



Data collected on DJI Phantom 4 carrying Reach in cradle and sychronising image capture with Reach events.
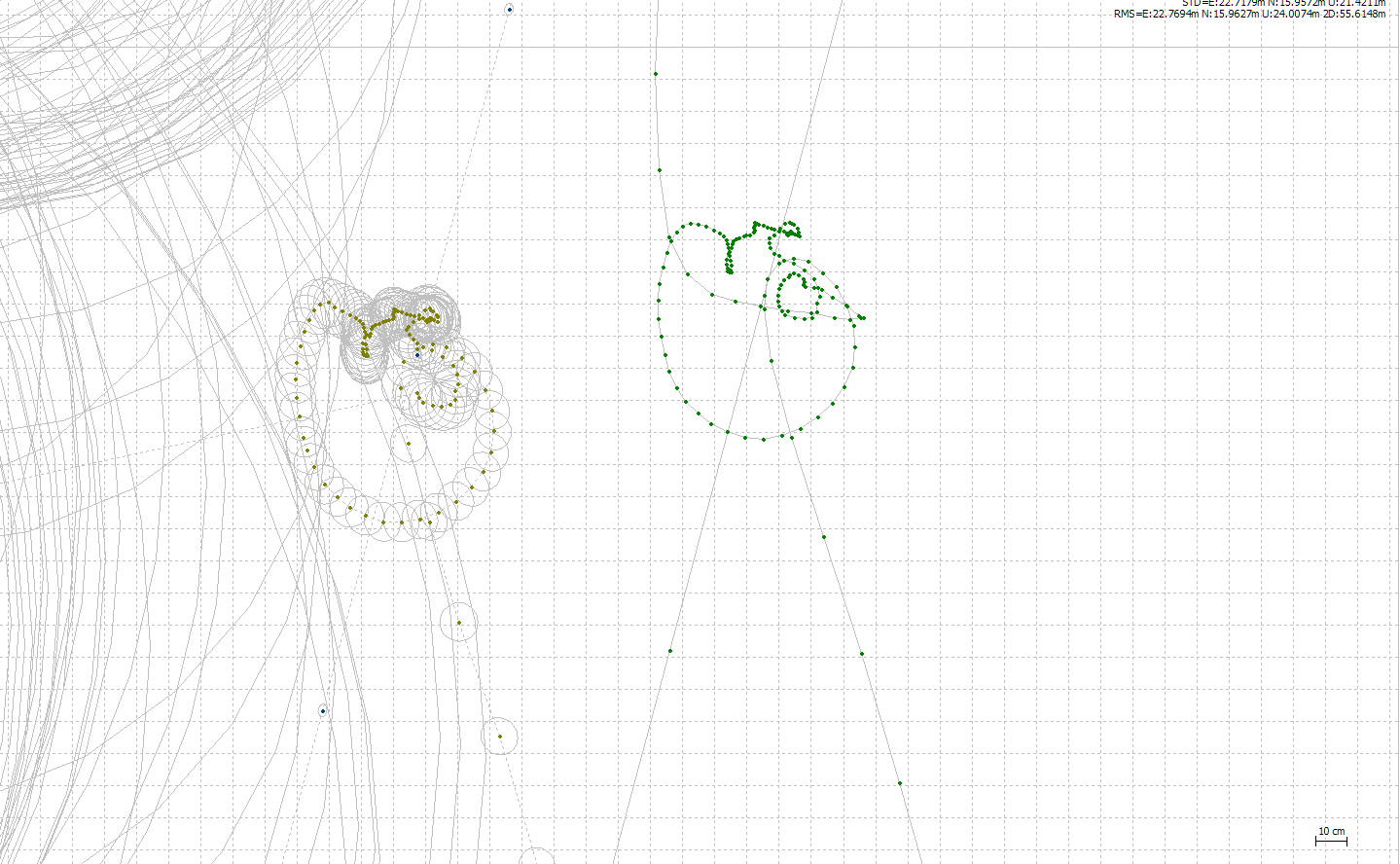
RTK on left using the auto setup of base after 5 mins
PPK on right using RinexHeader station position
Short term fix for me is to establish base, write down the values (good practise anyway) and then use these in post processing rahter than the rinex header position.