Hi guys,
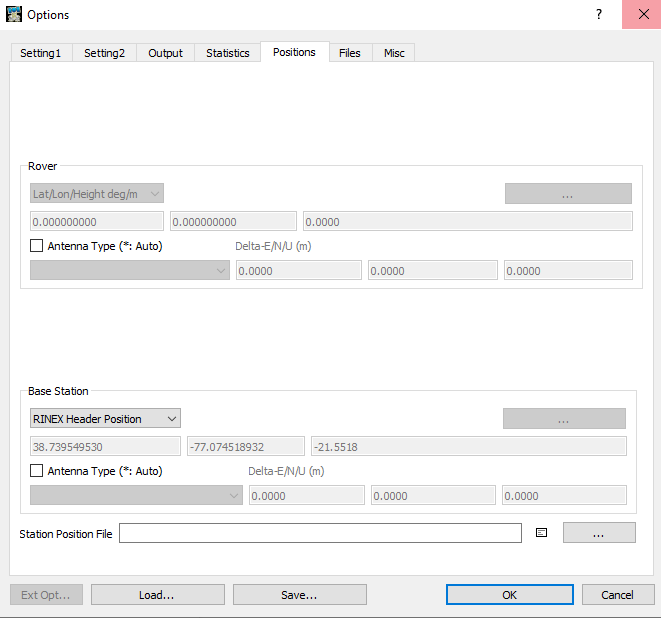
I recently acquired two RS2 units and been testing them out. For test, I set up a base station and rover nearby a NGS survey marker, and took 165 seconds reading on the rover set up on tripod. I went back to RTKlib for post processing. I used a nearby CORS unit ( 14km from my site) as my base station during PPK. The data I obtained from PPK, and the data on the NGS data sheet are 1.2 ft apart, and the difference in ellipsodial height is 2.58 m. Can someone please see what I am doing wrong. I used three different CORS station, but same result. I am worried that I may have gotten a defective unit. Here are the data and observation I used and got.
Using RTK (fix) W 77°18’20.60309", N 38° 50′ 27.74746" , 96.31393091(m)
After PPK - W 77°18’20.55367", N 38° 50′ 27.68867" , 101.3667(m)
Offical NGS data-W 77° 18’ 20".54110, N 38° 50′ 27.69358", 98.782(m)
Please see the google drive link for project files. Any help with this would be highly appreciated.
https://drive.google.com/drive/folders/1UE3PS1GMOSD-QkSB7KhRJuBxfGoLTFKx?usp=sharing
Simple system report
app version: 2.22.5-r0
'wifi_status, interface: wlan0':
- wifi_mode: infrastructure
- ip: 192.168.1.137
is_added: true
is_connected: true
is_visible: false
mac_address: C0:84:7D:39:C2:21
security: wpa-psk
ssid: GEWifi
uuid: 9ef736d7-5c82-4c2e-bd49-b265d41425c2
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- 0
- 0
- 0
format: llh
mode: single-and-hold
output:
enabled: false
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1006':
enabled: true
frequency: '0.1'
'1074':
enabled: true
frequency: '1'
'1084':
enabled: true
frequency: '1'
'1094':
enabled: false
frequency: '1'
'1124':
enabled: false
frequency: '1'
bluetooth:
discoverable: true
enabled: true
pin: '***'
constraints:
lora:
frequency:
- - 902000
- 928000
correction input:
input2:
enabled: true
format: rtcm3
path: lora
send position to base: 'off'
type: lora
input3:
enabled: false
format: RTCM3
io_type: tcpsvr
path: :9028
device: null
logging:
base:
format: RINEX
started: false
version: '3.03'
correction:
format: RTCM3
started: true
debug: false
interval: 24
overwrite: true
raw:
format: RINEX
started: false
version: '3.03'
solution:
format: LLH
started: false
lora:
air rate: 18.23
frequency: 915000
mode: read
output power: 20
position output:
output1:
enabled: false
format: nmea
path: bluetooth
type: bluetooth
output2:
enabled: false
format: llh
path: :9001
type: tcpsvr
rtk settings:
elevation mask angle: 15
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: 1
max vertical acceleration: 1
positioning mode: kinematic
positioning systems:
compass: true
galileo: true
glonass: true
gps: true
qzss: true
snr mask: 35
update rate: 1
sound: null