



Finally some major progress.
It`s all related to the above info and my goal to use Reach for survey anything.
I finally got some time to test my gear and also got my self a provider for correction. Local ntrip from Kartverket
My goal is to open my workdrawings with fields coordinates and info on my autocad360 app on the phone and survey points to the ground on our contruction site, all this with Reach in a plastic lunch box ![]()
So, this time i made a square mark in arhicad, it`s 2000x2000mm and is geolocated with local reference as you can see from the image below. Once this drawing was done and some other points where placd, i saved this as .dxf and open it up in autocad360 to check everything looks ok.
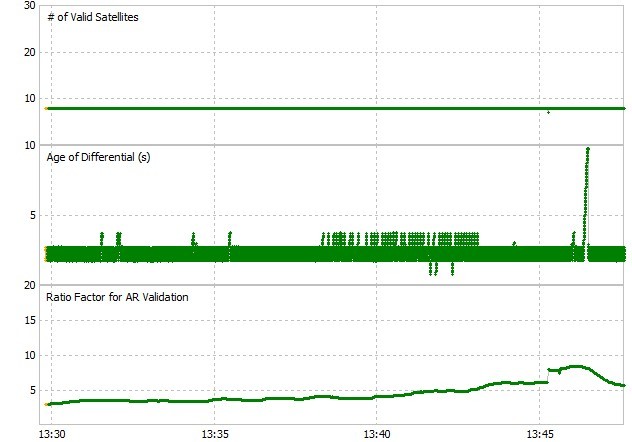
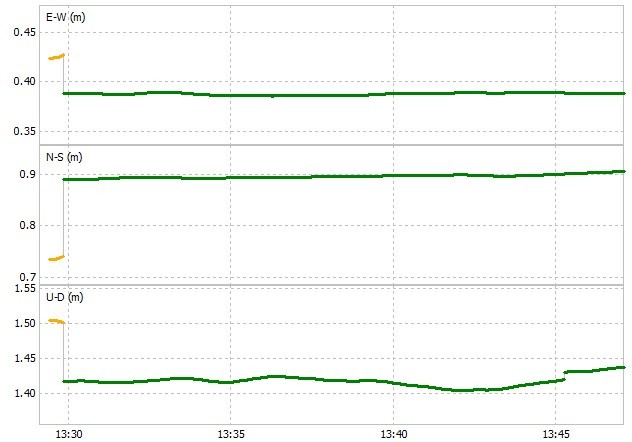
Next thing was to connect reach to ntrip which provide VRS baseline and cm accuracy. My location is not that good so i did expect the worst. After some adjusting with the setting i got up grey bars, Yay. Now i had to wait about 10min with pretty accurat float before fix nailed it and stayed fixed for over an hour continuesly, Awesome. Se pics below.
With bluetooth enabled and connected with GPS bluetooth app, i open up autocad360 to manually set the reference point. I know my dxf drawing was geo refered by i didnt wanna hasse with that now. So with known point i set my location and can see my self walking around in my drawing and the 2x2m square drawing to stake out. I made a screen record and uploaded it to youtube for you to see. You can see how a adjust scale in autocad to precisely navigate the rover over the point. Now, the ground was not level and rover was mounted on a tripod which made the stand not perfect vertical, so some inaccuracy in this metod but my point is proven. I think i got the most of it and all i can say is that i am impressed by the level of accuracy from Reach. Im very saticfied and i`m gonne work on routine and workflow to make this my favourite tool.
I have one obstacle left, and that is to find a way to know when reach is in fix/float mode, because with autocad open i can`t see is the coordinates is fixed or not. Any idee here?
I did read something in docs that green light flashing on reach meens fix, but i think mine is blinking green in float and fixed mode. Anyways, here are som pics.
You can see from the image where i have marked the ground while surveying in the youtube clip.
Link to youtube: RTK cm accuracy with ntrip provider and Autocad360 - YouTube
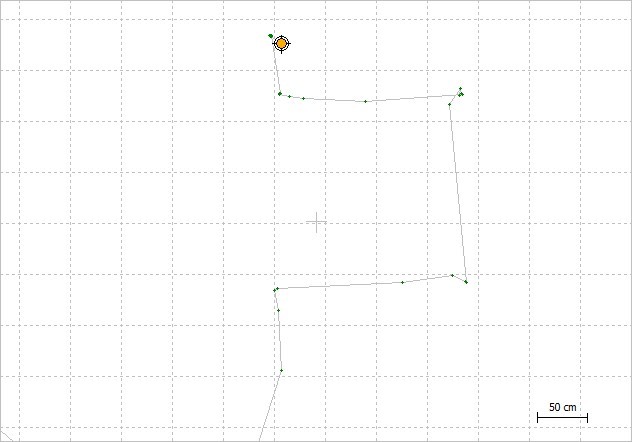
On the image above you can see how rtkplot is logging my movement when trying to marke my 2x2m square drawing.





Final image shows 2x2m square marks on the ground. I`m satisfied