Am hoping someone can point me in the right direction. using ReachM+ with Navio2, running ardupilot info sent thru ROS mavros.
Am reading the topic on ROS called “/mavros/global_position/global” to get the Current GPS coordinates. how do i get the current accuracy of these readings (like horizontally accurate to a few meters )?
Relative or absolute accuracy?
Is the reach m+ set up for RTK? If so, your absolute position accuracy is determined by how well you placed your base-station.
Relative or absolute either would work, i would like to know programmatically that precision being reported now is +/- 1m radius or whatever, so i can do some actions like recording position based on accuracy.
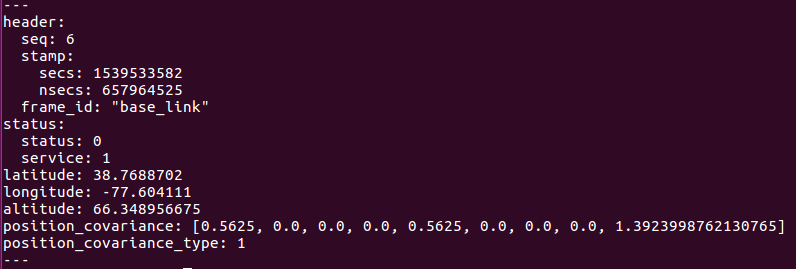
the navsatfix message published has below format , either using this format or other programmatic ways to find accuracy from ReachM+/Navio2 would be great.
How exactly do you want to determine the precision? Is it enough to get information about solution status only for your application?
You can output the position from Reach in NMEA format. NMEA messages contain information about solution type, HDOP, VDOP, and PDOP. HDOP parameter provides a description of horizontal precision, VDOP - of vertical and PDOP - of position (3D) precision.
So even if there are no ROS topics that fit your requirements, you can write your own topic to get data from NMEA messages.