



Thanks for your help, I’ll be commenting every step as I go, just to be sure:
Ardupilot config set to not touch anything on the GPS
Reboot, stop arducopter and I’m in u-center (usualy I used Mavlink Serial Passthrough in Ardupilot to connect u-center, but now I’m doing it like you said by turning off Ardupilot, it’s much less buggy)
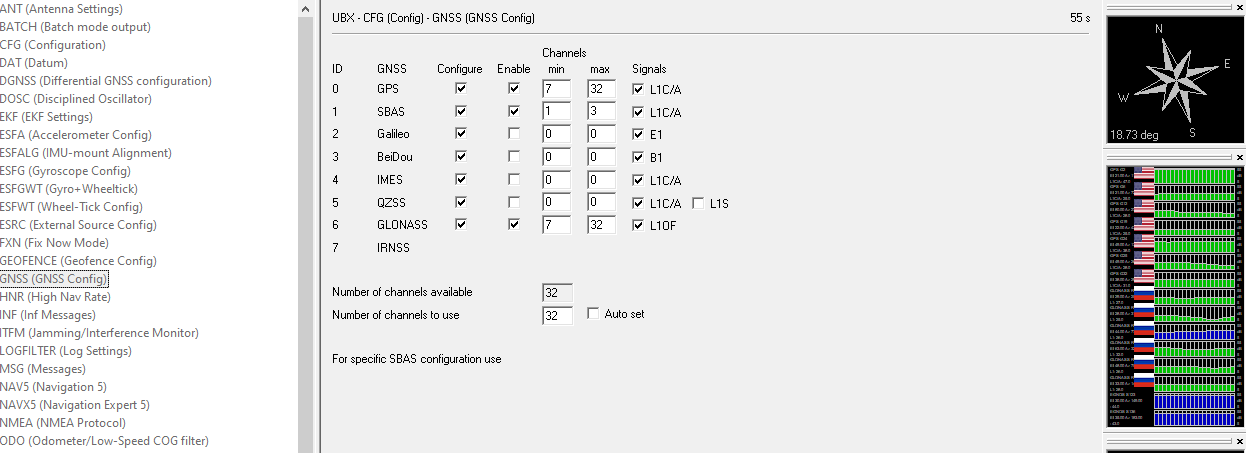
GNSS is already just like yours, I didn’t change a thing
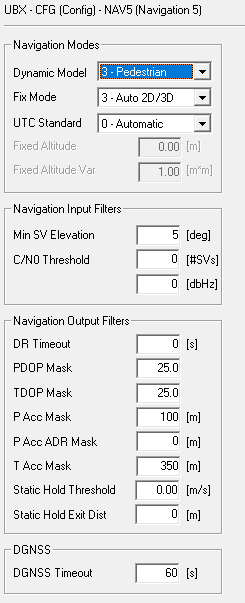
Nav5/Dynamic model was on 8 (airborn) as usualy advised by ardupilot. I switched it to 3 (pedestrian), I won’t be going fast anyway.
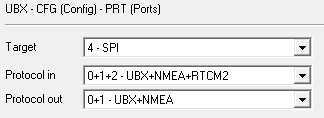
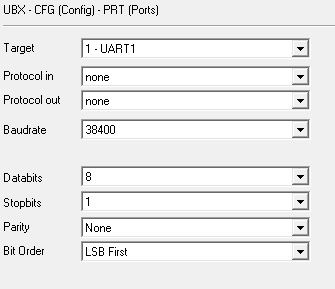
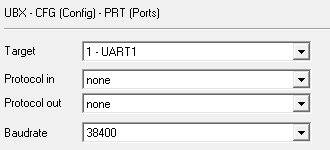
This was my PRT (seems empty):
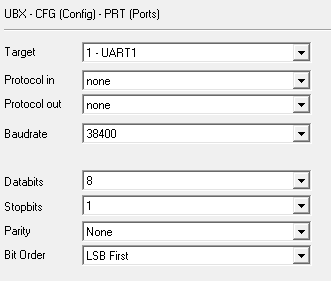
Changed it to SPI:
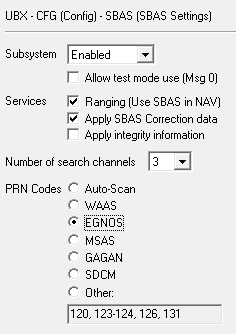
SBAS was enabled, but PRN Codes were set to “Other”. Switched it to EGNOS because I’m also in Europe:
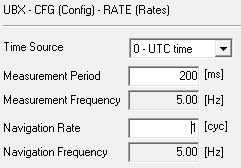
RATE was at 100ms (10Hz), switched it to 200:
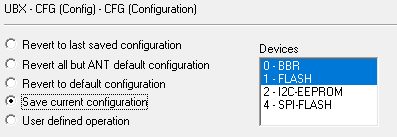
Sent the config at the bottom right on every step, in the CFG panel at the end of everything, then double checked everything.
Reboot and let’s see if it works…
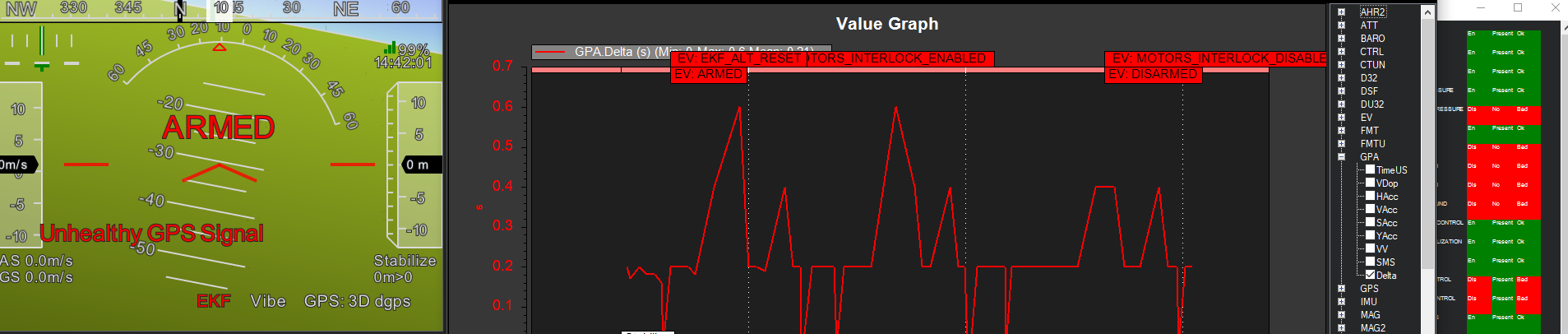
Sadly it’s the same as before, GPA.Delta is going everywhere with “Unhealth GPS Signal” (9 sats) and red EKF:
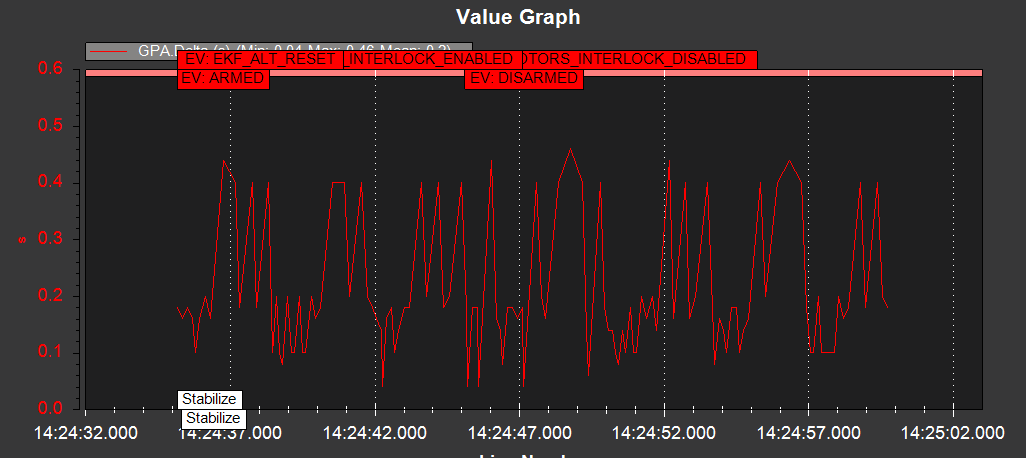
(12 sats on my roof now)
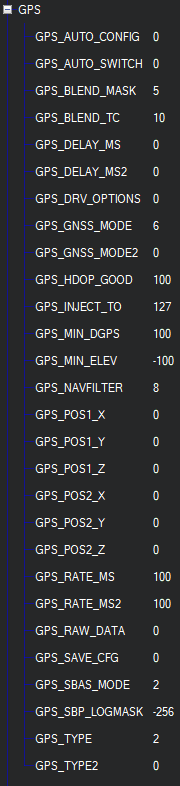
I’m going back to u-center to check if the changes are still here (I also changed GPS_RATE_MS to 200 and GPS_GNSS_MODE to GPS+SBAS+GLONASS in Ardupilot, didn’t do anything).
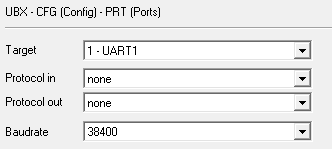
For some reason this changed, I’m changing it to SPI, the rest is ok:
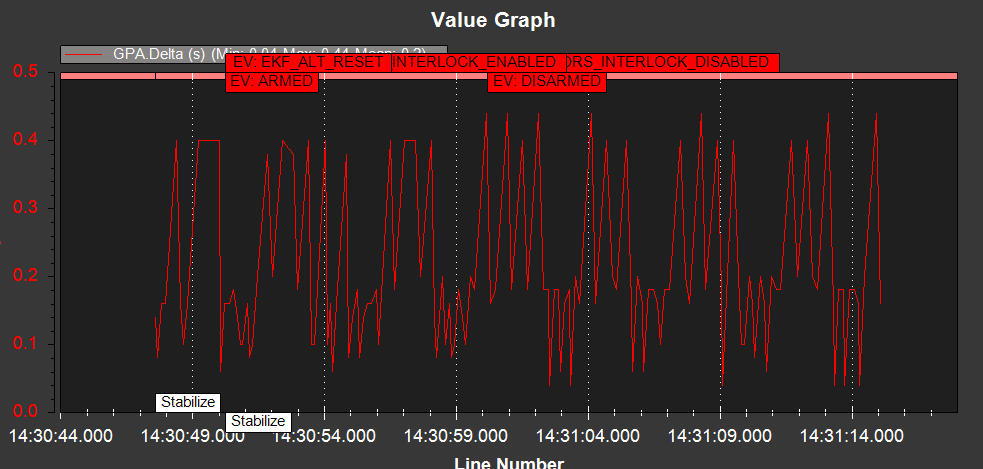
Saving the config, reboot and tying again… Nope:
Going back to u-center … This bloody Port doesn’t want to change!
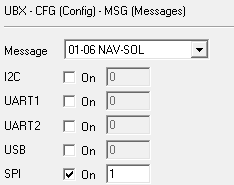
In message I tried enabling SPI (only once):
rebooting… and it changed back to the wrong thing
I’m disabling Ardupilot on launch to check if he is not changing this parameter on launch.
Nope, PRT keeps changing back to 1-UART whatever I do:
Before you ask, for sure I’m clicking on send at the bottom left while in “PRT” and then a second time in “CFG”.
I believe “poll” downloads the configuration from the GPS, when I “poll” after changing PRT/Target to “4 - SPI”, nothing happens, SPI is there just like I want it.
BUT after some time, if I close the “Configure” window, and re-open it, PRT/Target falls back on “1 - UART”, same if I restart u-center.
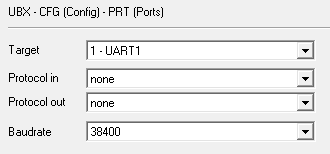
While in “1-UART” I tried changing protocol in/out, but this also falls back on ‘none’.
I don’t know what’s happening here and why PRT/Target doesn’t want to change.