



Another problem may be the relocation of the reach antenna and camera. The antenna is about 8 cm closer to the end of the drone than the camera. How can I set X and Y relatives offset? Is it possible to set offset in Pix4D or RTKlib?
Yes, you can if RTKLIB, but if you have GCP’s this won’t matter. It would matter greatly if you did not, but GCP’s will put the map where it is supposed to be.
1 Like
I tried adding positions to the images, but there seem to be many more position events than there are images?
Hi there,
Just to clarify, did you convert these coordinates to WGS84 before processing in Pix4D, or did you save them as they are?
It can. However, if Age of differential becomes too large, Reach most likely loses a Fix solution as well.
1 Like
Yes, there are more events than images, but I don’t know why. I manually deleted the files by comparing the coordinates from the events file and the raw coordinates from the mission planner.
Save as they are.
Hi Michal,
Let’s try to figure out why it happened. It might be the reason for your issues as well. Could you share the photo of your hardware setup? I’m mostly interested in Reach and camera integration.
1 Like
Currently, the emlid module is located at the bottom of the aircraft. For the mission discussed in this thread, I have marked the previous location of the emlid.
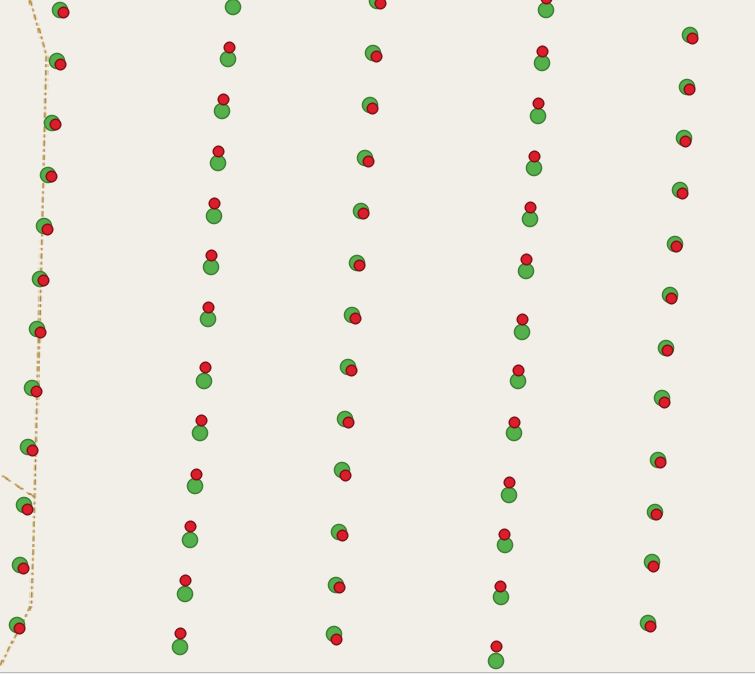
I imported events after postprocessing and raw events from mission planner to qgis (data from other mission)
Green point - postprocessing
red point - raw geolocation
Hi Michal,
I’ve downloaded the files, thanks. Did I get correctly that you have 28 images from this flight?
red point - raw geolocation
Did the Reach receive corrections from the base during this flight?
No, “28” prefix means location number. In zip file should be 1674 images.
No, corrections are loaded after the flight by post processing from base.
Hi Michal,
Sure, thanks!
Hi Michal,
I’ve noticed that you modified our hot-shoe adapter. Could you please clarify what the reason was?
The modification was created to combine camera and autopilot
Hi Michal,
It seems this is the root of the issue. Due to cable changing, time marks are registered incorrectly. It led to wrong images’ coordinates and affected the orthomosaic accuracy. In case you have another hot-shoe cable, it would be very helpful to check if the issue repeats in that case.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.