Hi everyone,
I want to use REACH to measure rip currents in the nearshore, high surf conditions. I’m not having an engineering/ electronics background. Can anybody assist me what kind of setup and accessories are required?
regards
Arun
Hi everyone,
I want to use REACH to measure rip currents in the nearshore, high surf conditions. I’m not having an engineering/ electronics background. Can anybody assist me what kind of setup and accessories are required?
regards
Arun
All you need is a Reach kit and 2 power supplies (USB battery bank). Don’t forget your laptop. I can’t think of anything else that is essential for the task.
I suppose you could use a self-righting RC boat to travel to against the current and then stop and let it drift with the current. Or even a life ring or surfboard would work for the purpose. For more stability though, what about:
You could use a waterproof Pelican case (or similar - Tupperware if you like taking risks with your equipment in the pounding surf). The antenna could be mounted on the case and the antenna fed through a strain relief or something like a CableClam.
The second Reach would be sitting safely on the shore or back at your office.
Is that a good start?
If you have a large budget, then what about buying 20 Reach units and setting them up on micro-sized floats? From your boat or jet-ski, toss them all out in the water in a straight line perpendicular from the seashore.
That way, you would have multiple paths ranging from near shore to far and a great dataset for visualization and analysis.
I suppose the same could be said for tossing tennis or volleyballs in the water, but then you would probably want to have a camera on a UAV or on a crane to capture the movements. A skyscraper or tall cliff would also do. The camera would need a wide enough field of view, and at the same time, enough resolution to see the individual balls. Plus you would have to process though motion capture software. Also without enough drag in the water, error caused by the wind would be a large problem.
So probably, it would be easier with a bunch of floating Reach devices. Especially from the data processing standpoint.
Hi Bide,
Thank you so much for a detailed explanation. In-fact, I’m planning in a similar way with the help of drifters. However, how do the base and rover communicate with each other without an RF antenna? Please let me understand whether to go for it or not! I saw in some youtube video, they used a 3dr antenna for connecting base and rover stations at longer distances (10km) on land operating their quadcopter. Do I have to buy it separately.
Also, in the documentation, it was said that internet is required for setting up the equipment. How do I provide internet for remote locations?? Do I understand it correctly.?
I don’t know much details about GPS post processing. I require only lat,long, velocity for my observations. Can I get this information directly from the REACH?
And many questions…Can you please guide me.
regards
Arun
Hi Bide,
Your are right! We have just started in India. Thanks to REACH team for making it very affordable for researchers.
regards,
Arun
The base and rover can communicate in several ways, but in your application, you should not require real-time positioning. You have a choice to make:
It would be more simplistic to choose post-processing, where you would allow the Reach device to log the data and then you can download the data to your laptop after the mission is complete. You would then use post-processing software to compute the precise track with the logs from the base and the rover. RTKLIB is the software package that is the core of the ReachView app and is also most commonly used afterward for post-processing the logs from Reach.
Not to worry, an internet connection is only required for updating the device.
I recommend that you download the RTKLIB software and run RTKPOST.exe (a Windows app). In that app, you can open a position file (.pos) and view the lat, long, and velocity.
Several people have uploaded their logs to this forum, and there is also a Wordpress website called rtklibexplorer which has demo logs. Perhaps you would like to download these logs and use the Reach documentation to post-process the data into position files for viewing with RTKPOST.exe. The resultant position files are human readable text files and the layout is described in the RTKLIB documentation.
Have fun!
how would we enter the long lat should we have to manually input or is their something related to rover mode?
Im not sure i understand your question but base (with Beta 2.1.6) calculate and average its position or have manual entered its lat long value and placed over a known point. Hope this helps
thanks !
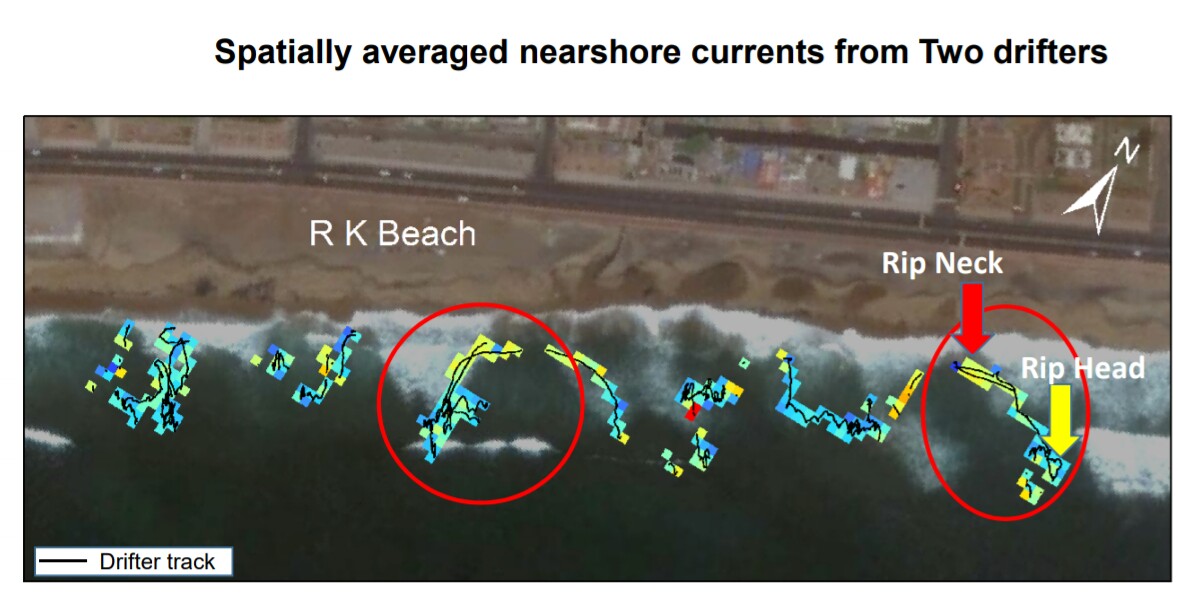
Very excited to share my experience with Reach as a powerful instrument to measure Rip currents.
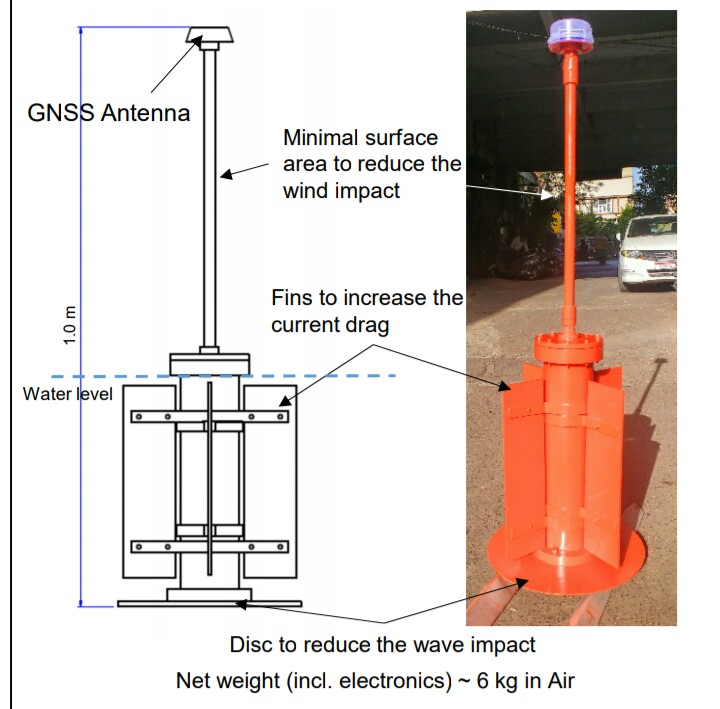
These two drifters were deployed in the surf zone and the data was logged. A base station (Reach RS) was kept at the shore in static mode. Both the data were processed using RTK LIB. Great application of Reach.
I read this when it was first posted, but didn’t have time to comment. Coming back to it, II have to say that is very cool. Cool in the sense of the drifter design and its elements; also in the sense that measuring rip currents is a novel use of Reach.
Remember folks: Swim parallel to shore to escape if ever caught in a rip current!
Thank you so much @bide for the comments. I’m wondering whether our Reach module can share its position live to the shore station via GSM module (external). This is required because in many cases, Rip currents are carrying our drifters away from the shore, and sometimes they are not visible to us until the currents bring them back. Any suggestion… how to go ahead with the real-time tracking of position.
I know others have connected GSM modules, but I have not done it myself. There had been some previous discussion about using them on the forum here.
Radios seem easier to me, but I suppose if the drifter went far, far away, then I suppose using GSM, the drifter could be picked up by the nearest cell tower.
Funnilly enough I use the Reach RTK unit to report back its position through a 3G modem. The modem is set up as a TCPIP packet server and I connect to its IP and receive the packets. Very clunky, but it does work.
Hi @Simon_Allen thanks for the comments. Can you please make me aware how exactly can it be done?. Any links…?
If you have the right modem. Say an Intellimax Lite 4G then you set it up as a packet server, pump NMEA into it via a uart to rs232 converter and the data comes out on the client that you point at the ipaddress and port.
I put an Arduino between the reach and the modem to bring in a few other sensors as well and reduce the transmission rate to once every 10 secs.