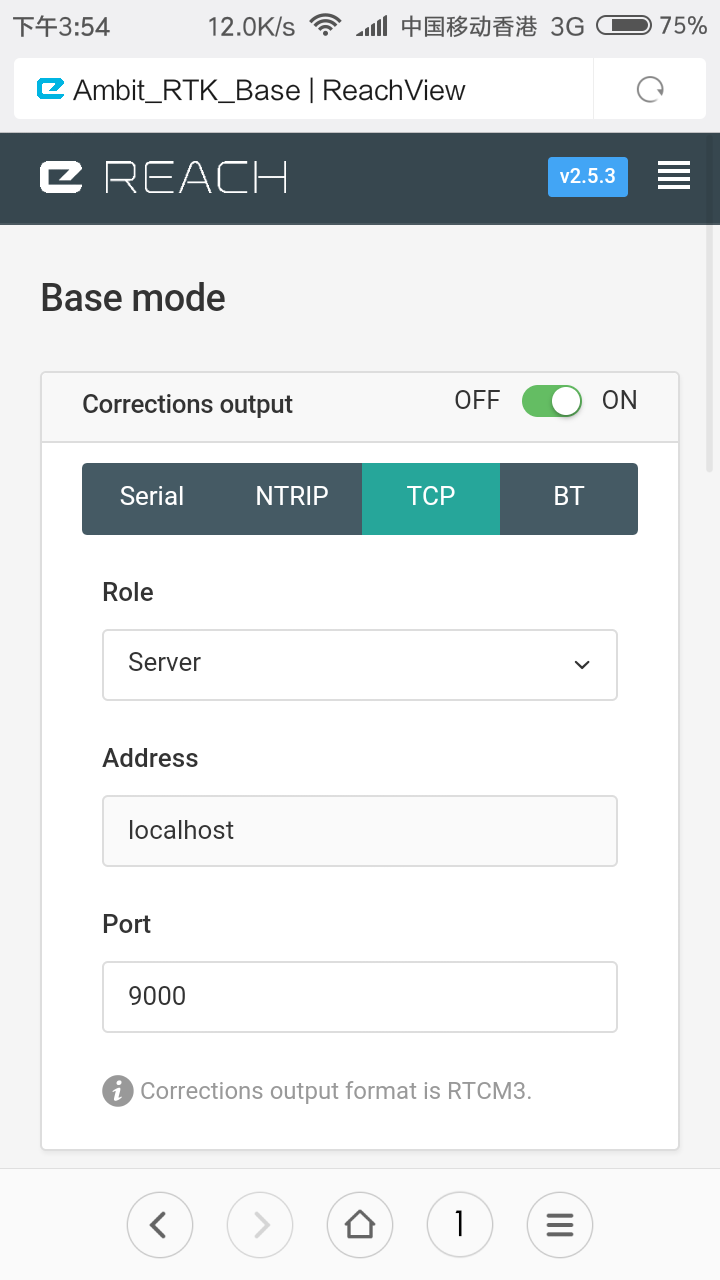
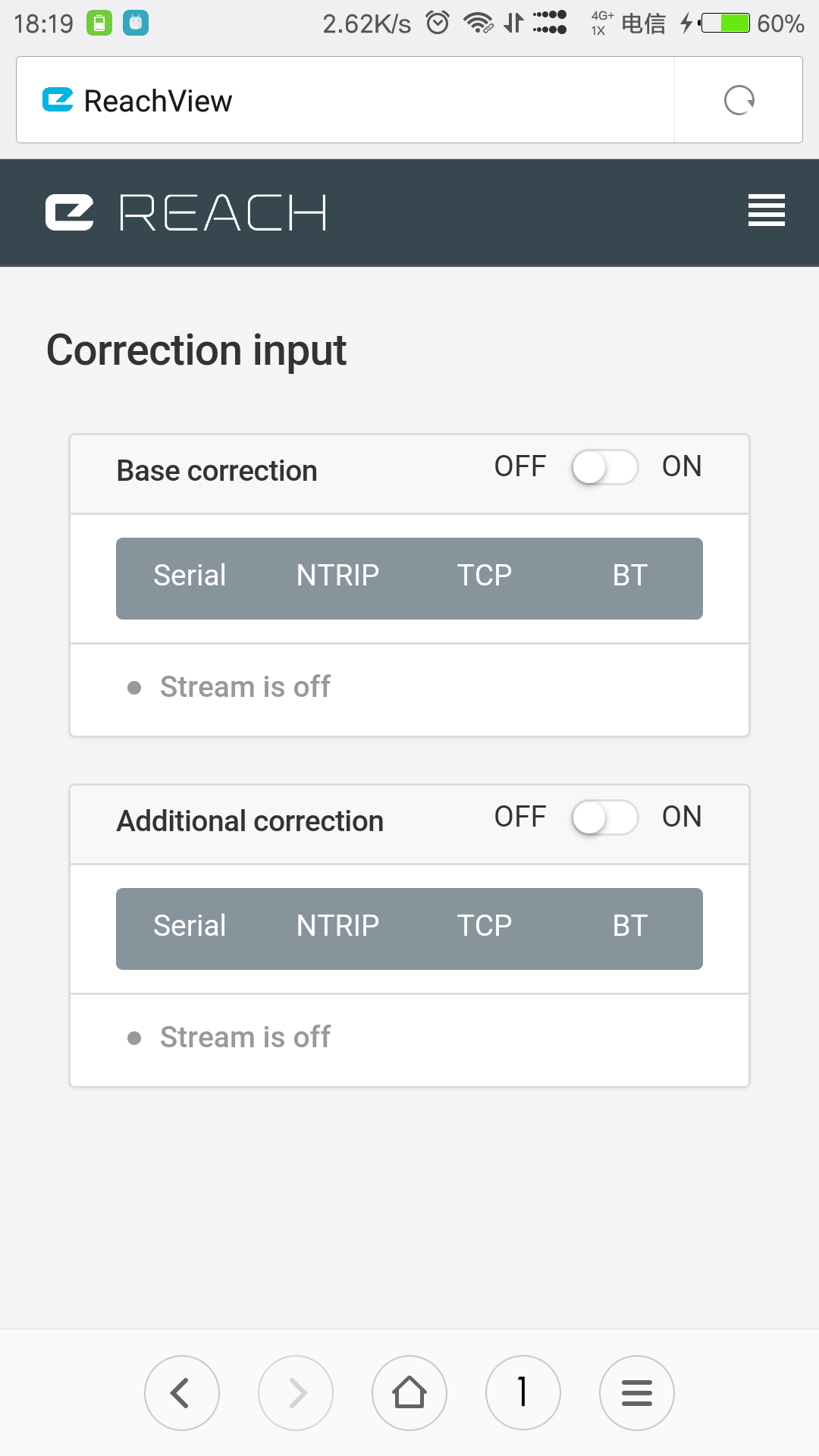
i used 2 sets of reach . one as base connected to PC, the other as rover connect to Pixhawk . the correction date are transfered by serial ports . setting up as your document instruction.
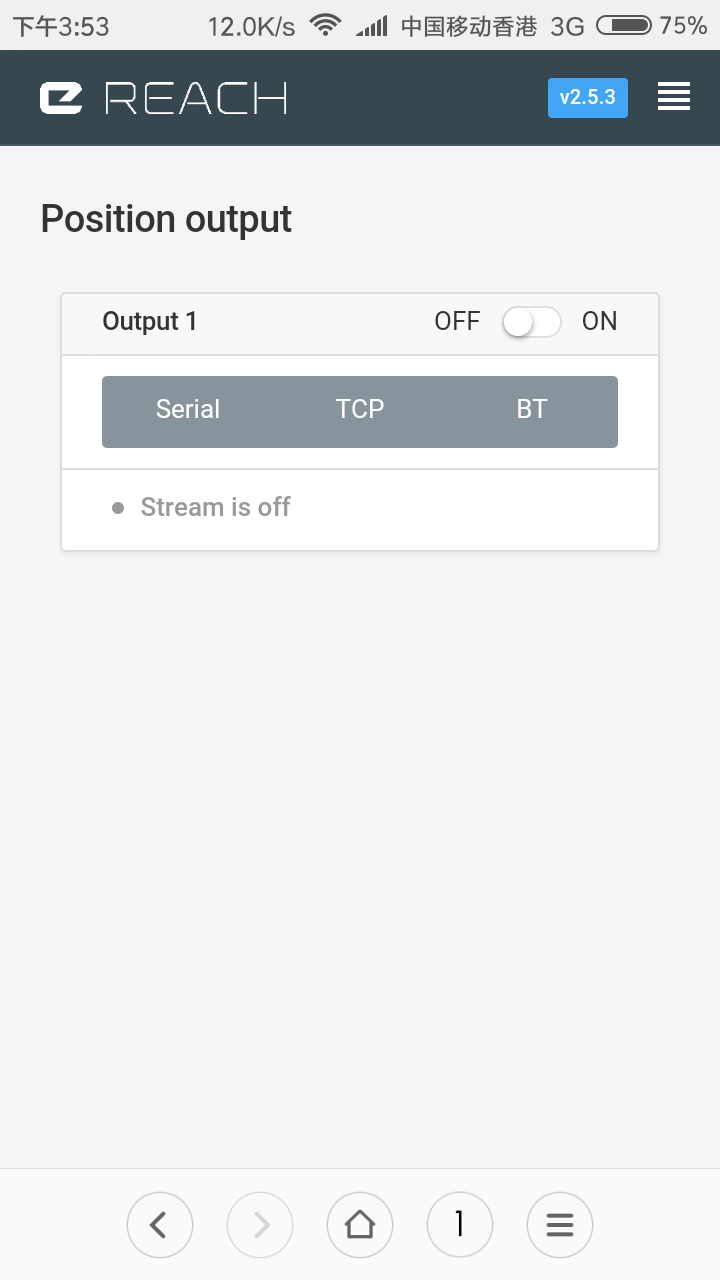
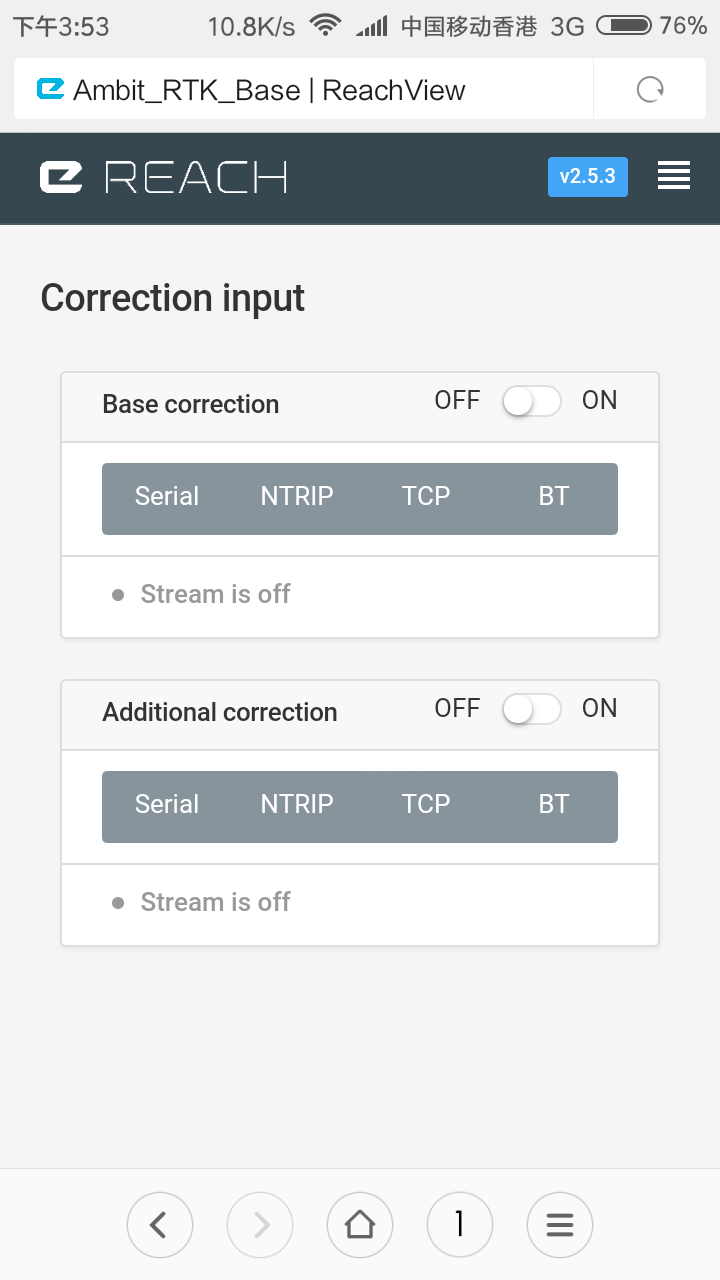
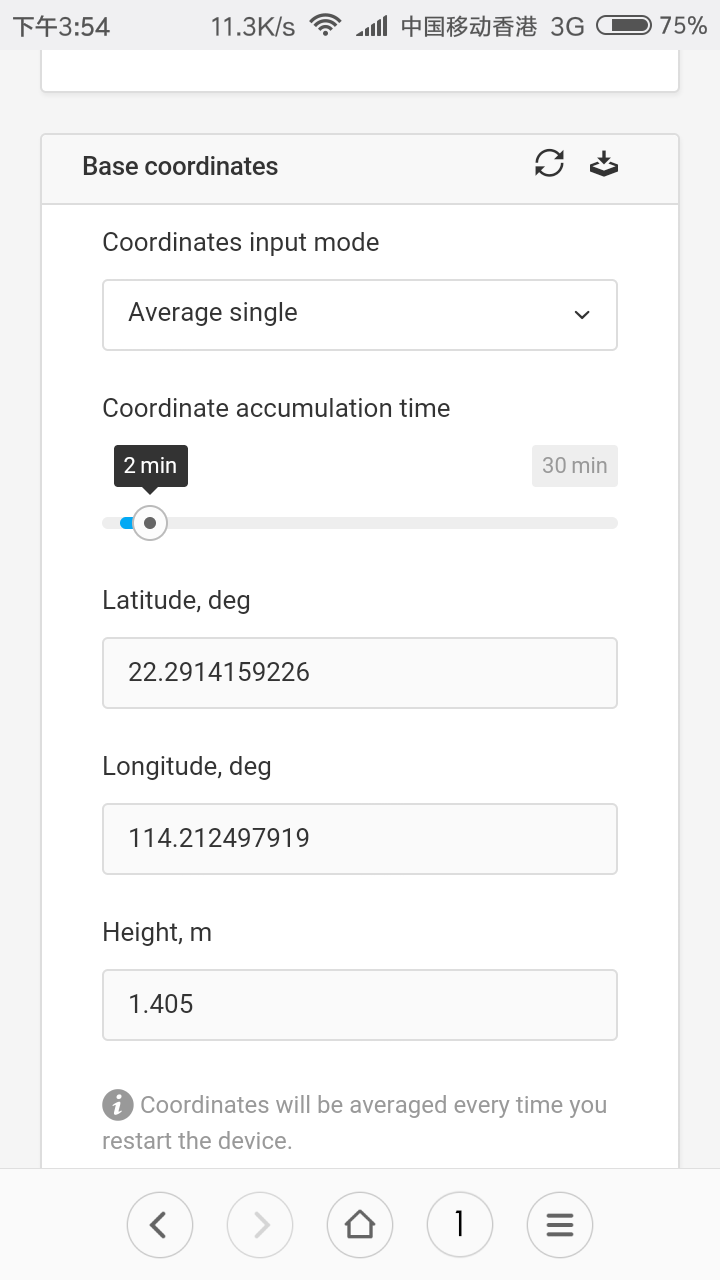
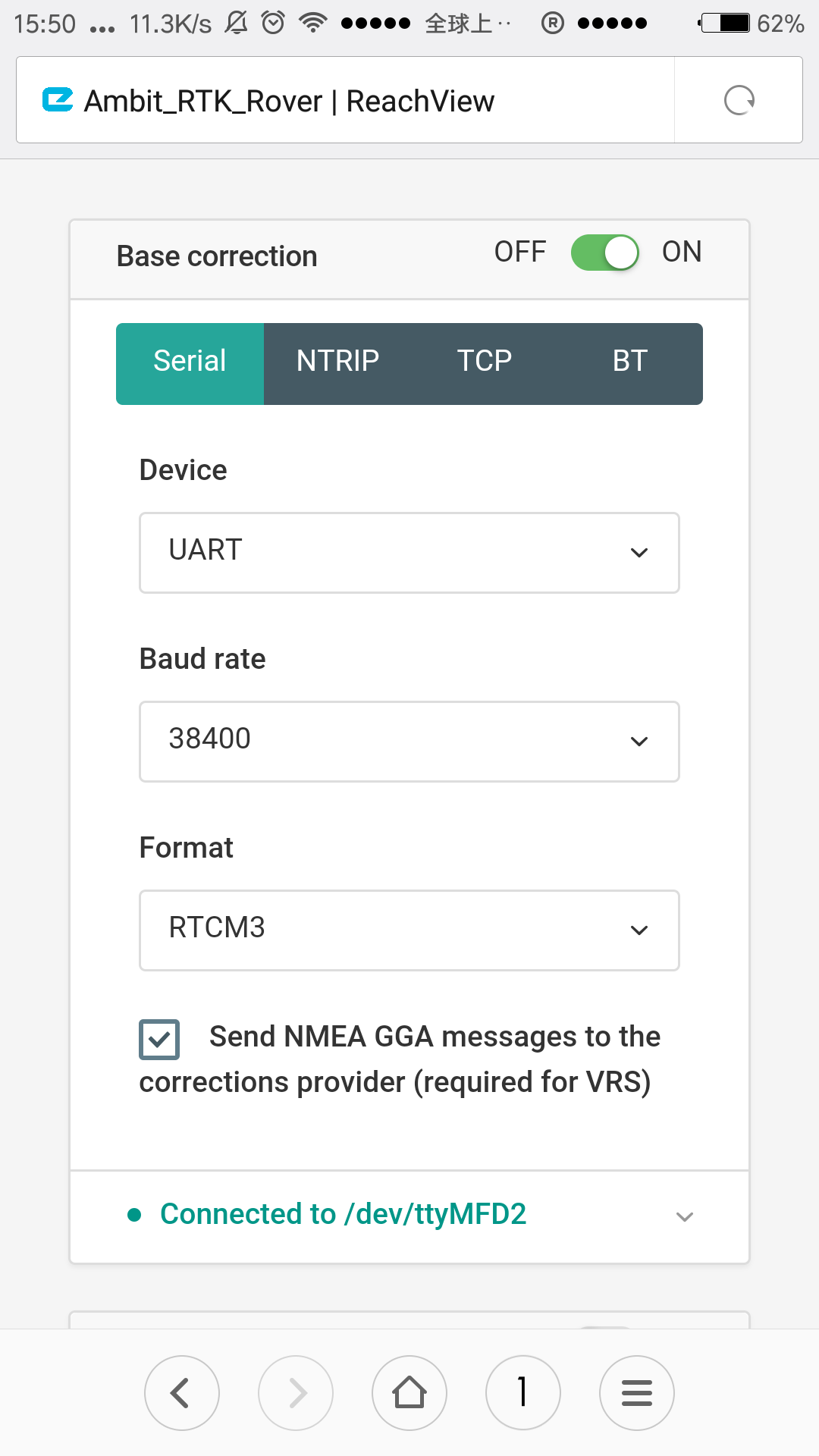
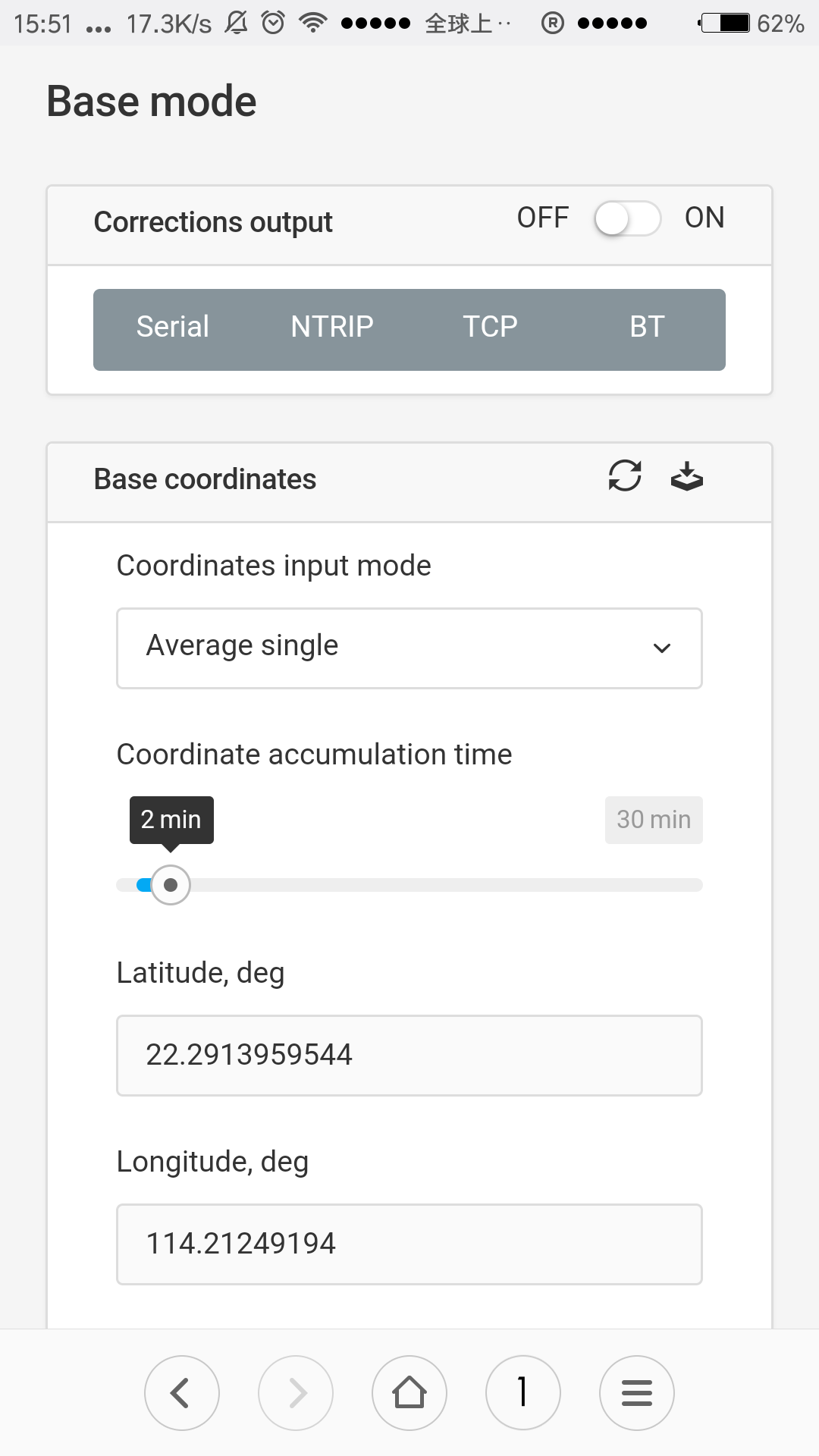
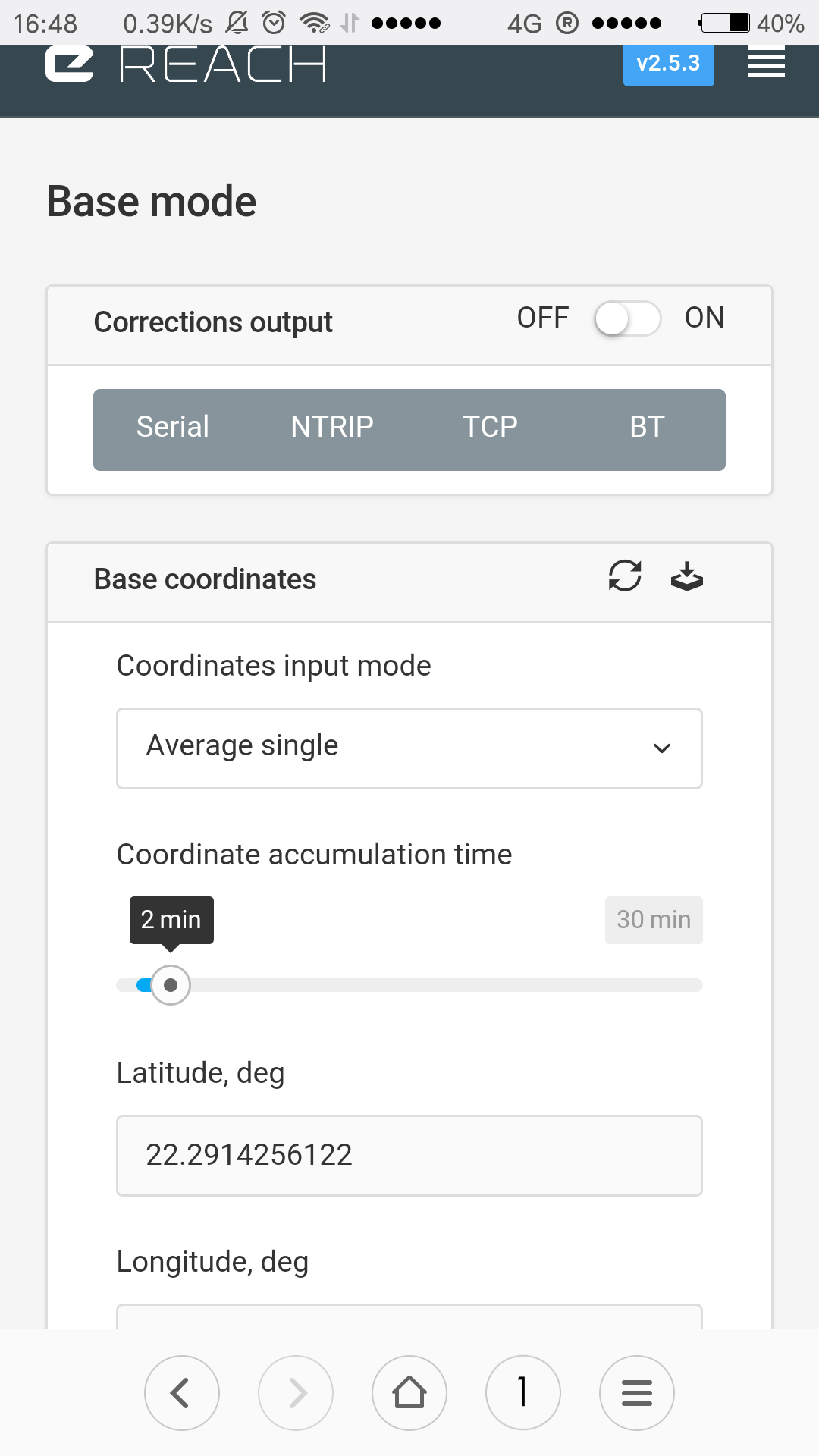
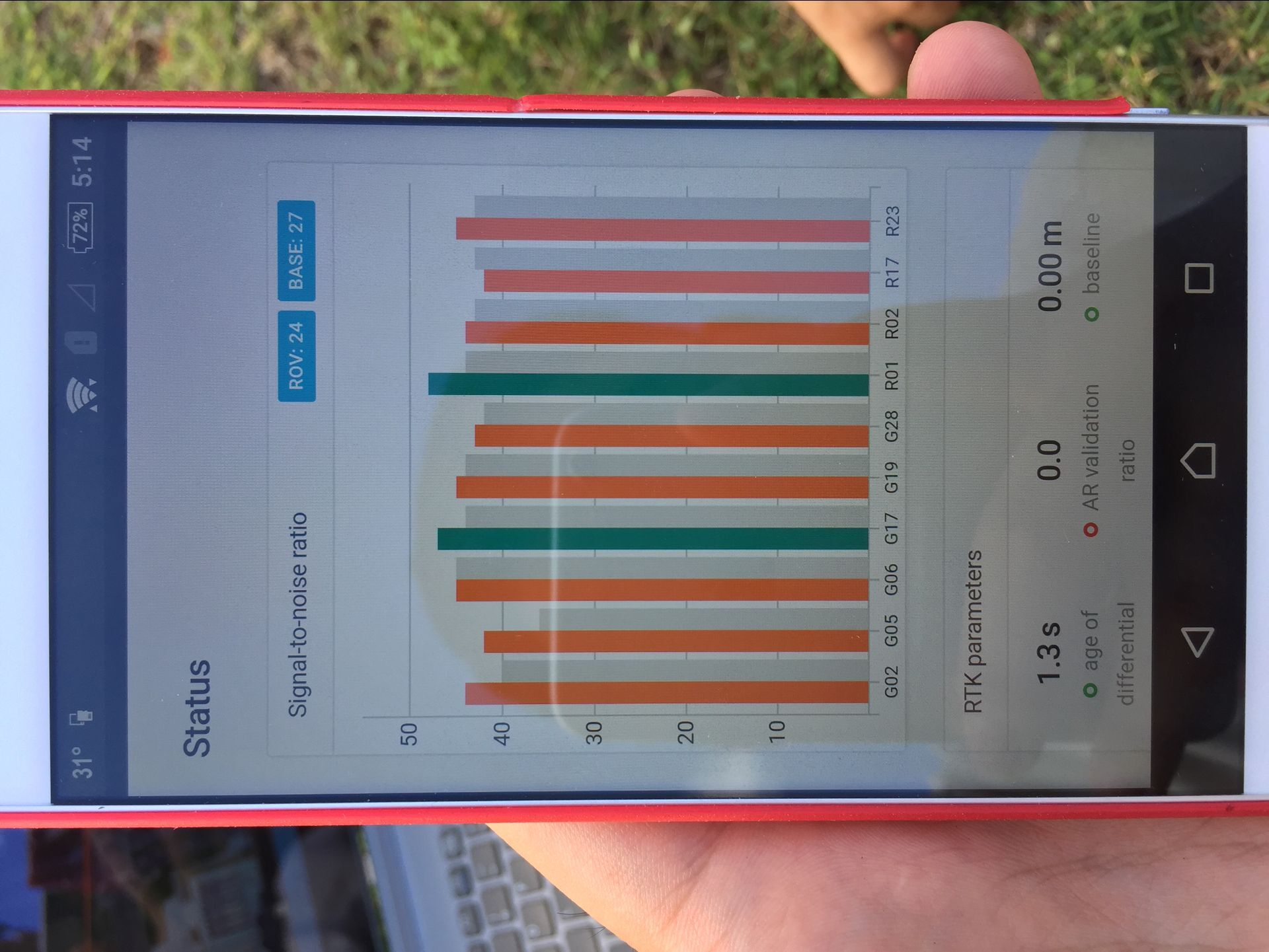
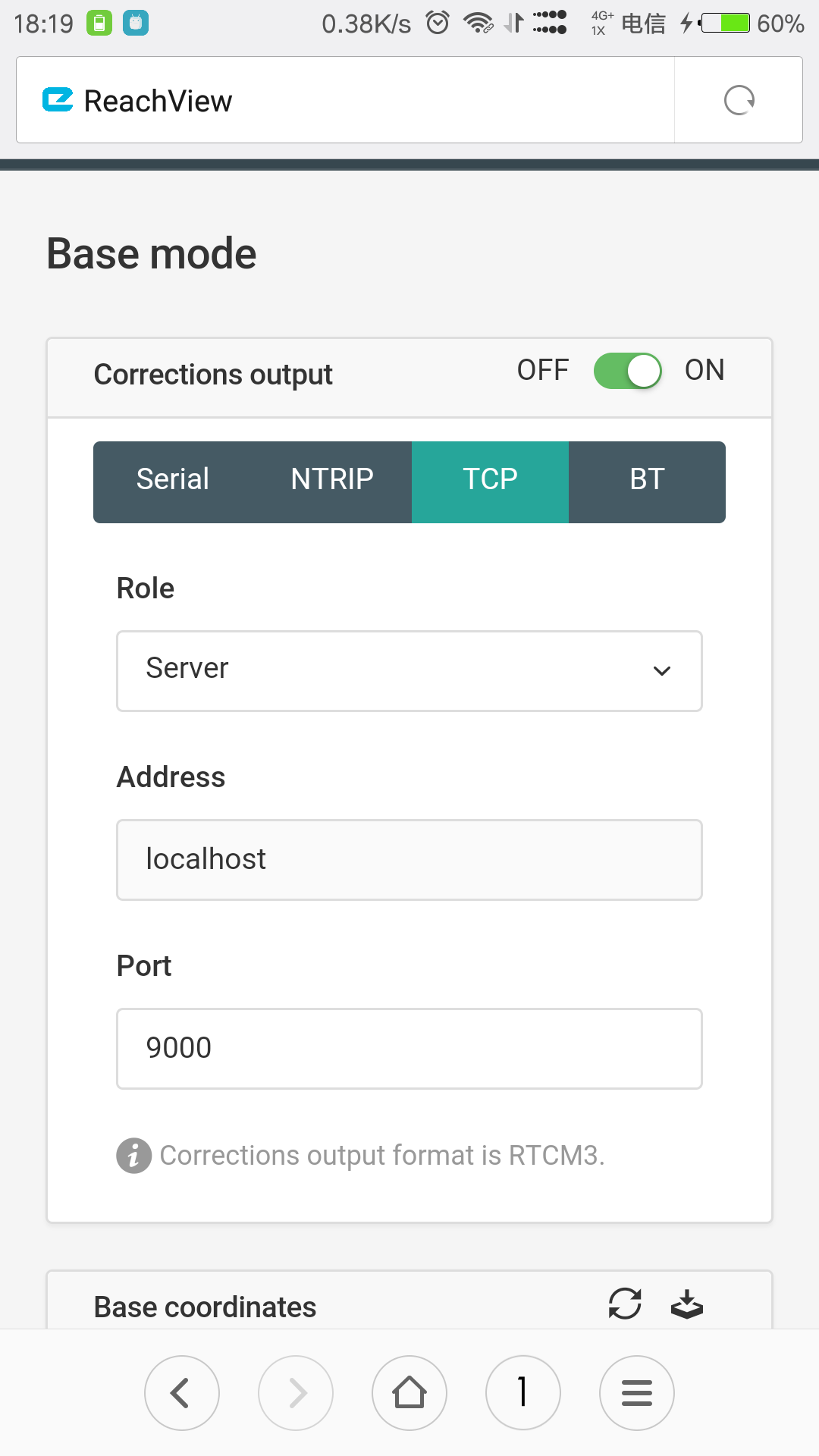
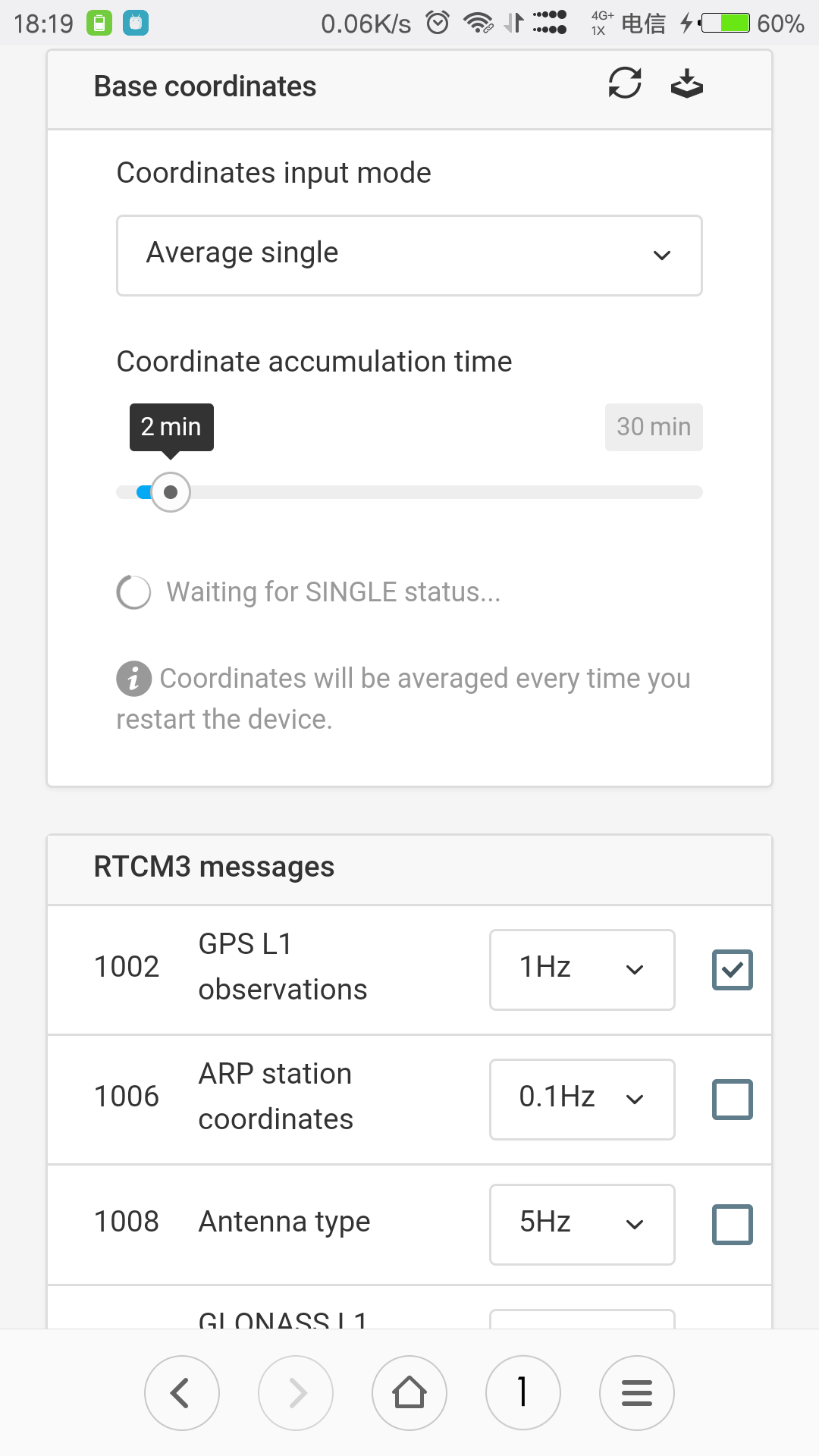
here are some sceen dump of base for your reference .
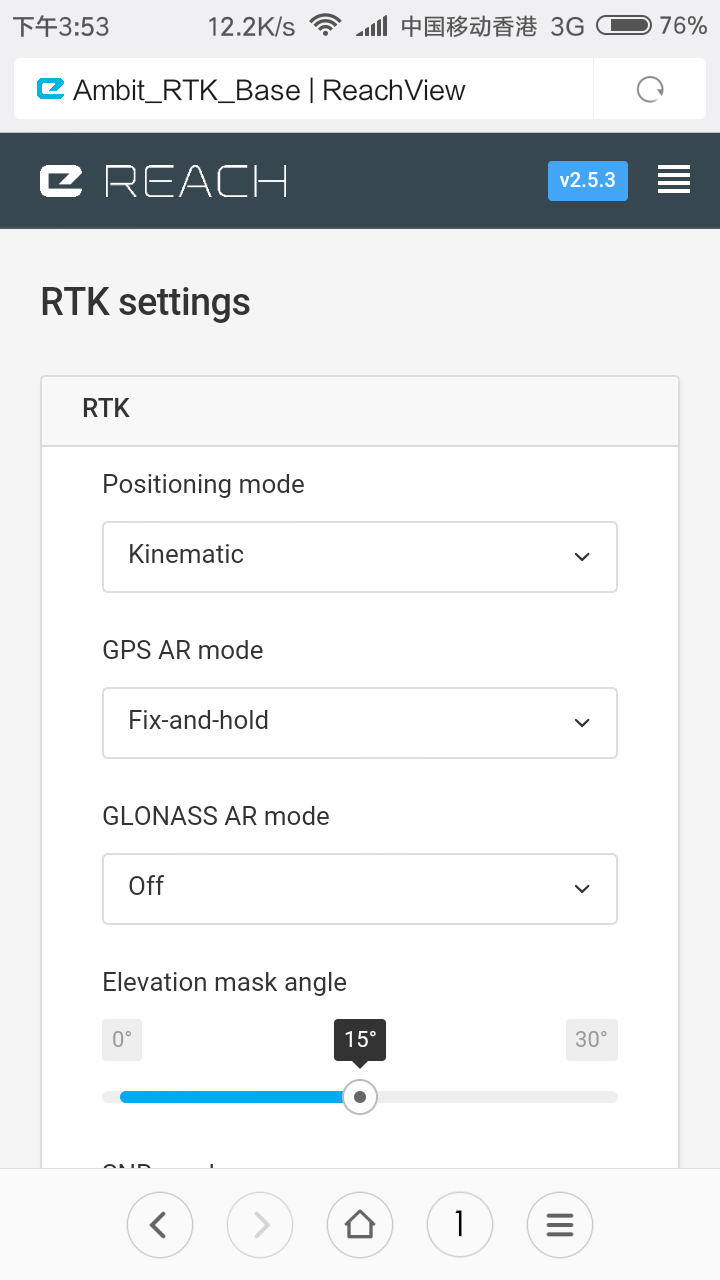
i tried to change the parameters
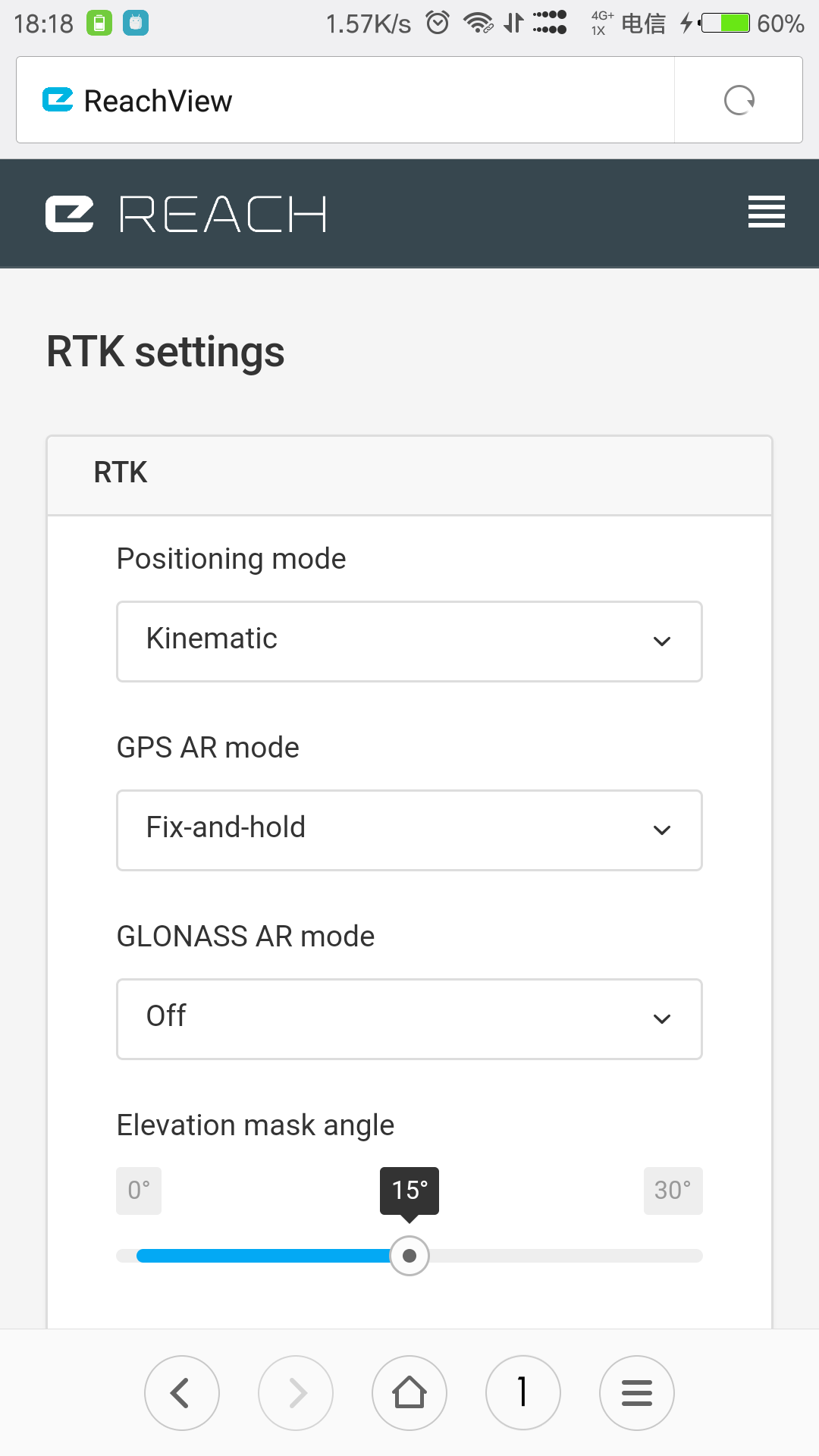
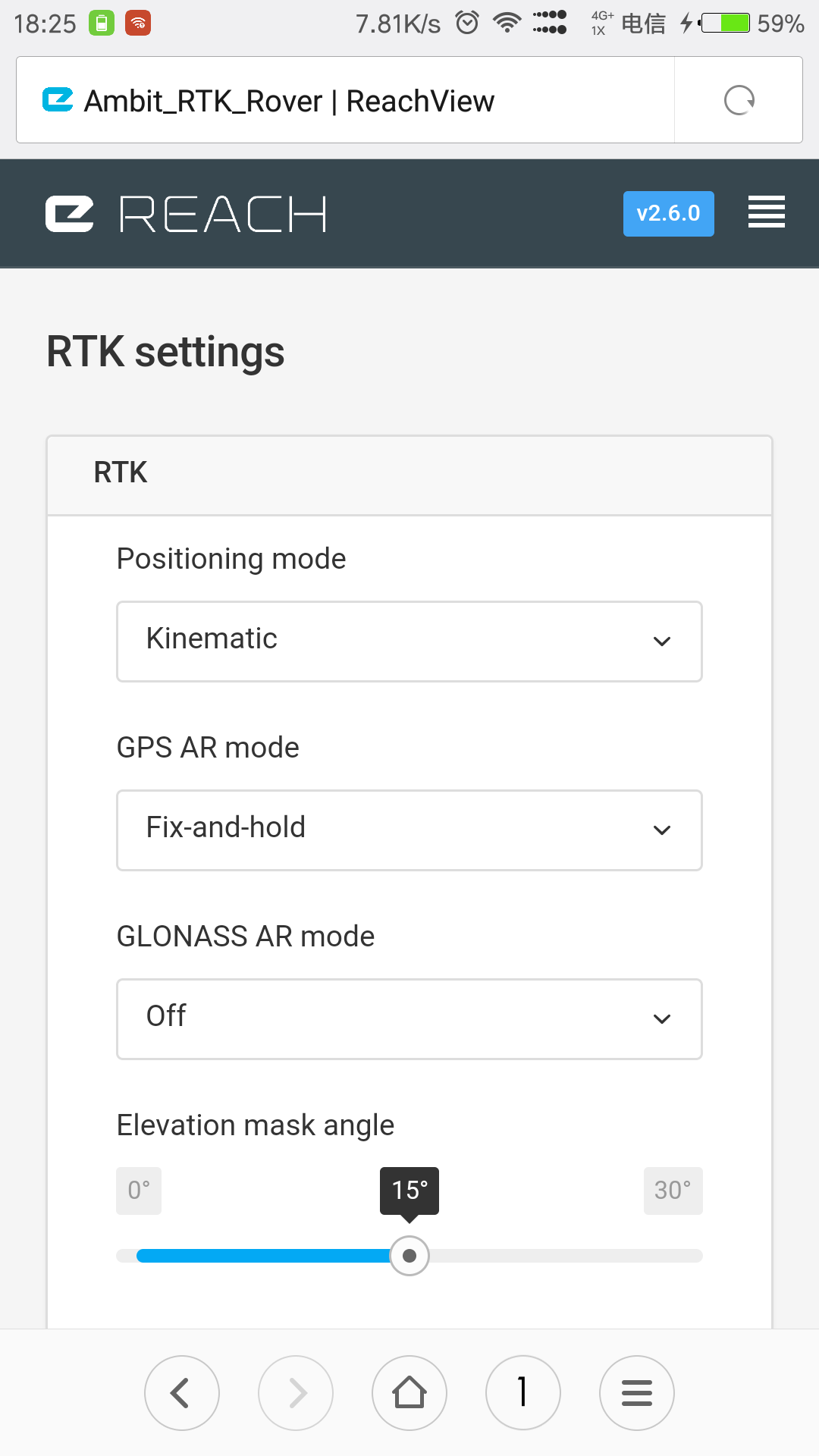
for instance RTK Positioning mode, base static ;rover kinematic .
base kinematic ;rover kinematic . base static ;rover static .
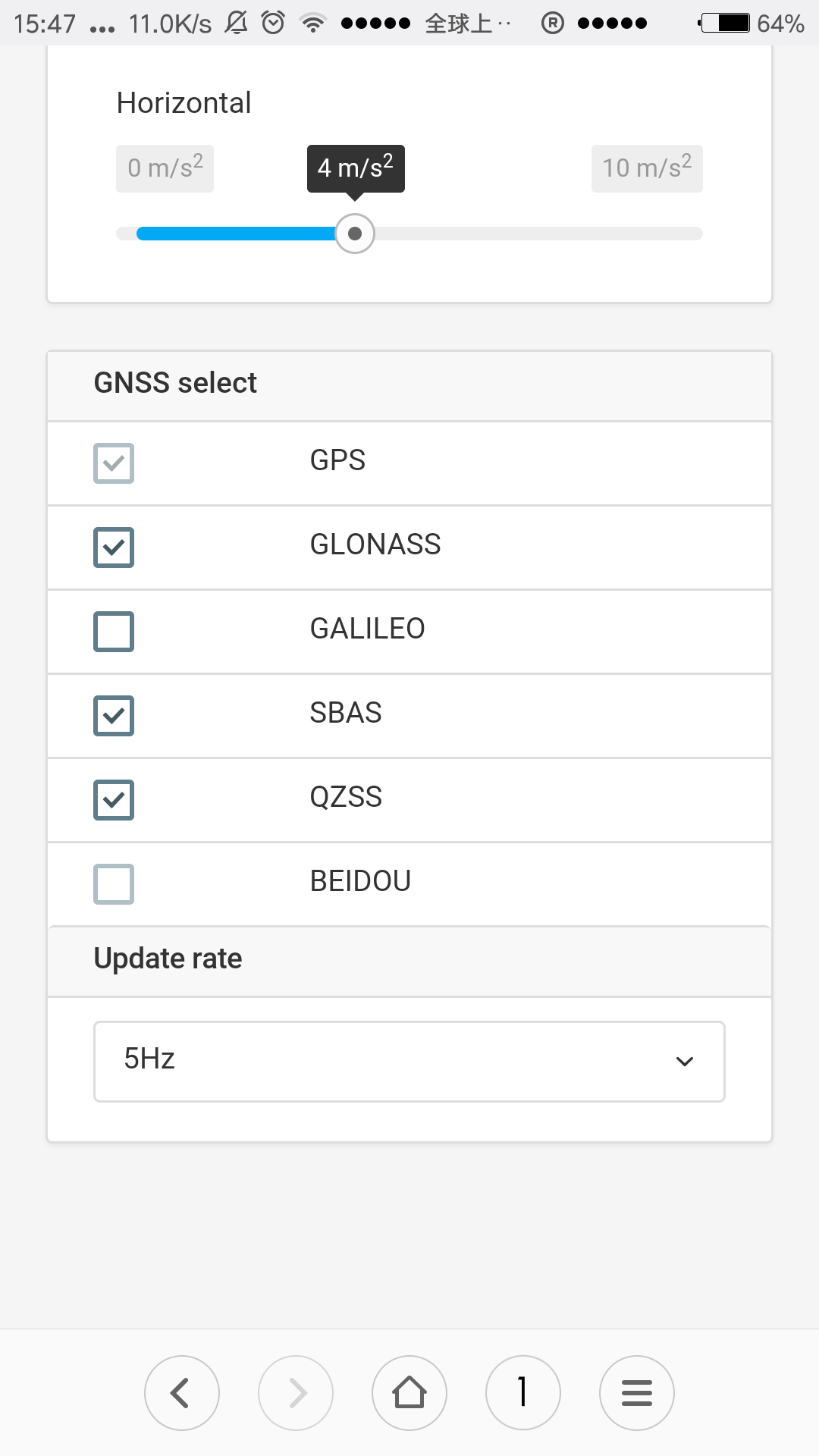
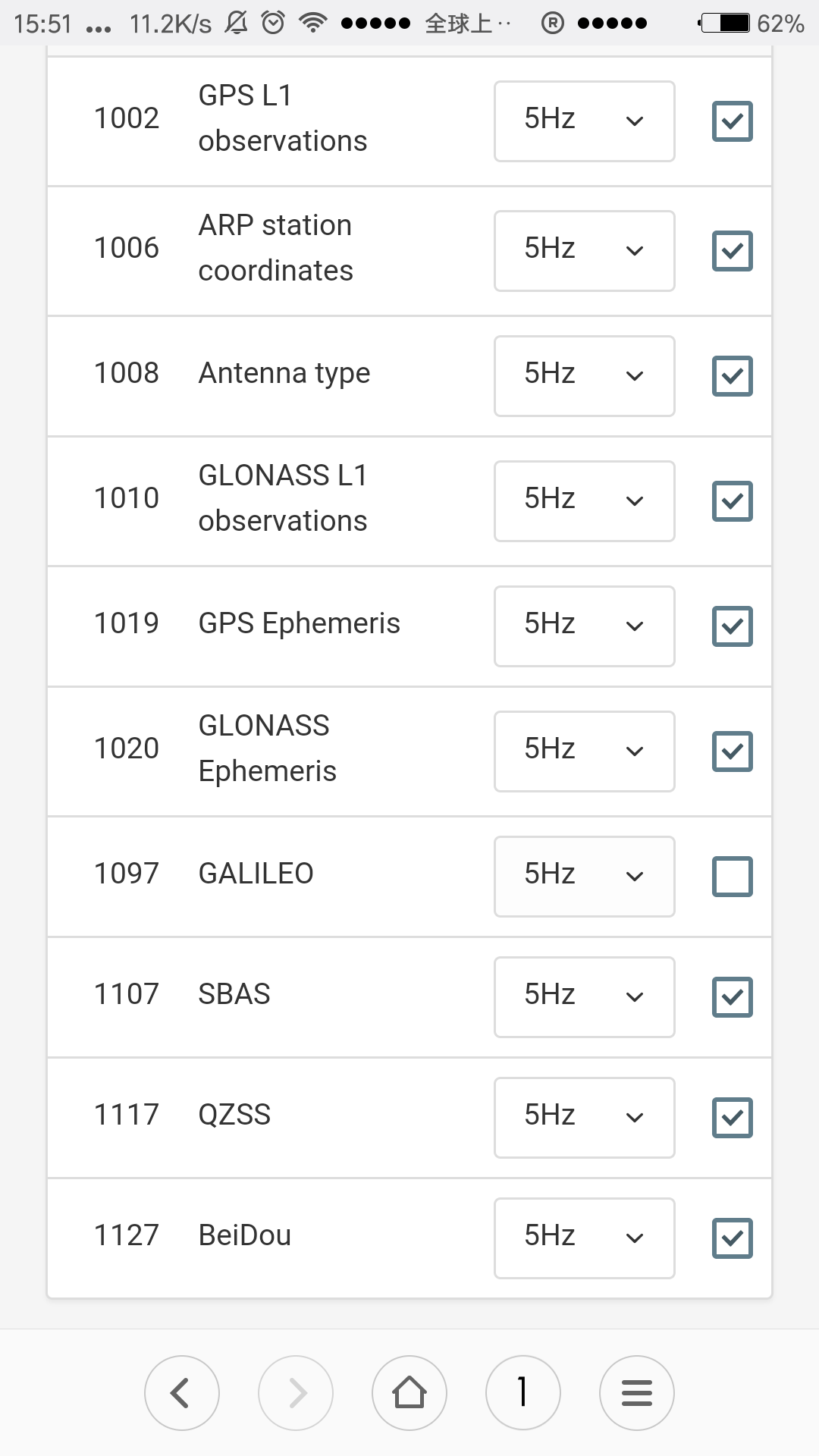
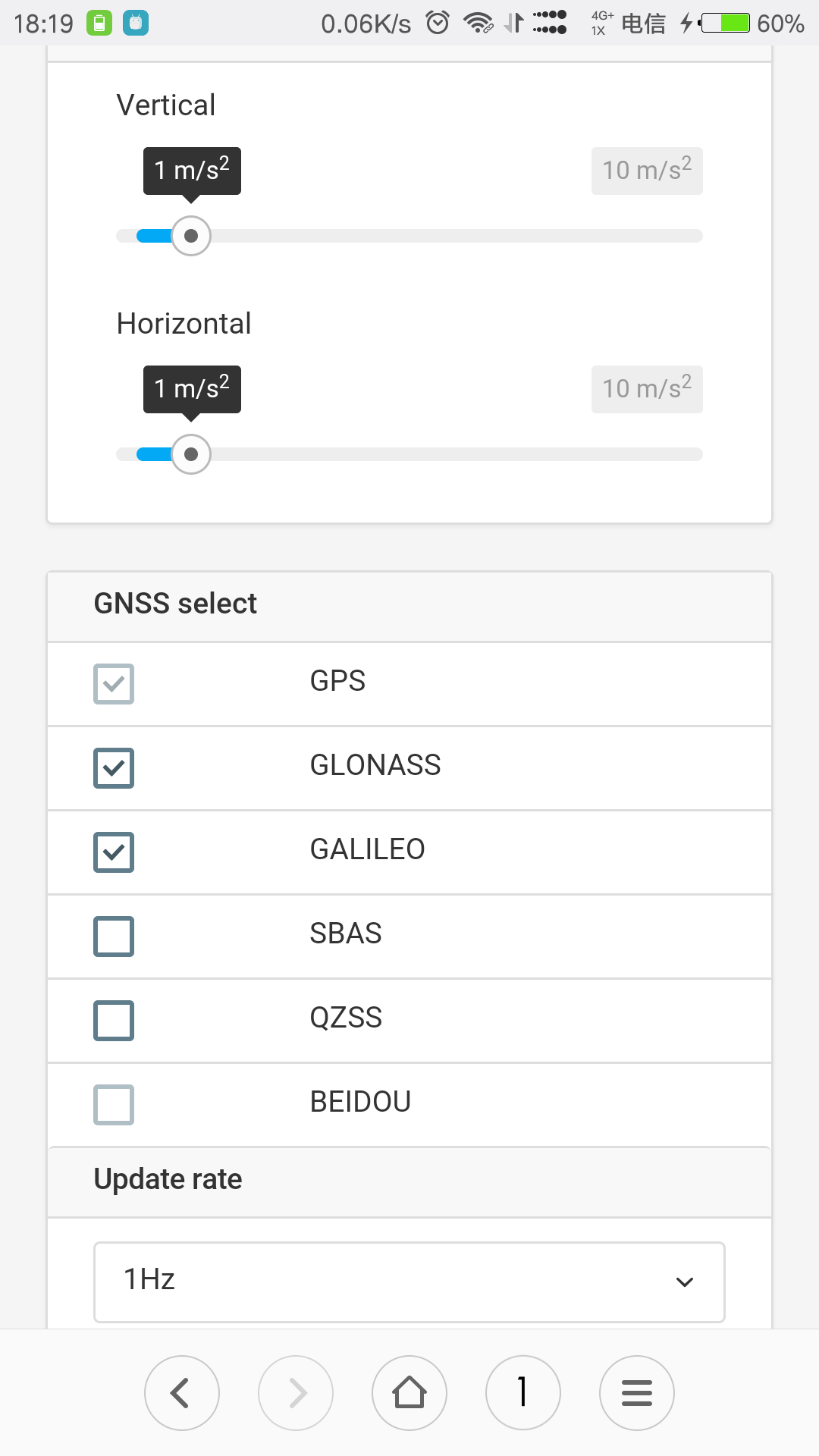
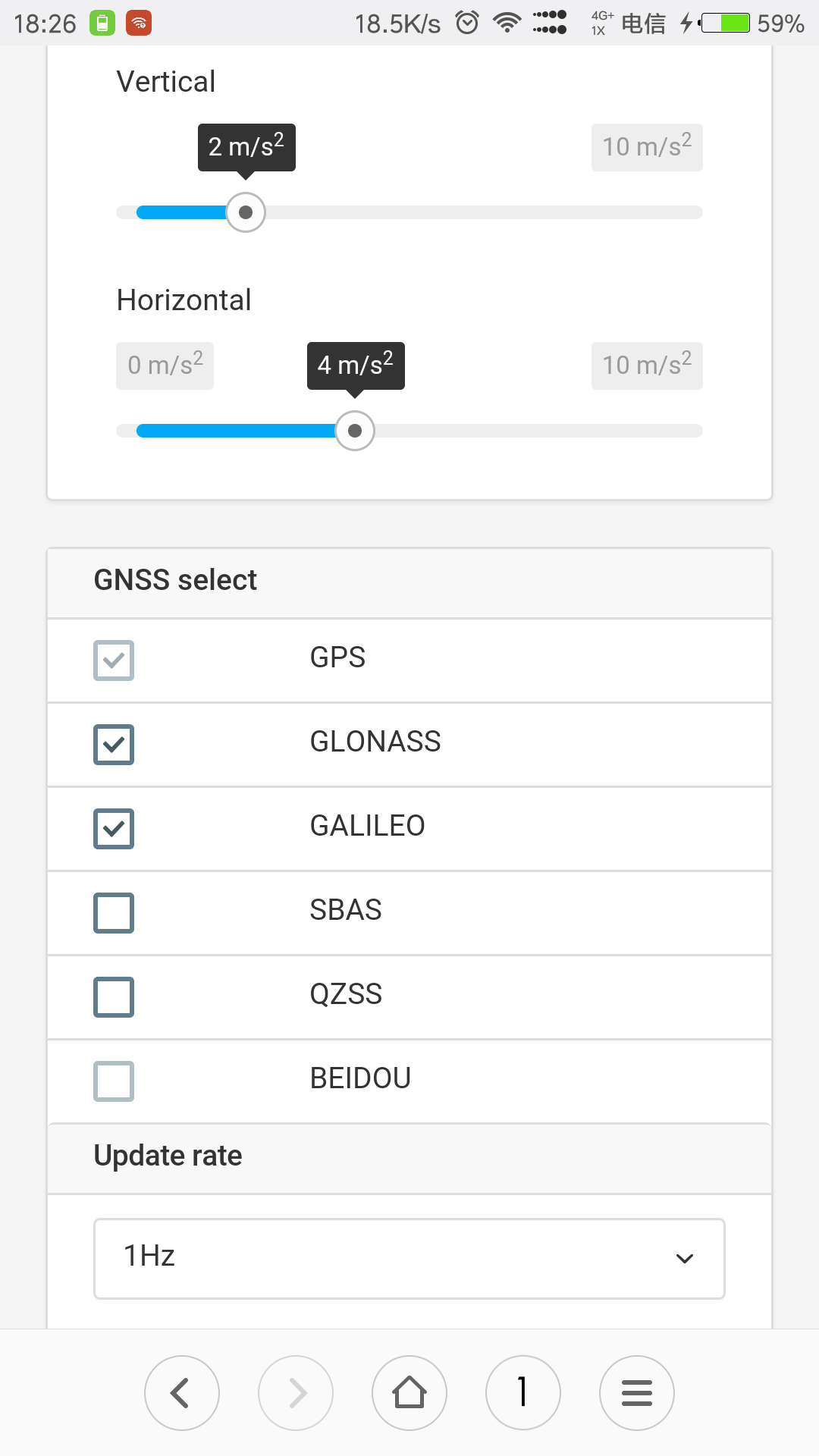
tried to set the GNSS update to 5 hz or 1 hz or 10 hz
model selection 3 types as your document instructions .
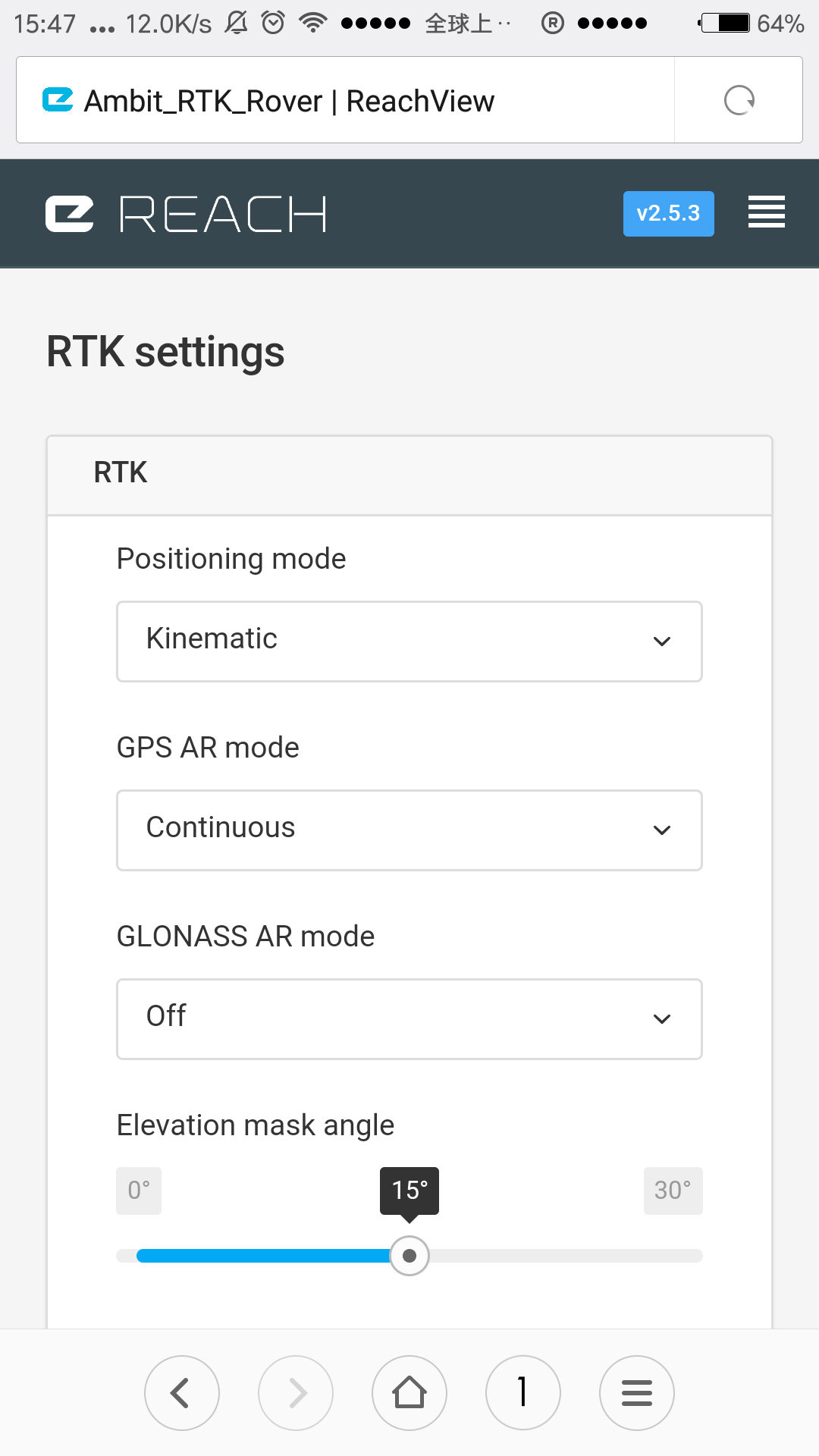
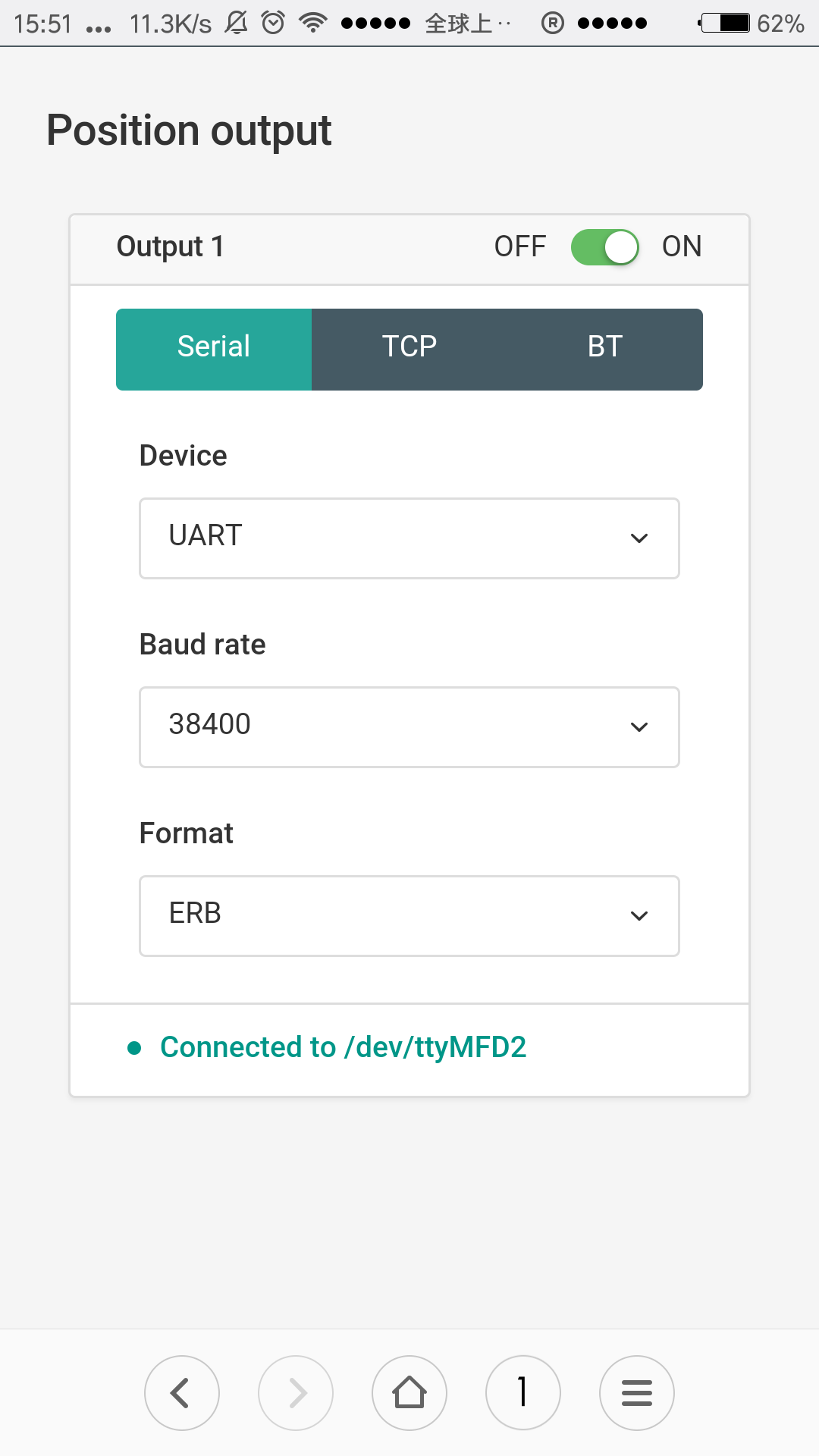
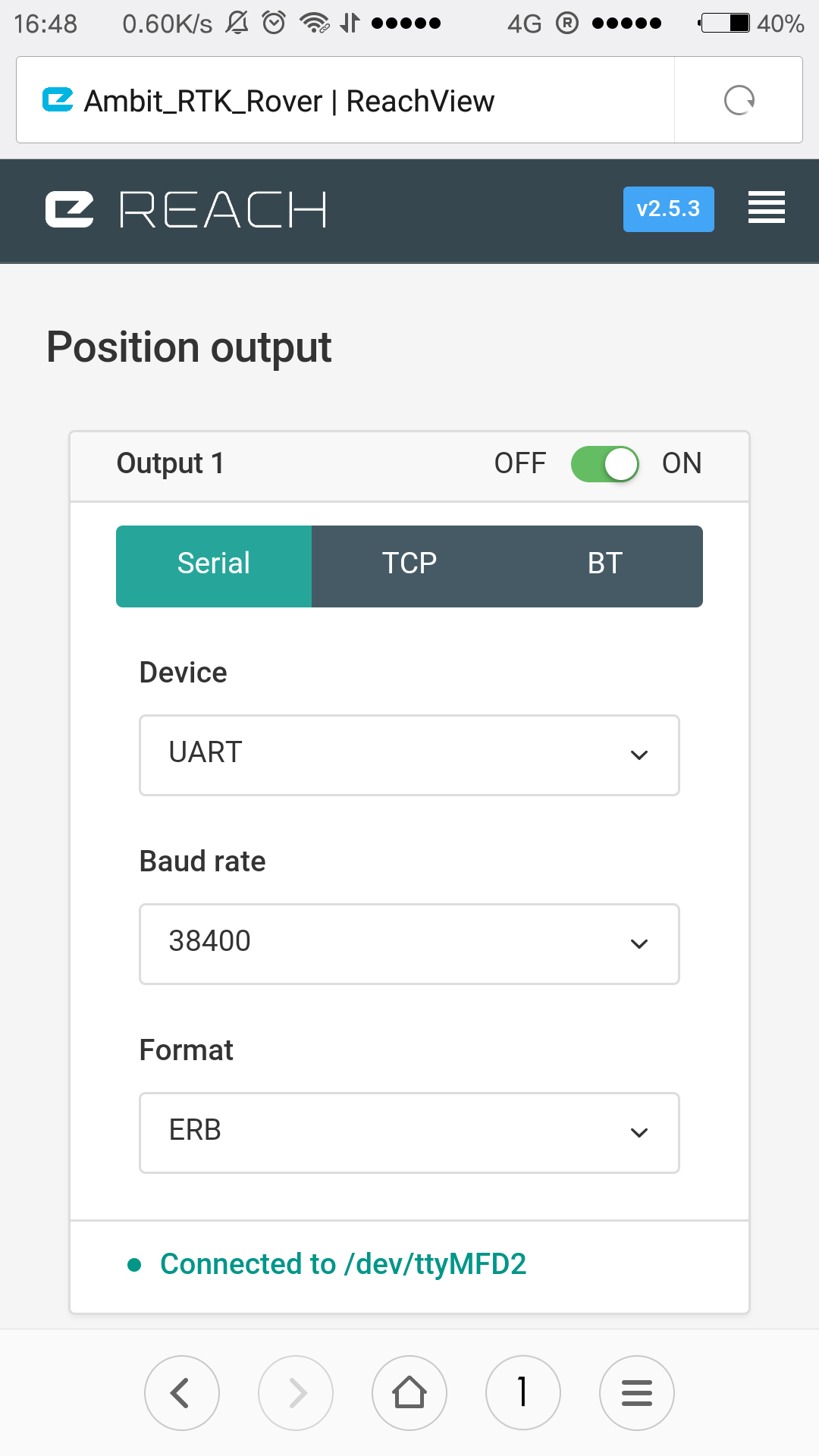
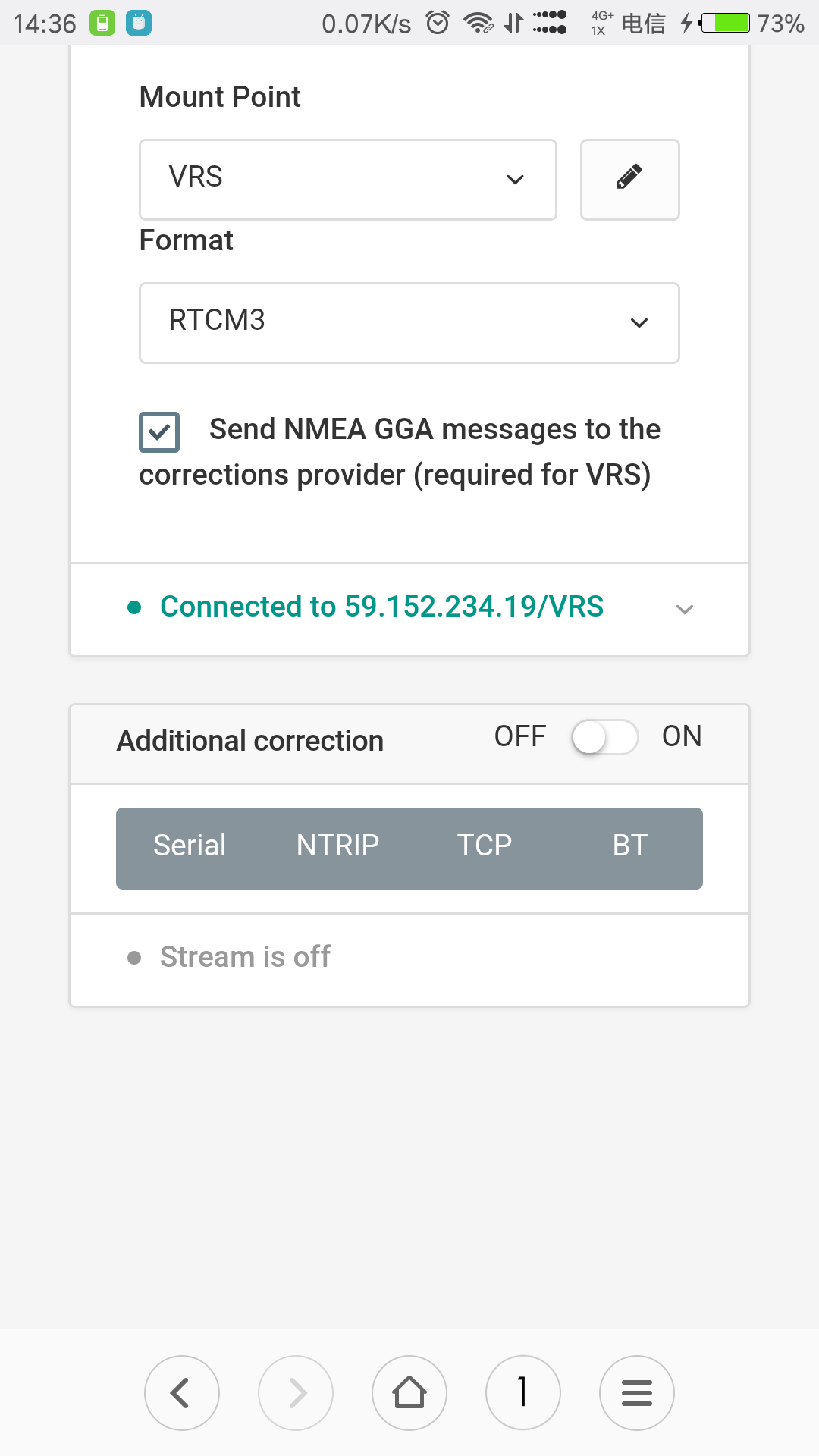
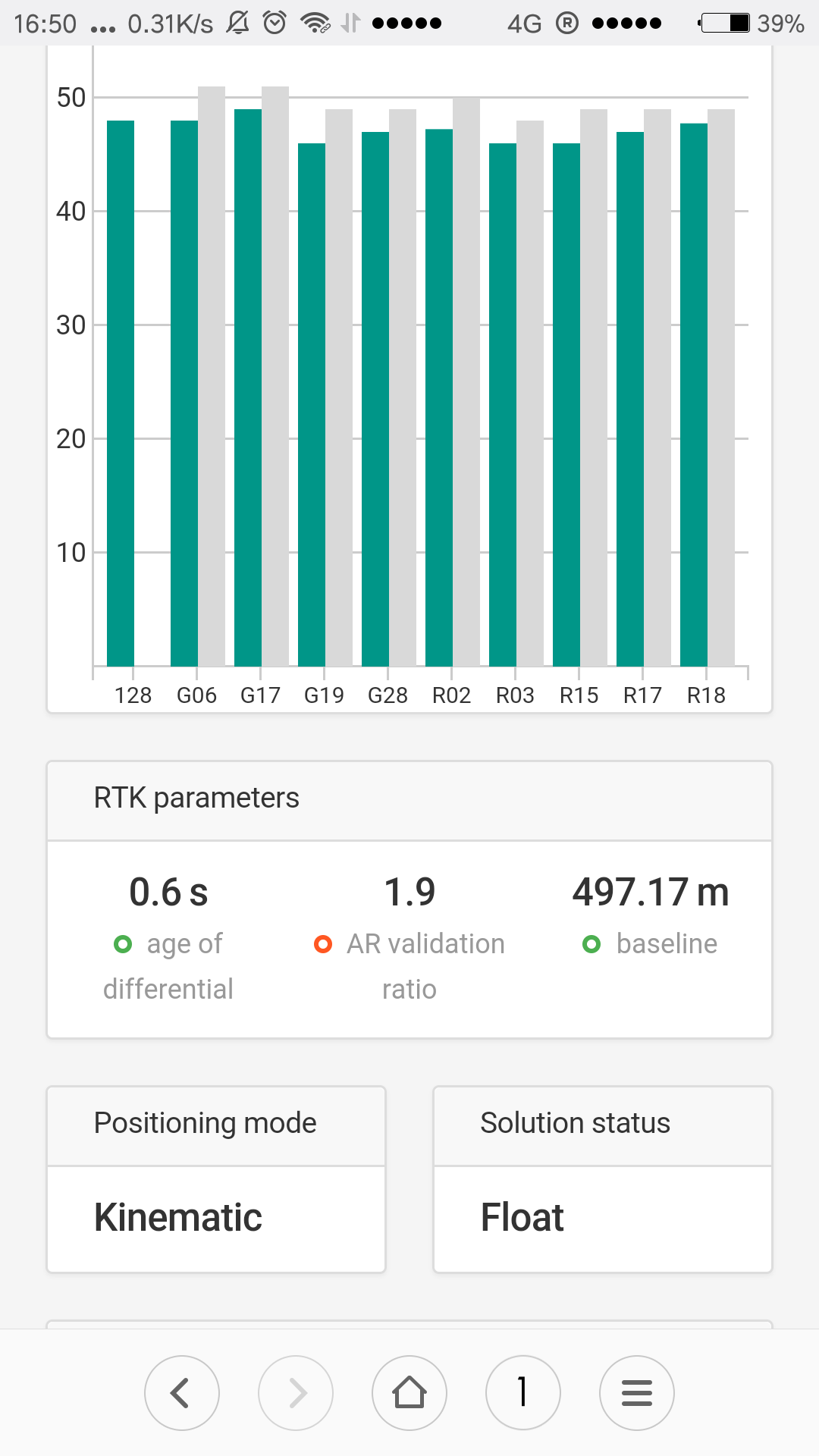
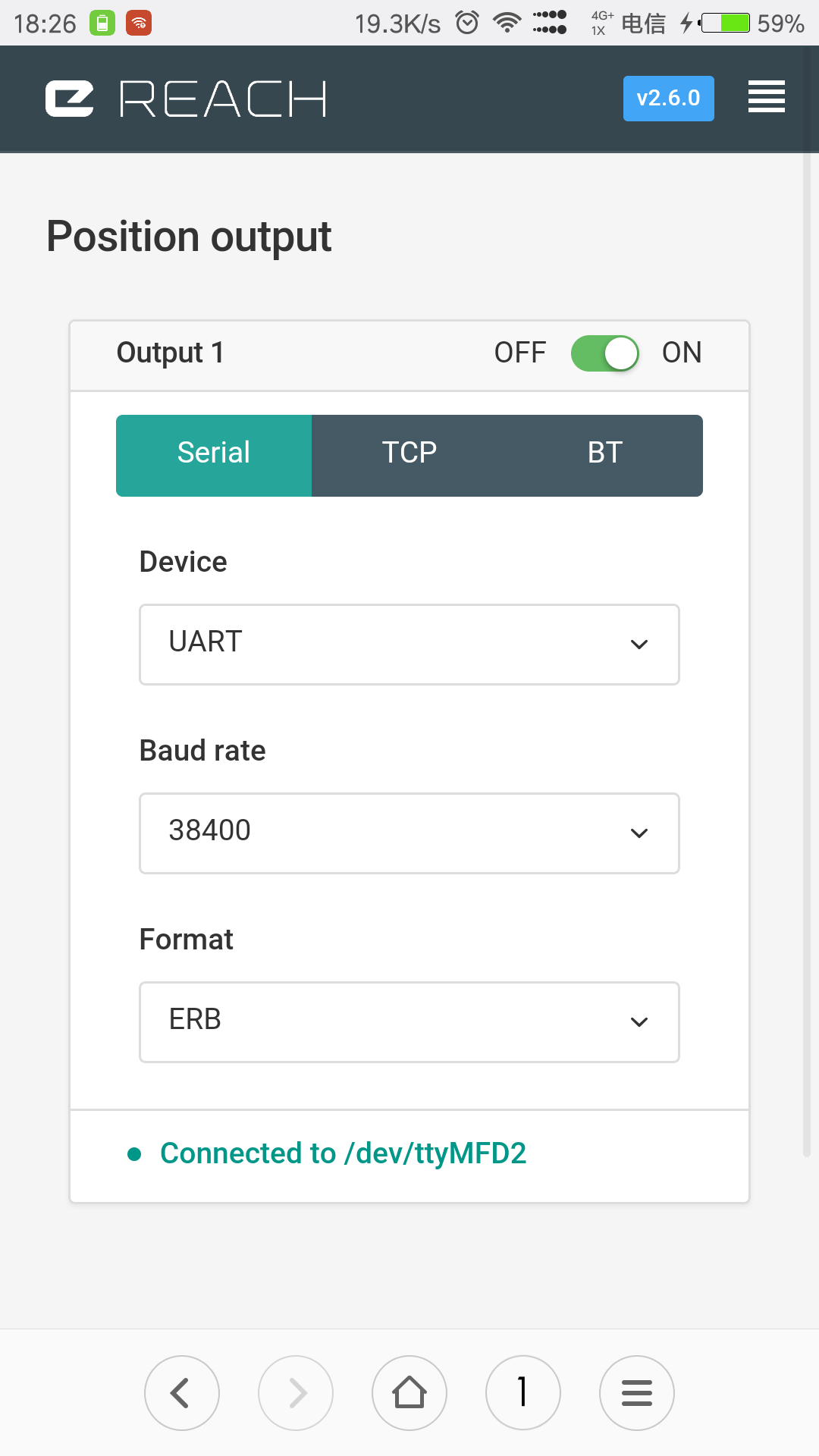
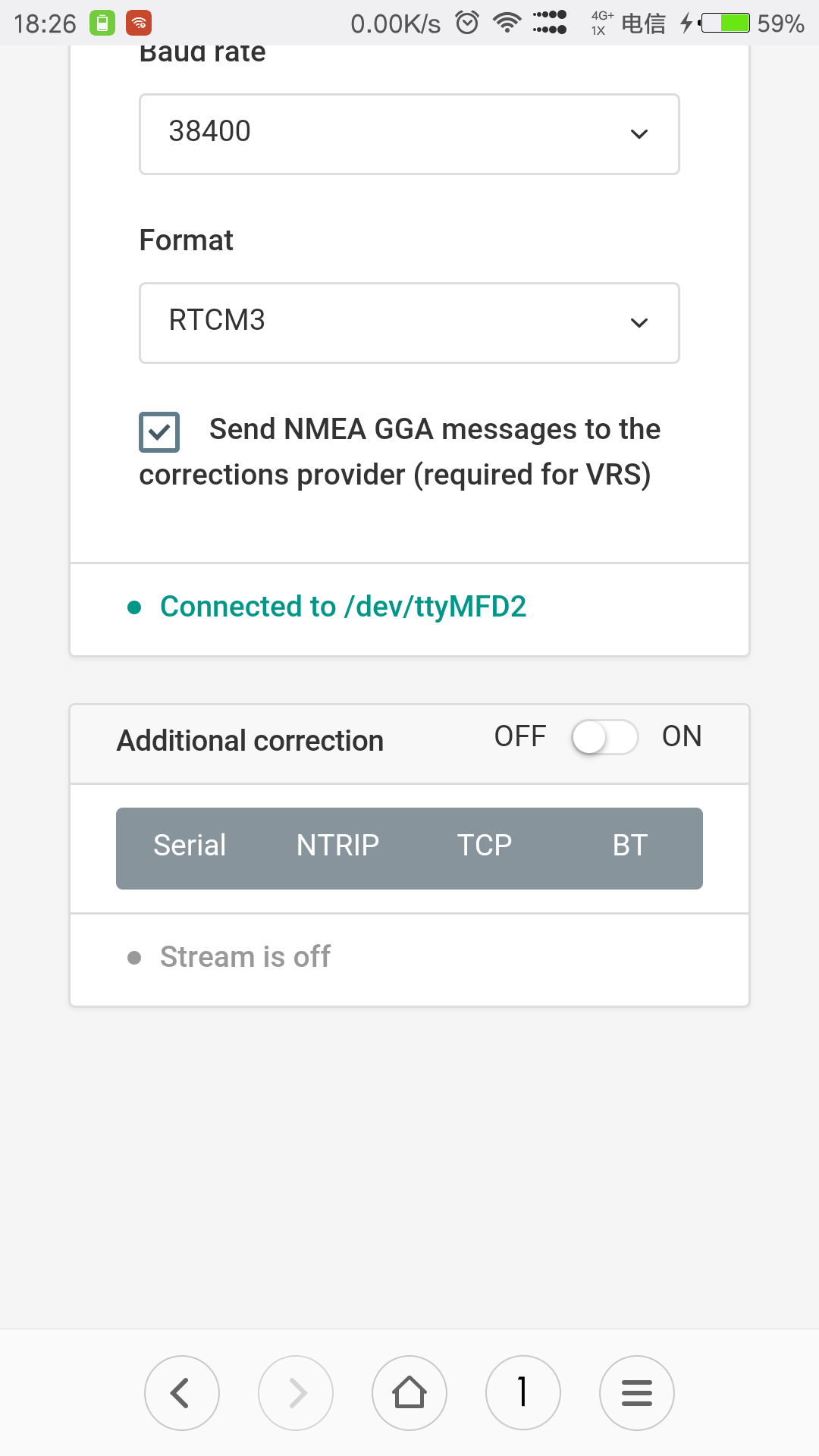
here is the rover setting screen dump during the first testing
i found a bug , that is sometimes the correction from base cant be shown ,but in fact , it has been transfered into the rover .
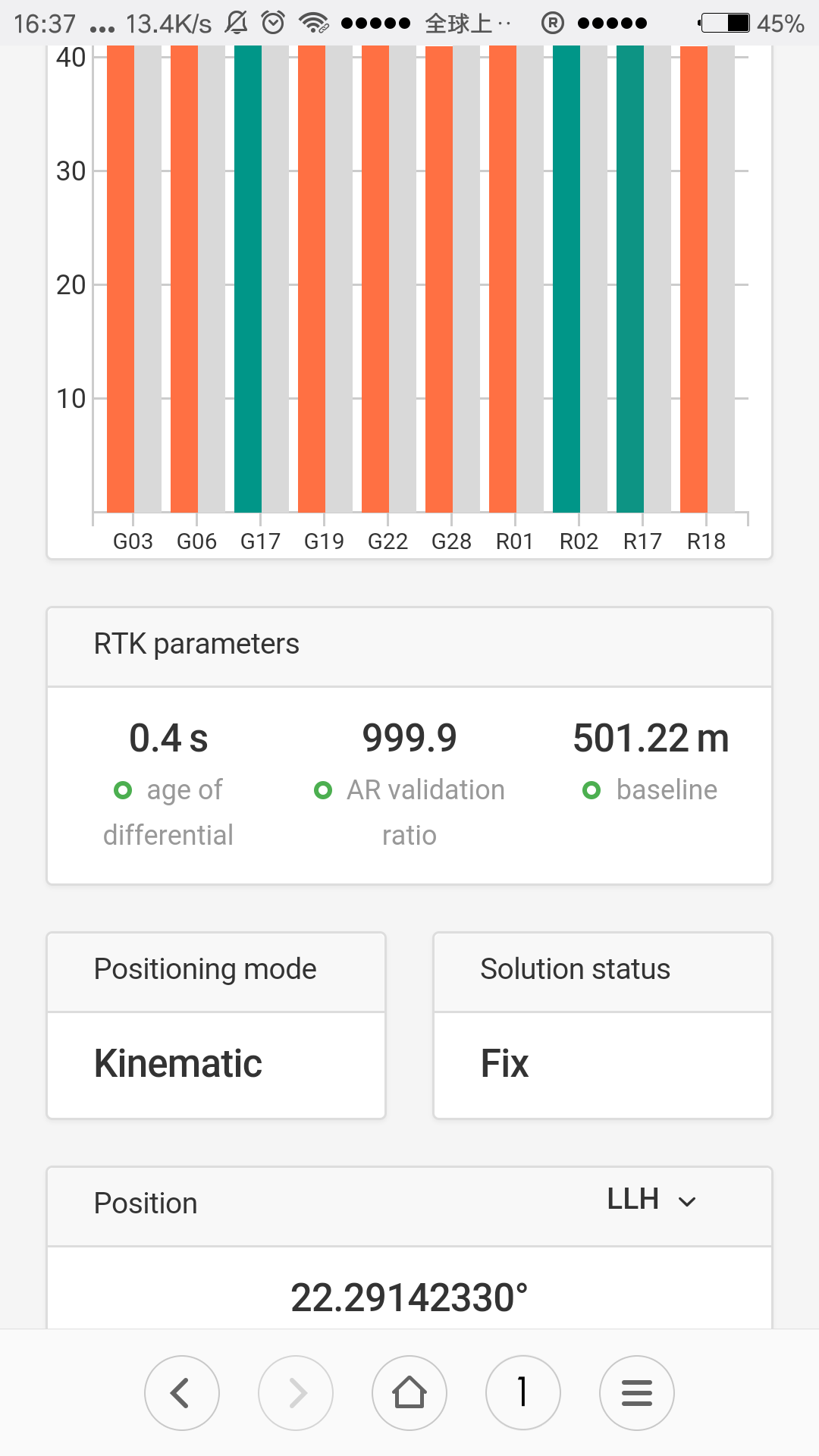
during the second test , i encounter the first strongly fix , but last for 30 seconds only, i dont know why , i didnt do anything.
and the single is not in its best condition , but i only got float when i have the best single .
i just cant get fix , always float . i dont know why .
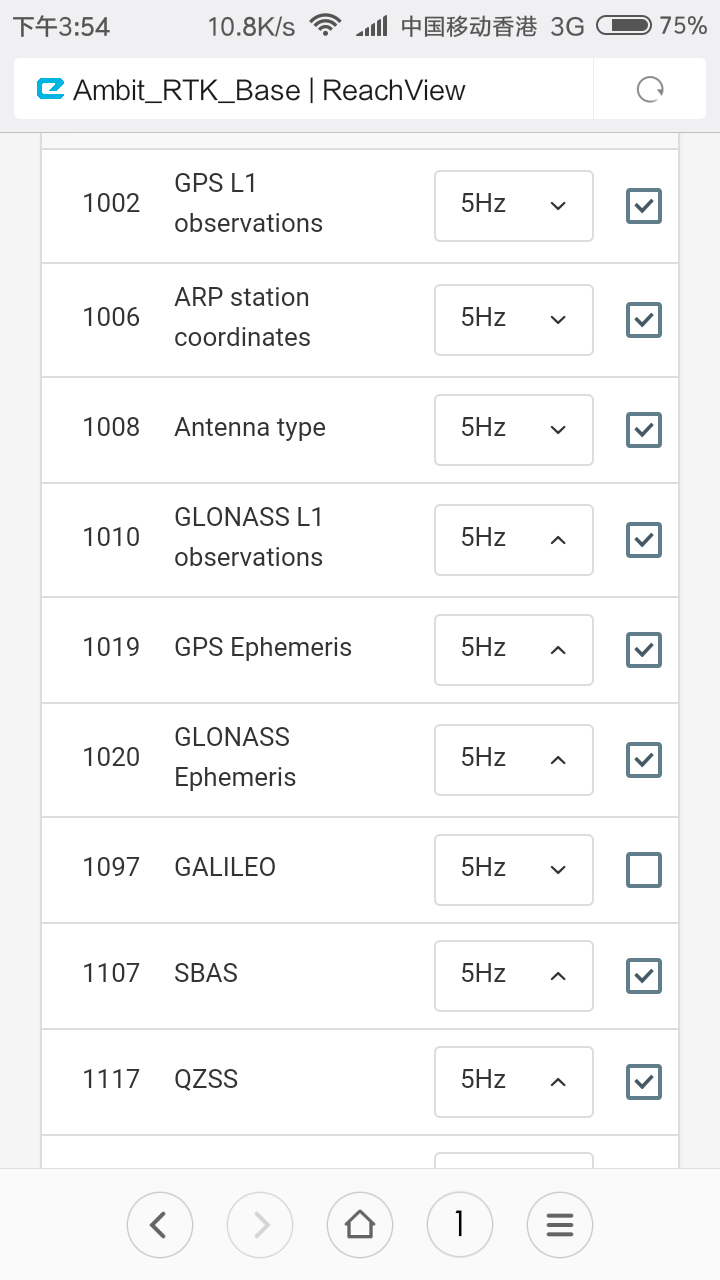
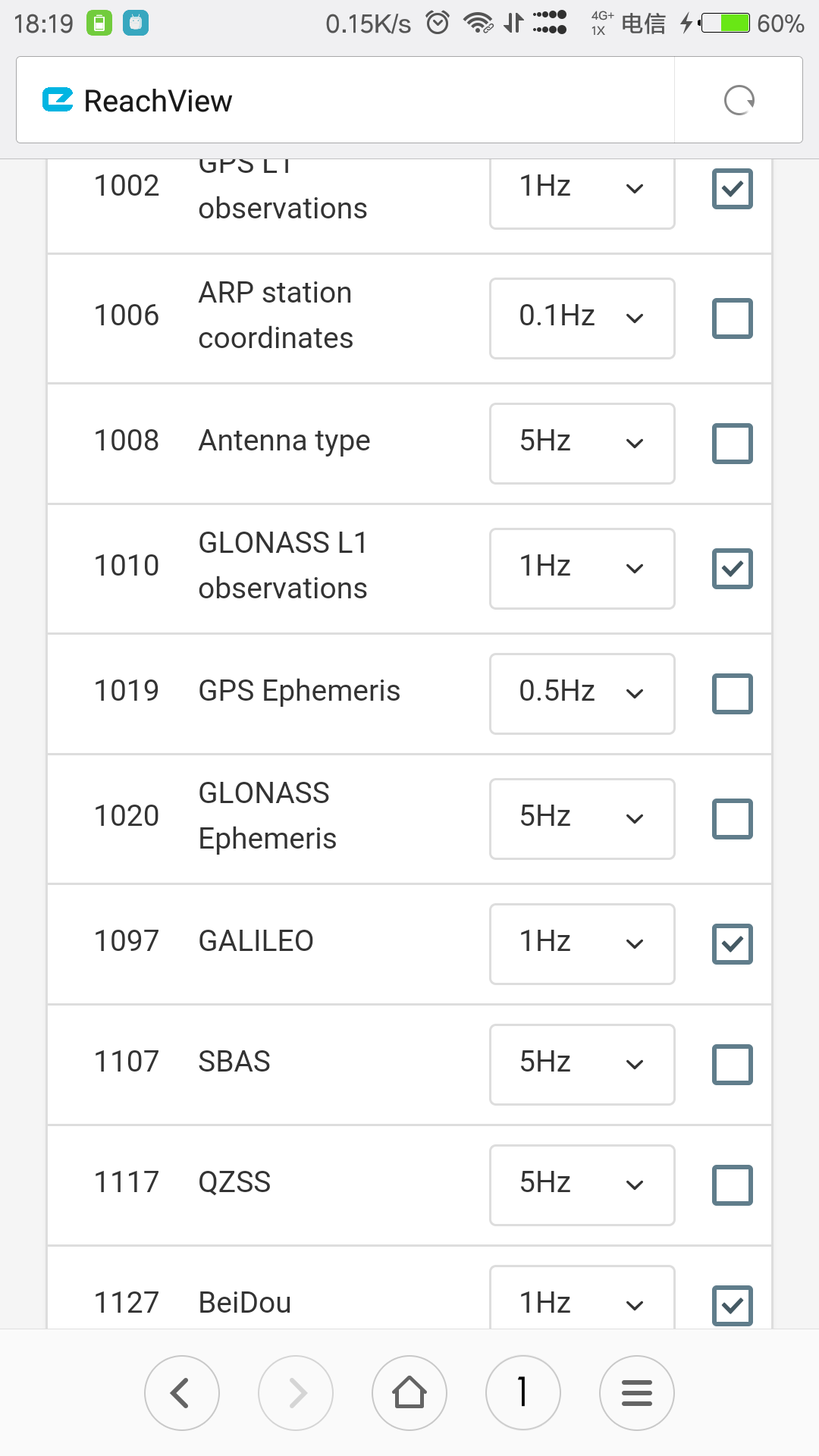
You lost the fix because corrections stopped to come. This happened because you have configured all messages at 5Hz. You are trying to push too much information though the radio (that is not even useful) and at some point it is not able to transfer it any more.
There is no need to send ephemeris, it will only waste the radio bandwidth. Please try the following:
Also, put your tripod higher than the fence, you are hiding the antenna behind the metal bars.
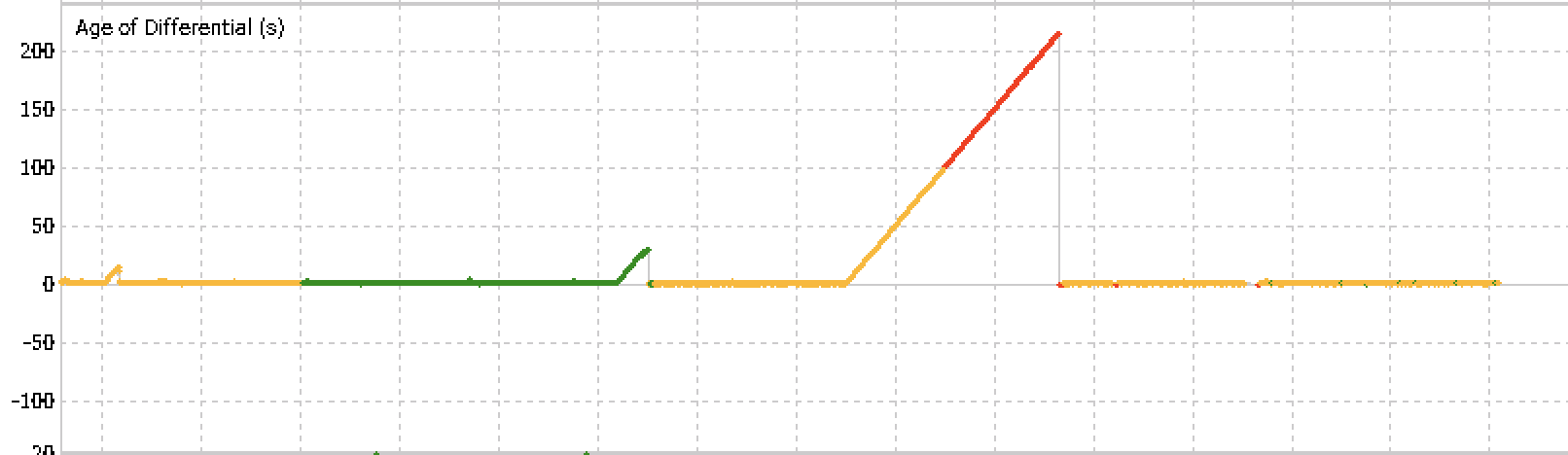
Monitor the “age of differential” parameter on the status screen, it shows how long ago was the last arrived correction generated. Normally it should be <4s.
RTCM3 log: lost connection 15 times. when connection lost, fix is lost.
rover log: poor reception until 07:52, after that it is good until the end at 08:11
with fix-and-hold enabled, good fix starts at 07:53 and lasts until 08:06 with about 7 base signal interruptions in that time.
I suggest to try again, but switch your rover from continuous AR to fix-and-hold AR. Also if there is a way to keep the base corrections coming in without interruption, that would help.
i know , but in the morning , get fix and i didnt change anything , when i tried second time, it comes to this .
any solutions ? shall i put the screendump of base for you ?















 said
said 