



Very excited to share my experience with Reach as a powerful instrument to measure Rip currents.
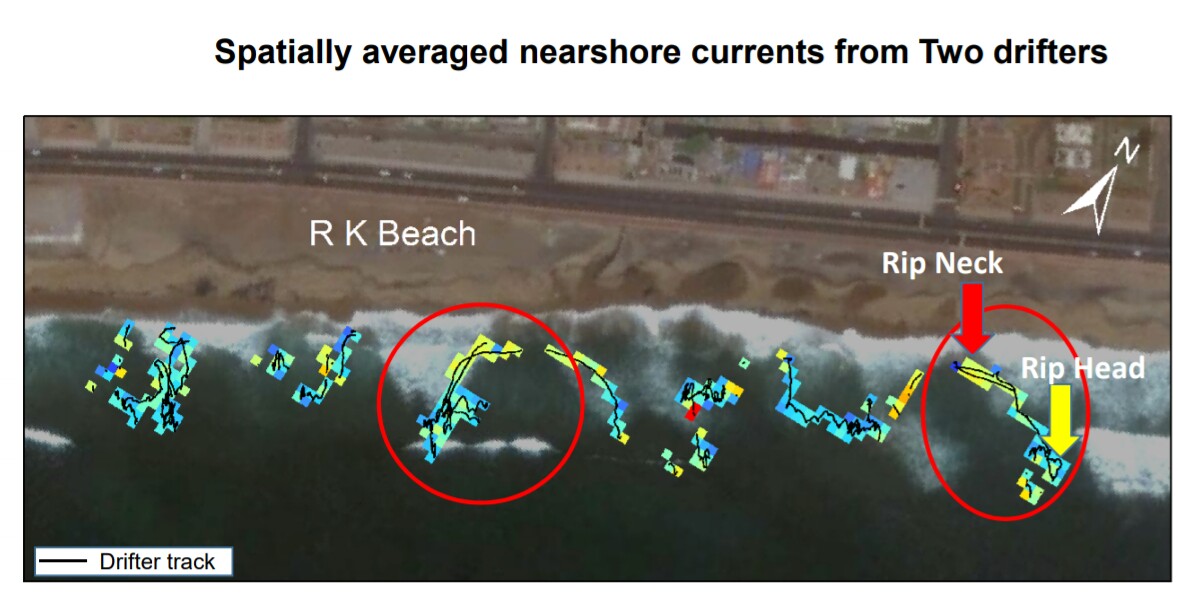
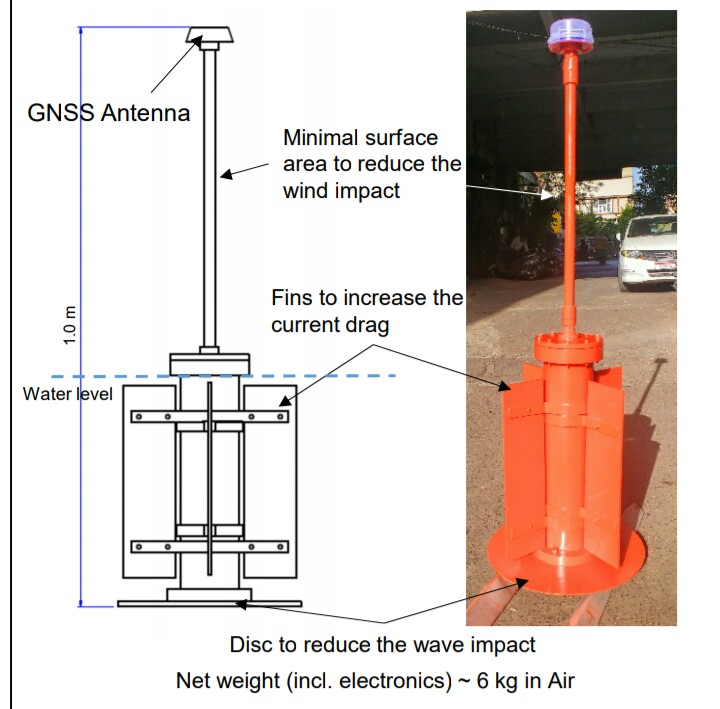
These two drifters were deployed in the surf zone and the data was logged. A base station (Reach RS) was kept at the shore in static mode. Both the data were processed using RTK LIB. Great application of Reach.