I am pretty new to Emlid Reach, RTK, etc. Let me expose to you the setup I am working with :
-One of the Reach modules + GPS antennas are on tripod and serve as the base. That’s static.
-The other pair Reach module/GPS antenna is on a drone and this is obviously the rover. Right now it’s not flying, I just move it around by carrying it.
Note that I haven’t set up APM Mission Planner or the Reach modules to be used as a GPS system by the drone. I am trying to minimize the sources of errors right now so I will do this later. I basically followed the Quickstart guide to configure the Reach modules.
Both Reach modules communicate on a local network through a router. This router is not connected to the Internet since I am carrying out experiments outside. But I updated Reachview to the latest version beforehand. Both GPS antennas are also mounted on ground planes.
Now let me tell you about my routine when I deploy the whole thing outside. I deploy the base and the rover 50 meters apart in a field. They both have an unobstructed view of the skies. I locate and update the coordinates of the base. Then I pray for getting a fix.
So far I have gotten a fix twice, on two different days. Both days had great weather with blue cloudless skies. I was getting 10/12 satellites with 5 or more having a green gauge. The fixes were held for a few minutes, then they disappeared and I never got them again for more than a few seconds both days. I have never obtained a fix with the stock settings. I have been trying to mess with some settings after searching some threads on the forum here, of guys trying to find the right tweaks to get a fix reliably. Unfortunately, this seems to be randomly occurring for me which is why I want to seek advice from you guys :
what settings do you use, tweak, not touch to get a reliable fix ?
Are there some common mistakes/pitfalls to avoid when trying to get a fix ?
Is there a tutorial on how to use/post process logs to understand what’s happening and what could be the problem ?
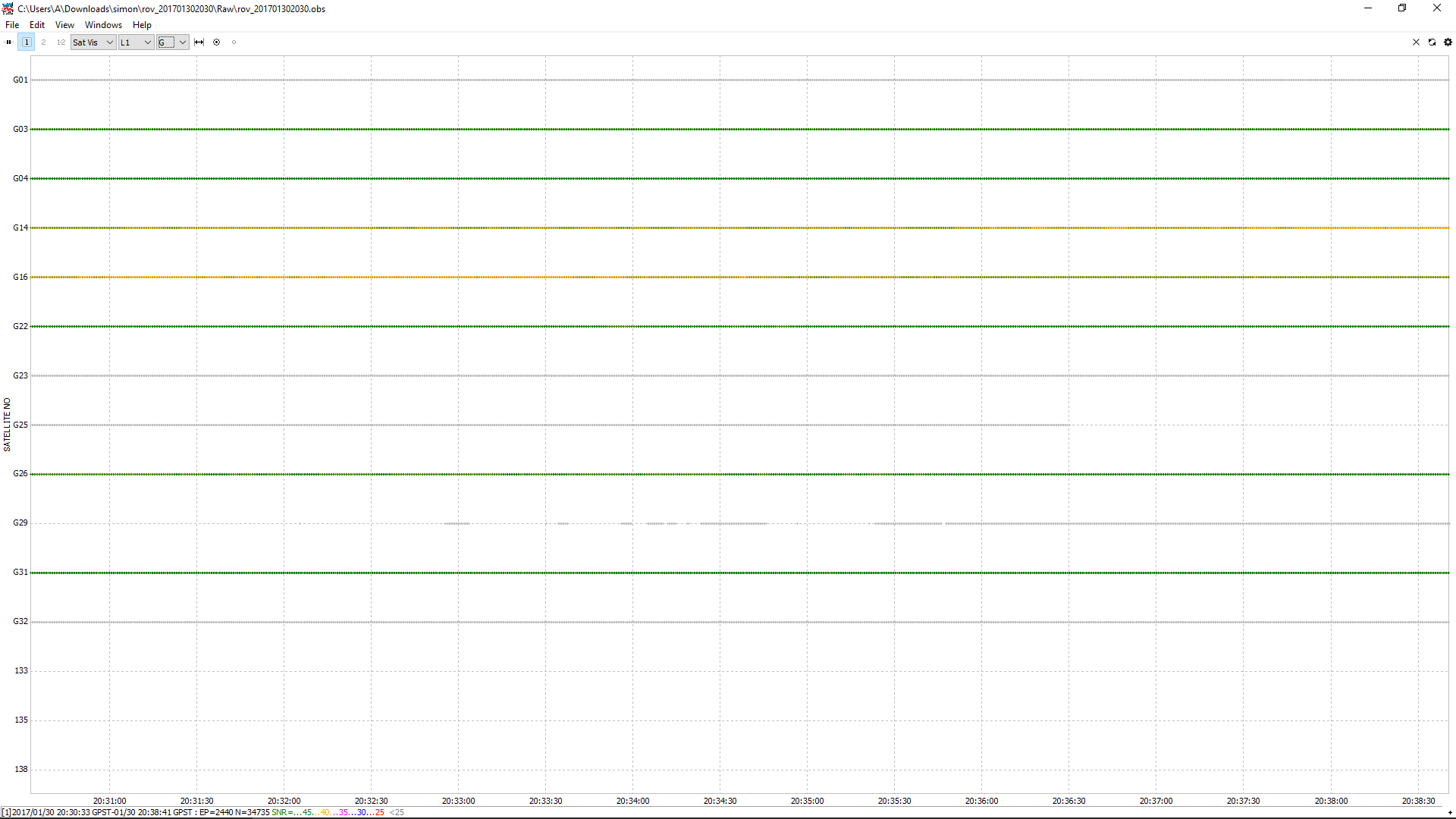
I am attaching a link for the logs of today’s experiment when I got a fix from around 20:34 until 20:37.
@simon.tp.duthoit Without looking at your log files, you say that you have 5 satellites with signal strength in the green range. Are these 5 green satellites all from GPS constellation? No? If they are a mix of constellations , such as GPS and Glonass, then you may need to look for 5 green GPS satellites.
According to you how many satellites should I get, and how many in green ? This is really strange because I am in a clear field without obstructions and with clear skies ! Maybe the Talysman antennas are not performant enough ?
Other question for you, how did you manage to visualize this from the logs ? With a software from RTK lib ?
Lately, I have only been post-processing with the raw logs, so I haven’t been changing the settings from stock except for 10Hz frequency.
I was using the provided Tallysman antennas which were fine, and then moved to the TW3710 which seem good, but I have not done a side-by-side test yet. Maybe soon.
You should see pictures of both antennas mounted on the tripod (base) and the drone (rover). You’ll notice another GPS antenna on the drone but it is currently unplugged, so I don’t think it would bother the Talysman antenna in any way.