Today I want to make a guide for absolute beginners to use the NTRIP functionality of Reach. As we know, for RTK to function, real time data must be streamed from a base station to a rover. With the Emlid Reach RS, there are several options for streaming this data, including, bluetooth, serial, local network, and of course, the LoRa radio. The Reach board does not have the LoRa option at this time. There is another option that is also very simple and handy to use for RTK, know as NTRIP. Follow the link for an explanation of NTRIP. http://lefebure.com/articles/ntrip-caster-setup/
This is a good way to send data over long distances because it’s not affected by line of sight or distance. All that’s required is a good data connection and two Reach/Reach RS units.Remember, both units must be on a network with data.
A typical scenario would be your base station at the office on the roof connected by wi-fi to your local office. It could just run continually. This could easily be a lower cost Reach board. Then you could have your RS on site with your mobile phone providing the hotspot. With the network settings saved on your Reach RS. It will be only a matter of enabling your hotspot on your phone and then turning your Reach RS on. Reach RS will automatically find your phone and you can begin surveying through Reachview app. Of course, this tends to use more battery power and will use data as well.
Now let’s get started.
First, let’s look at the settings on the BASE Station. Not all the settings I show in my screenshots are critical and some may be less then ideal. Remember there are many different applications. I am covering one basic scenario.
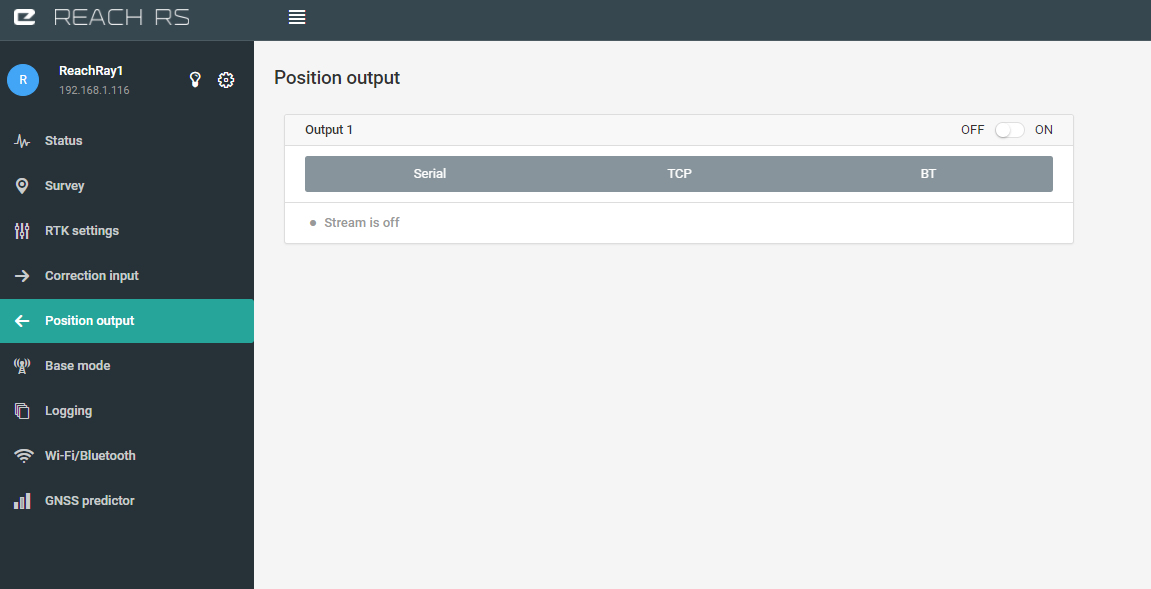
Position Output Tab - Position Output for the base station can cause some confusion but it should be turned OFF as well. Your not trying to output the base stations position, but just the satellite data the base station is receiving.
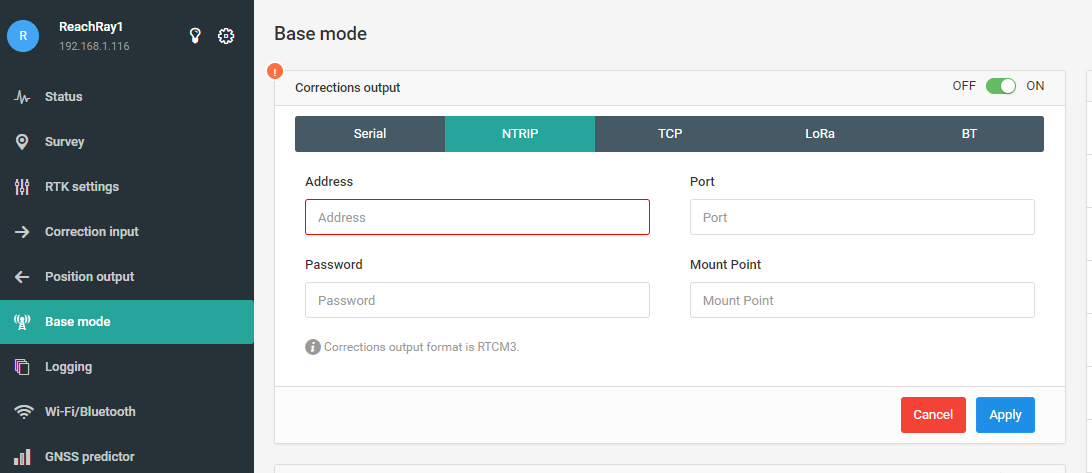
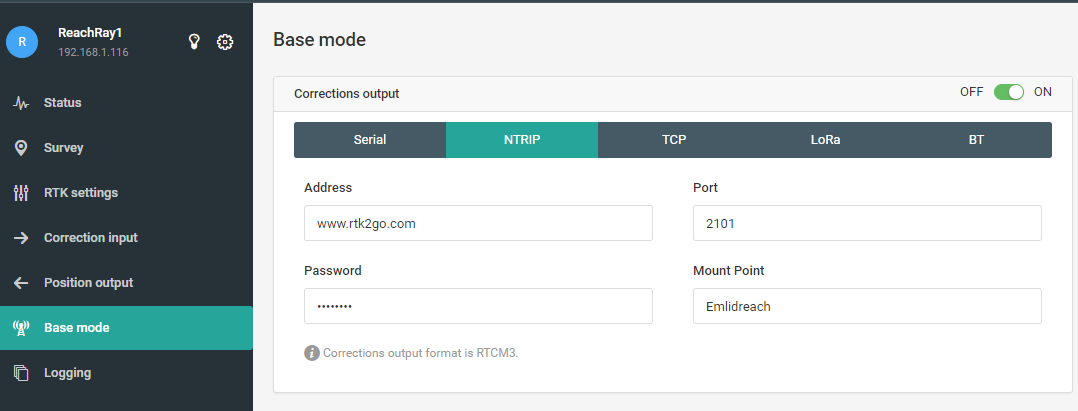
b )Enter the same info as I do for the first three boxes. Address = www.rtk2go.com, Port = 2101, Password = BETATEST, Mountpoint = Emlidreach (Make up your own but right now I’ll make one called Emlidreach)
Now you’re done with the base station and can switch to your rover!
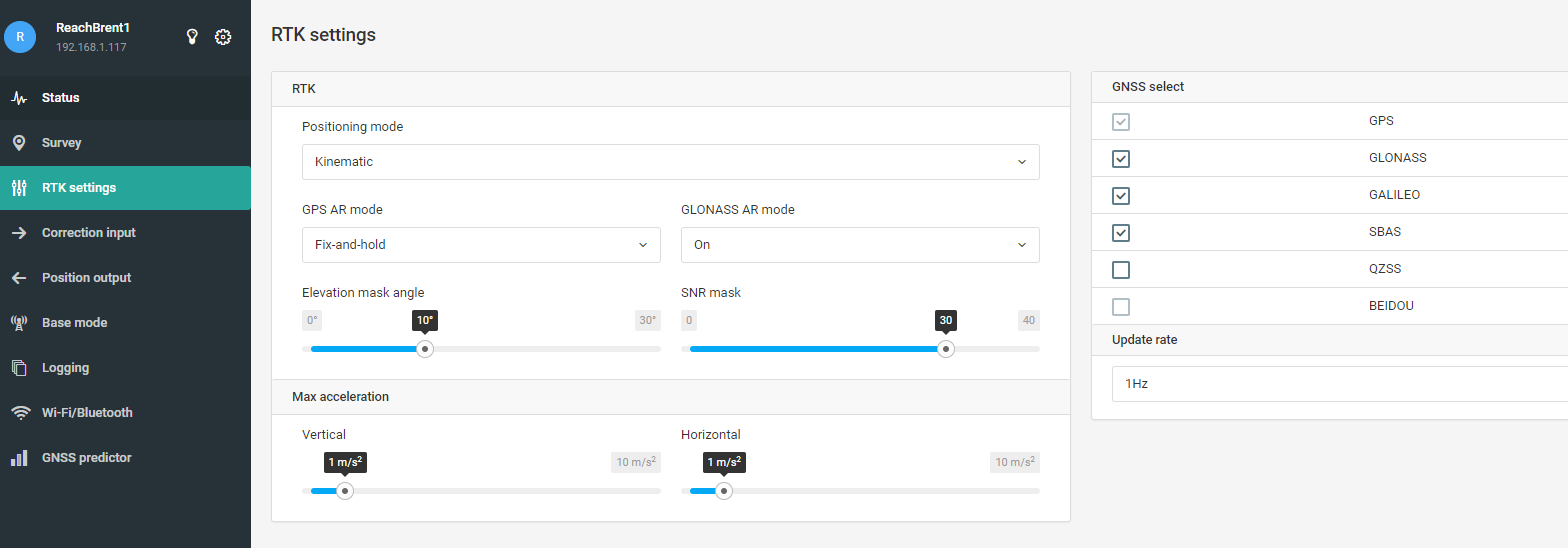
a )RTK Settings Tab. The most important thing here is that Positioning mode is set to kinematic. The other settings are covered in other posts relating to best settings for fixed solution.
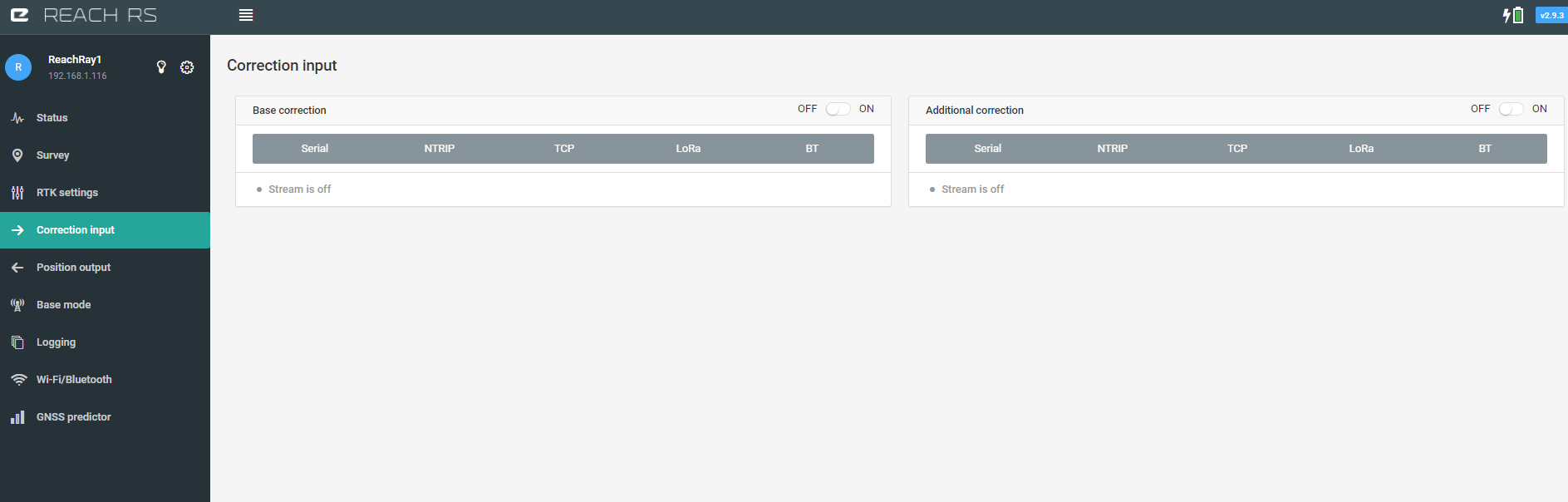
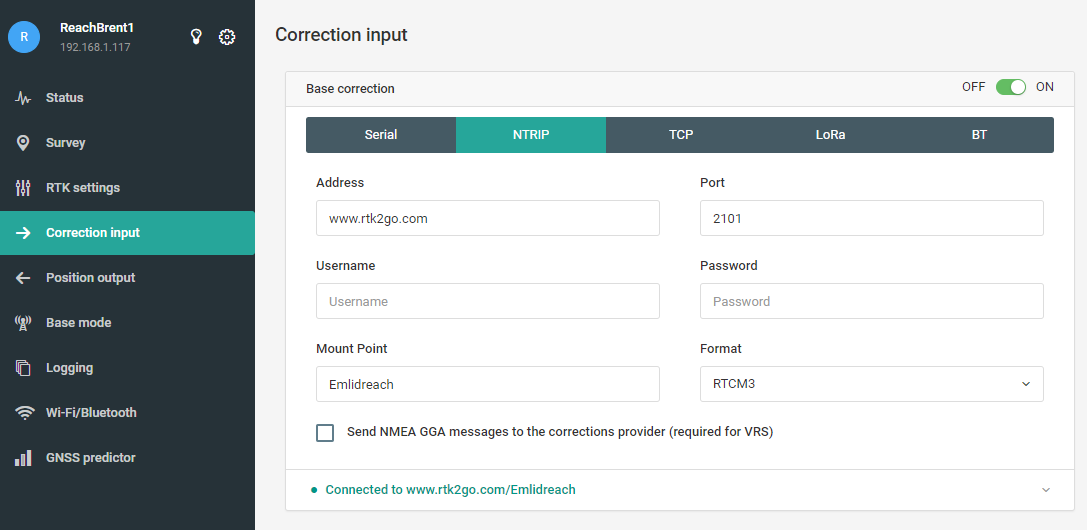
b)Correction Input Tab. This is where the NTRIP data for Rover is contained.Rover settings are as follows.
Address = www.rtk2go.com, Port = 2101, Username can be left blank, Password can be left blank. Mountpoint = Emlidreach (whatever you chose for a mountpoint name on your base station)
That’s it! You’re finished! You created your own free mountpoint and are now streaming RTCM3 correction data over NTRIP.
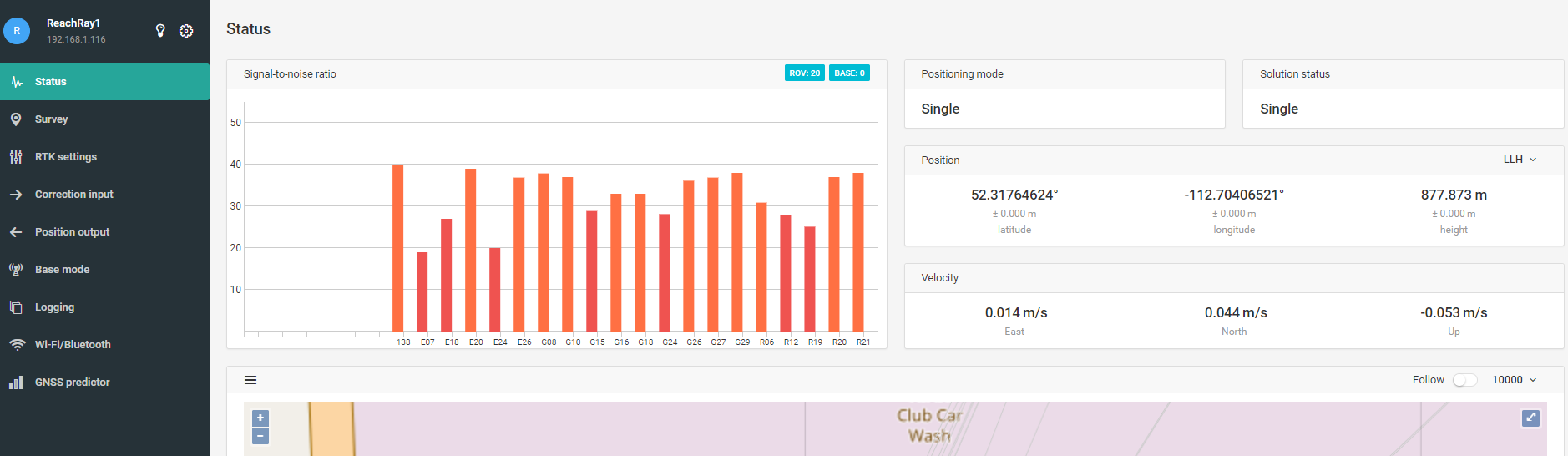
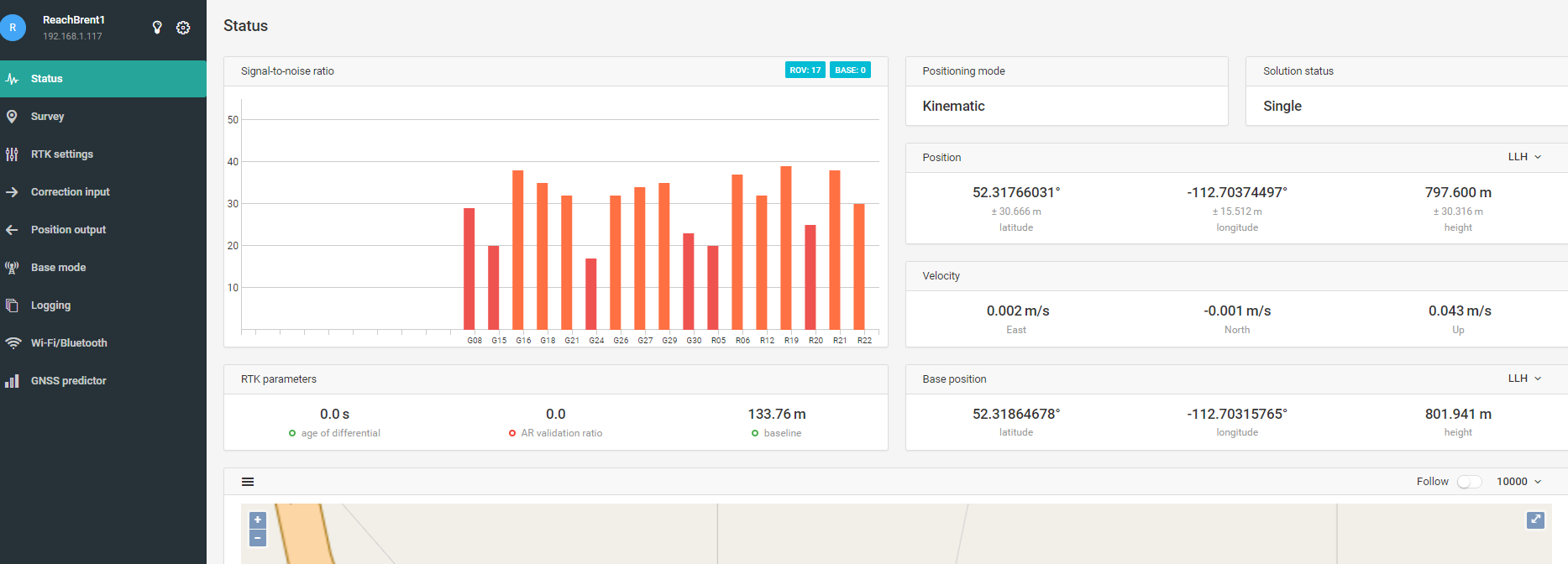
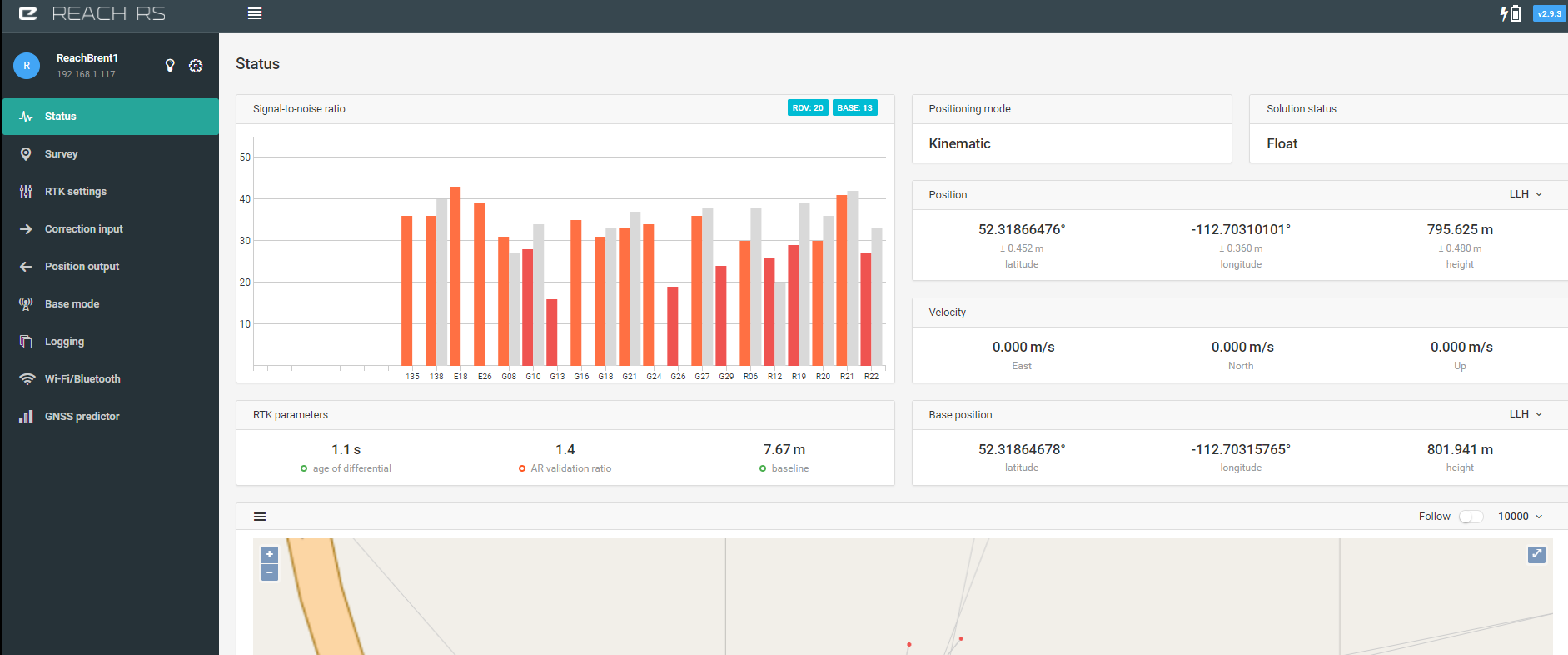
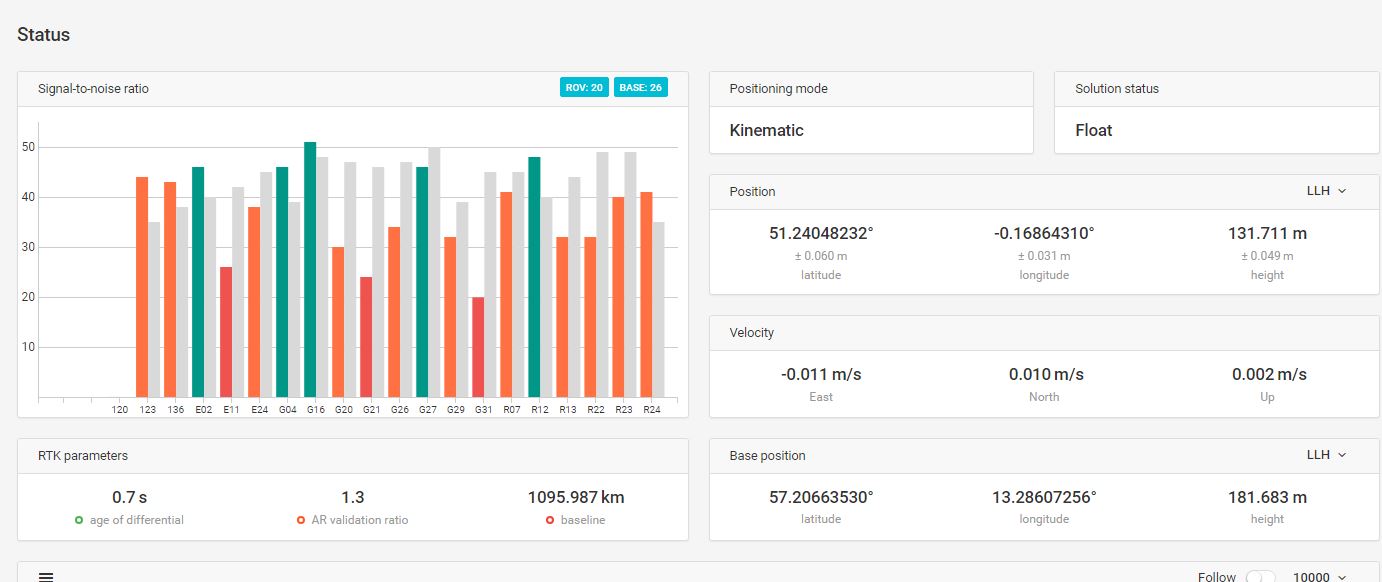
Let’s look at the Rover Status now to make sure our correction data is actually coming through. The grey bars show that it is! I’m indoors so satellite visibility is terrible but we can see the settings are correct.
I have found that www.rtk2go seems to experience some down time. I used it because it’s free and simple to use. Sometimes on your Correction Input tab you’ll see a dropdown menu showing all the mountpoints available. Today it said the list wasn’t available. There are other correction services available where you can use either a public or paid service and eliminate the need for your own base station. You can also create your own NTRIP caster, but then your’e probably not an “absolute beginner.” Hope you found this helpful!
So generally, using NTRIP would provide correction to a rover without need of subscribing to a CORS station using one’s own networked base or the networked base of another?
If using one’s own base, how does it determine it’s “true” location when you don’t specify it? Why doesn’t it just send out where it thinks it is which is wrong. I’m not understanding why the base which isn’t necessarily on a know location can be used without correction.
If using a service like youcors, wouldn’t there need to be a base station in their network that was near where you are surveying to be of use?
All NTRIP should be thought of is a way to transfer correction data over internet. Also it is a simple way to allow many rovers to access one base station.
Your base station location will be as accurate as you set it. For absolute accuracy your base needs to be positioned accurately. This is no different using NTRIP than Lora or something else. With a service like youcors you would need a base station within the acceptable ten kilometres. This could be your own or someone else’s. If the survey site is farther you could still probably make it work by bringing a base station to the site (let’s say thirty km from cors base) and then connecting the base station to cors via ntrip and averaging the fix for fifteen minutes to get highly accurate position of base station. Then your base station would in turn provide high accuracy absolute positioning to your rover. This would save you on data and would still make longer baselines from cors station possible. I’m interested if there is contrary opinion on this.
I know I"m missing something simple. But in your setup screen shots, you do not set anything as far as the base. How does it know where it is any more than any other gnss receiver?
My Reach kit is still enroute and I haven’t actually set up anything myself yet. I just assumed that when setting up a base on a known location, you would actually need to enter that location in the base.
Also, Rtk2go says that by using their service, you agree to share your data. How do you see what data is shared by others and if there is any close to where you are operating?
You have several basic options for setting up your base station position.1. You can set it up over a known point and manually enter its coordinates. 2.You can just turn it on and it will average its position for a preset amount of time. This will only provide moderate absolute accuracy for your survey. Accuracy relative to the base station will not be affected. 3.You can set your base station up as the rover while establishing its position and receive positioning information from another source such as cors. This fixed solution can also be averaged, providing you with highly accurate positioning for longer baselines.
Reachview opens up a list showing all available mount points on the ntrip caster after you connect to it. I would personally like to see them sorted by distance from you and then you could always select the nearest one. Then someone could make their own ntrip caster and we’d all have to verify the accuracy of our own base stations before we could use it for transmitting corrections. This would provide people all around the globe with access to high accuracy correction source for free.
This would be awesome. I would buy a few extra modules just to mount on certain areas. Such as my roof, and my work. They are 14miles apart, I’d be covered everywhere around town.
1 - I can buy a second Reach and make it a base (to obtain the main GPS location)
2- Or I can use a free or paid Ntrip service and ONLY need to use one Reach RS on the field.
Excellent information. Thanks for sharing. I’ve a small query. I want to use one Reach module as a base with internet connection from my office WiFi and use another Reach module(rover) in a drifter that floats in near coastal region. I want to transfer the corrections using your technique in real time. But the challenge is I cannot keep my mobile along with it (for hot spot) due to size limitations of the drifter. I want to use a data card that can be connected through usb. Is it feasible? Pls suggest. Are there any other free ntrip service providers?
hello,
I want to achieve exactly what you described,
Already bought reach RS and I want to use it as a rover with corrections from a paid or free Ntrip service.
Any chance to give me the right steps/settings?
Thanks
hello,
I want to achieve exactly what you described,
Already bought reach RS and I want to use it as a rover with corrections from a paid or free Ntrip service.
Any chance to give me the right steps/settings?
Thanks
Hello, In this case you should be able to just follow the directions for the “Rover” from the tutorial but instead of entering the settings created for rtk2go, you will need the settings from your NTRIP provider. Your first step should be to decide which provider you’re using. Then get the settings from them. We can help you enter those settings into your rover, but you need to get them. Best of luck!
i am using youcors.com and my location is London.
I create account with youcors and i have my user name and password
what else i need regarding settings
i managed to create a mountpoint but i cant get connected
I can get connected to am.youcors.com and to a public mountpoint burserydSwe but not to the one i created. Maybe i am not entering the correct settings for London area like Long and Lat.