Hi, @Alok_P
-
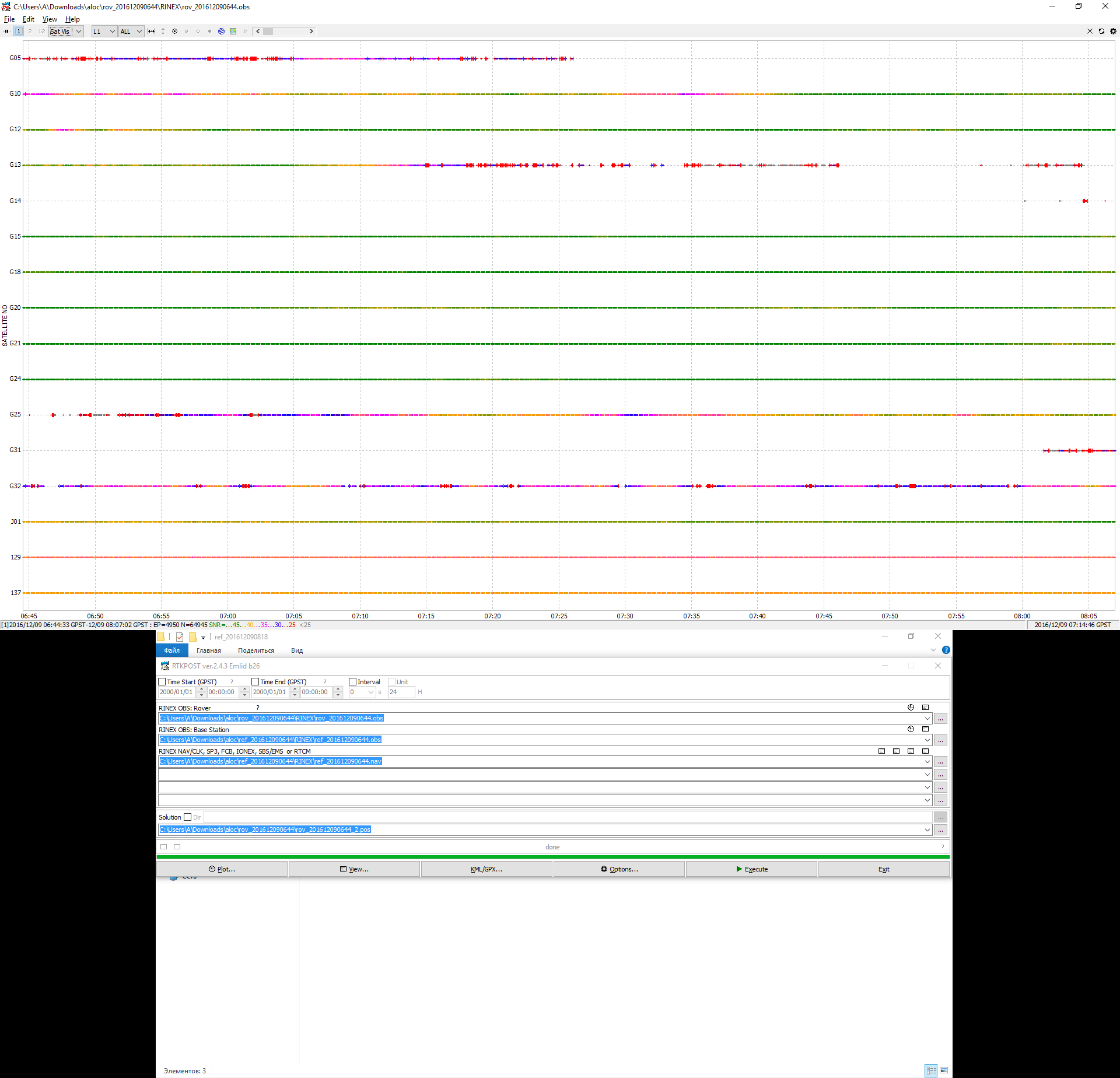
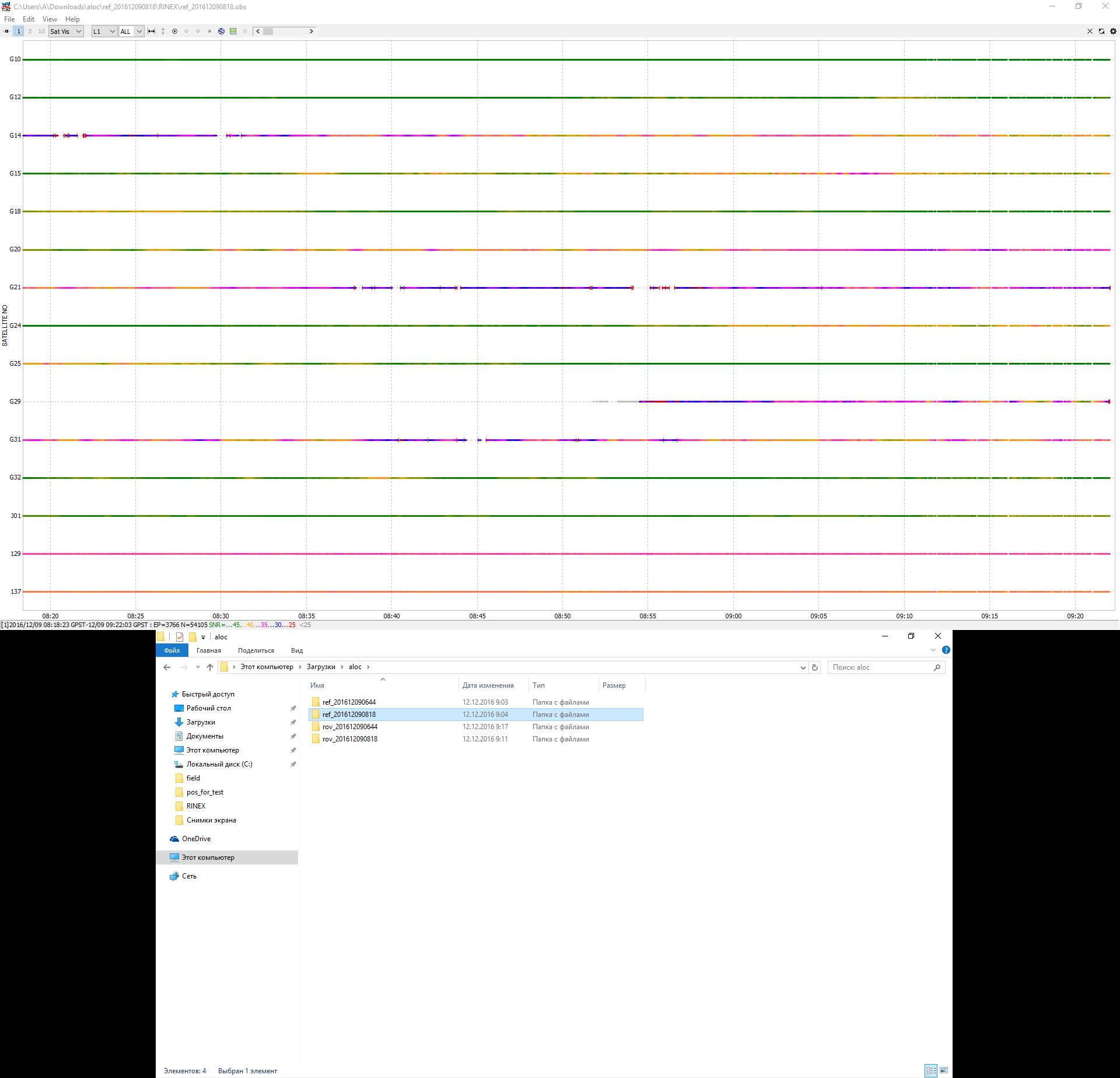
Try to turn on GLONASS to get better satellites visibility. Now you have only 4-5 “good” satellites.
-
Try our new beta & patched RTKLIB apps. There’re a plenty of new features which could help you in work.
Hi, @Alok_P
Try to turn on GLONASS to get better satellites visibility. Now you have only 4-5 “good” satellites.
Try our new beta & patched RTKLIB apps. There’re a plenty of new features which could help you in work.