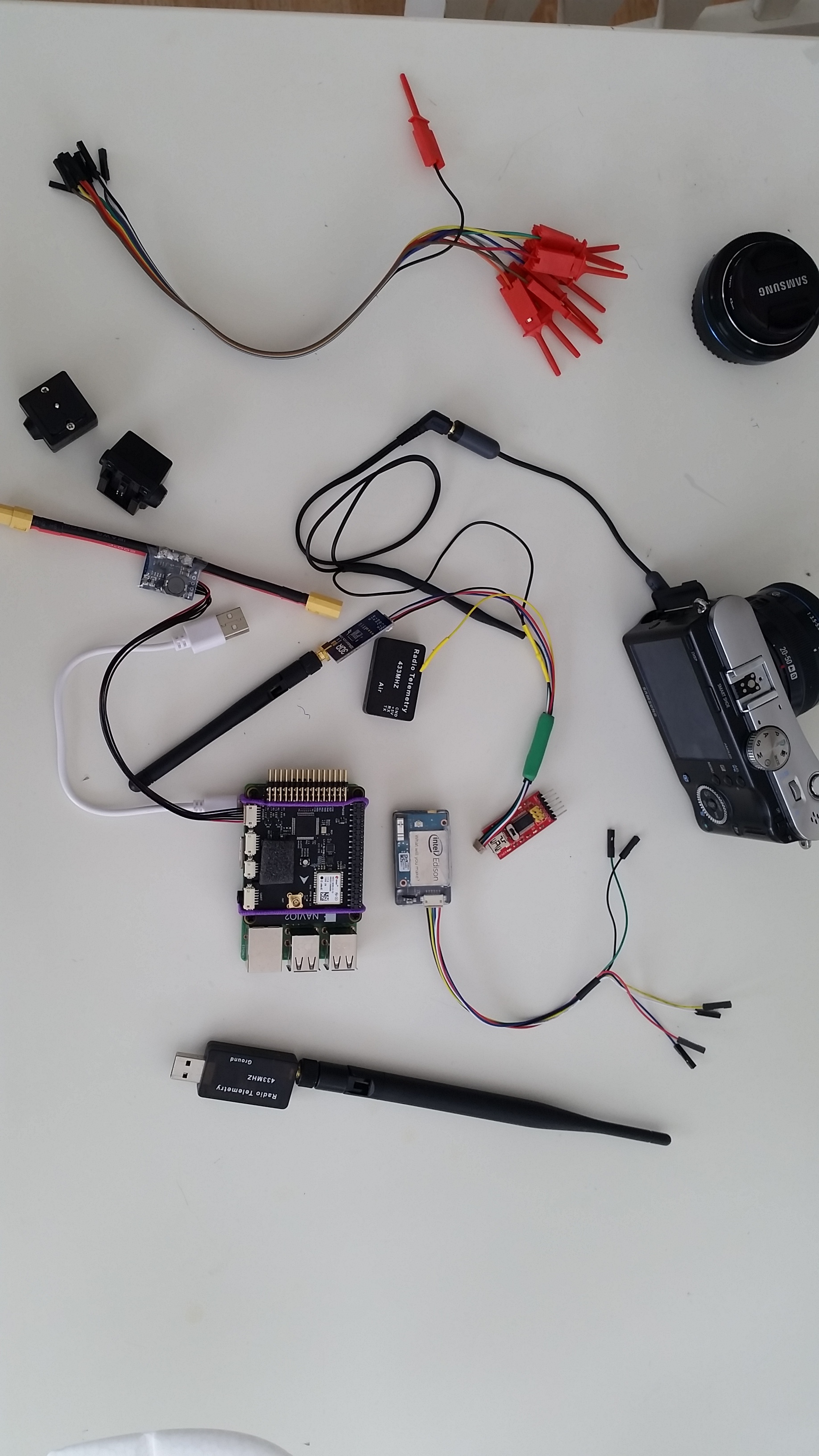
- Navio2 (around 50gram with wire harness) on Raspberry Pi3 ModelB (43gram). I need to weight this in total when it arrives
- Reach GNSS modul (30gram)
- Camera 20MP (about 200gram) and 20mm optics (90gram) I will reveal camera type later
- Also need some radio link, around 100gram. Possible with Emlid Edge some day…
- I also need a better battery, dont think 2200 lipo would last that long.
When summed all grams, i have spare weight. I have a second plane, a bit larger, and also second camera to choose from, to get the optimal setup, right upon the 2,5kg limit.
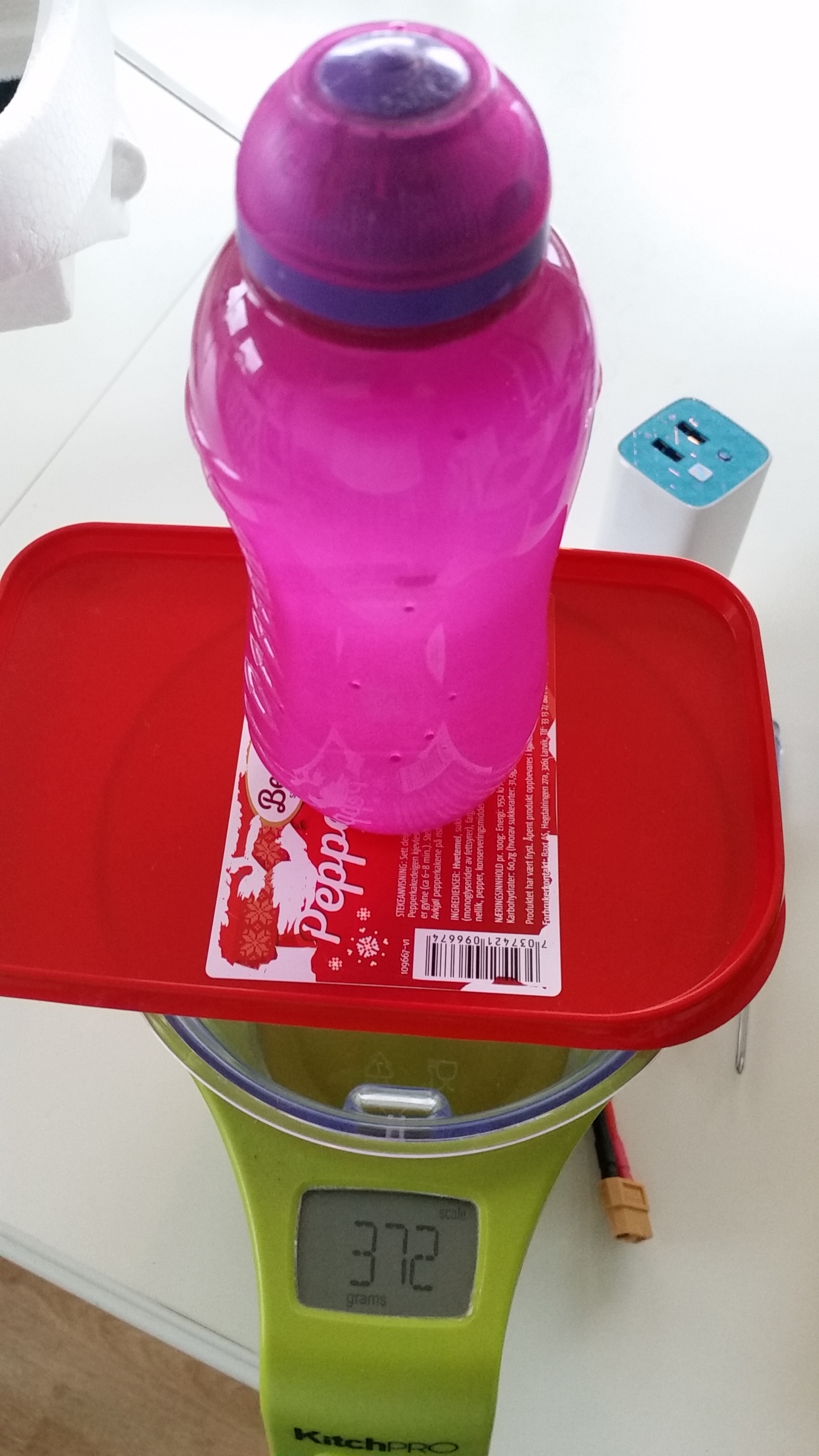
Right now the status is to weight all parts and see if the the plane would take off with the extra weight and for how long etc. Lots of testing.
Any advice and suggestions will be greatly appreciated
Thats it for now. Cheers