



Has anyone managed to create a successful workflow for using a Reach RS2+ as a base and a Topcon Hiper V as a rover.
Hi @wrussel,
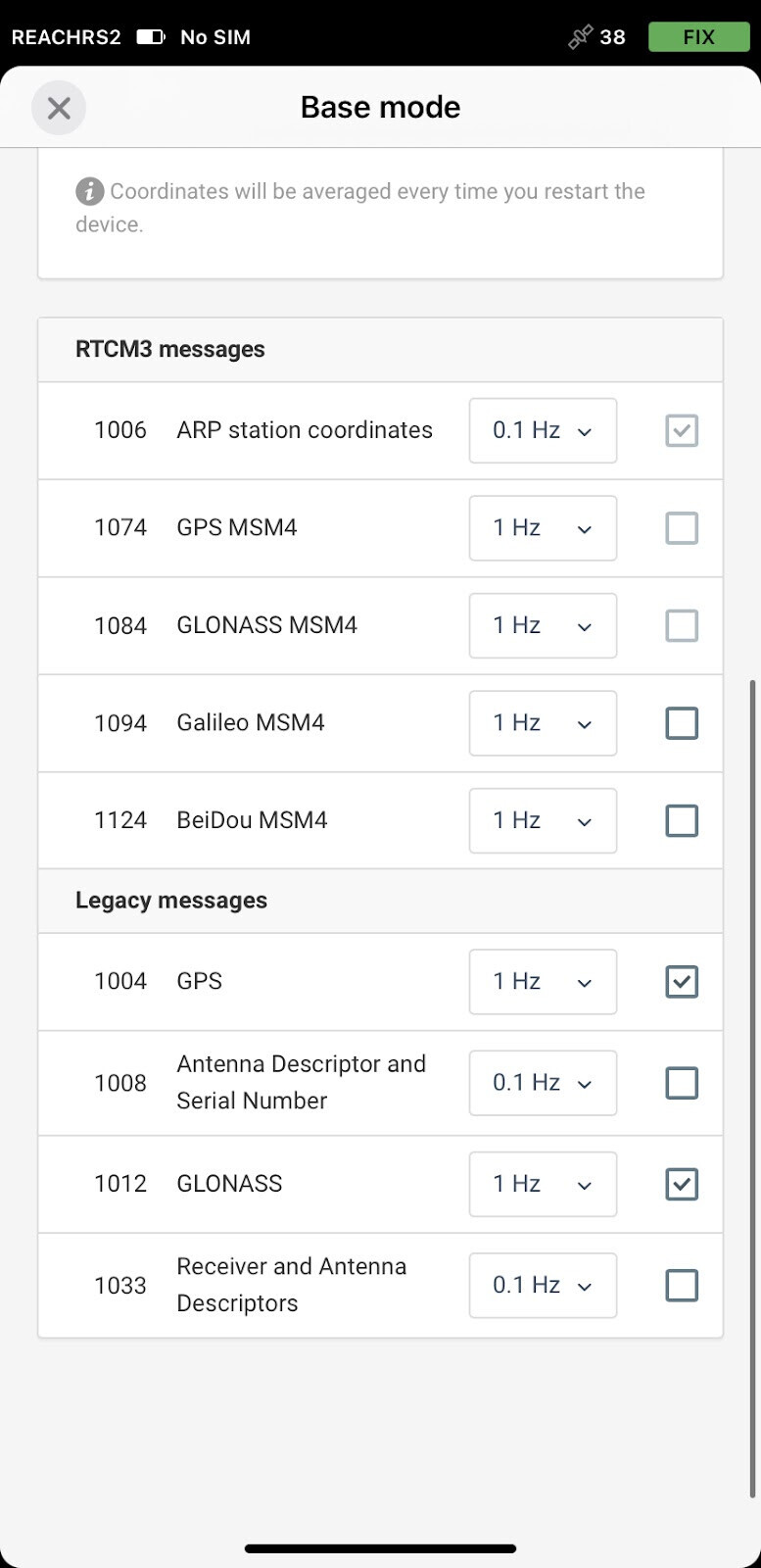
If your Topcon rover supports RTCM3 corrections, it should work fine with Reach RS2+. Here’s the list of the messages it outputs as a base:
You have two options for using a Reach RS2+ as a base and a Topcon Hiper V as a rover:
- You can use a pair of 3rd-party radios to connect both your receivers.
- You can work with our Emlid NTRIP Caster. It’s available for free and works worldwide. This guide will help you set up both your receiver.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.