Sangjn
October 23, 2016, 2:01pm
1
Hi everyone~
Always thank you very much for reading my topic.
I’ve been working on Pixhawk integration with following helpful material.
“https://docs.emlid.com/reach/apm-integration/ ”
But in this guidance, I have two questions.
That’s all of my questions.
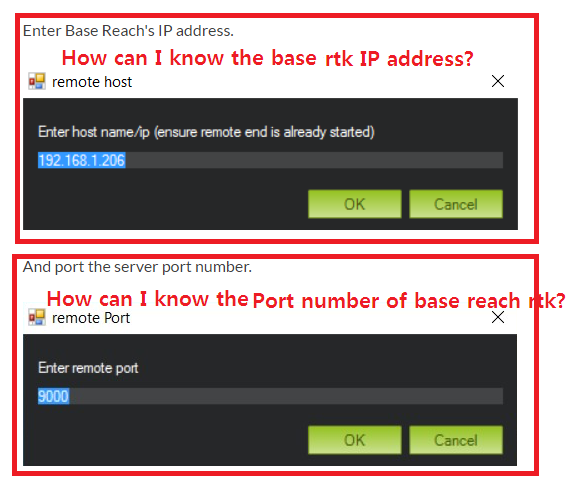
About configuring base rtk address, Would it be exact if i use the Ping app which is introduced in document?
And after I get IP address of base rtk, how should I configure base rtk’s port number?
I’ve dug about this problem for few days, but there haven’t any progress…
Any tip or answer will be very very very appreciated for me~!!
thanks again for taking your time ~~
You can find IP using Fing app is Reach is on the same network, if Reach is in hotspot mode it will always have IP:192.168.42.1
You can choose port number when configuring base mode in ReachView app.
Sangjn
October 23, 2016, 2:26pm
3
Thx Igor for your fast response!!
So you mean…
If rover rtk module is connected to the wifi hotspot which is created by base rtk module,
Right??
If you have rover and base in the same wi-fi network and wi-fi range is sufficient for your application, then there is no need to set up corrections in MissionPlanner. If you would like to set up correction through MissionPlanner you need to follow the guide step by step and have your PC and Base in the same wi-fi.
1 Like