Buenos días estimados, he adquirido dos emlid reach y he creado un flujo de trabajo para hacer un levantamiento de puntos de control GCP para corregir mis ortofotos. Tengo puntos de control ya conocidos que están enlazados a la red geodesica nacional en mi país, por lo que voy a colocar mi base en estas coordenadas y levantar mis GCP con el rover. Entiendo que este proceso se debe hacer en RTK, ya que la base esta ubicada en una coordenada ya conocida, y la recolección de puntos en SURVEY. Alguien mas esta haciendo esto?. Les dejo un flujo de trabajo del proceso que he elaborado en base a la información de la pagina y otros foros, los miembros mas expertos de pronto me ayuden a corregir o validar este proceso.
GUIA PARA EL MANEJO DE EMLID REACH
CONFIGURAR BASE
Los pasos a continuación son cuando ya se tiene la configuración inicial y actualizado Emlid Reach
- Iniciar Reach-View
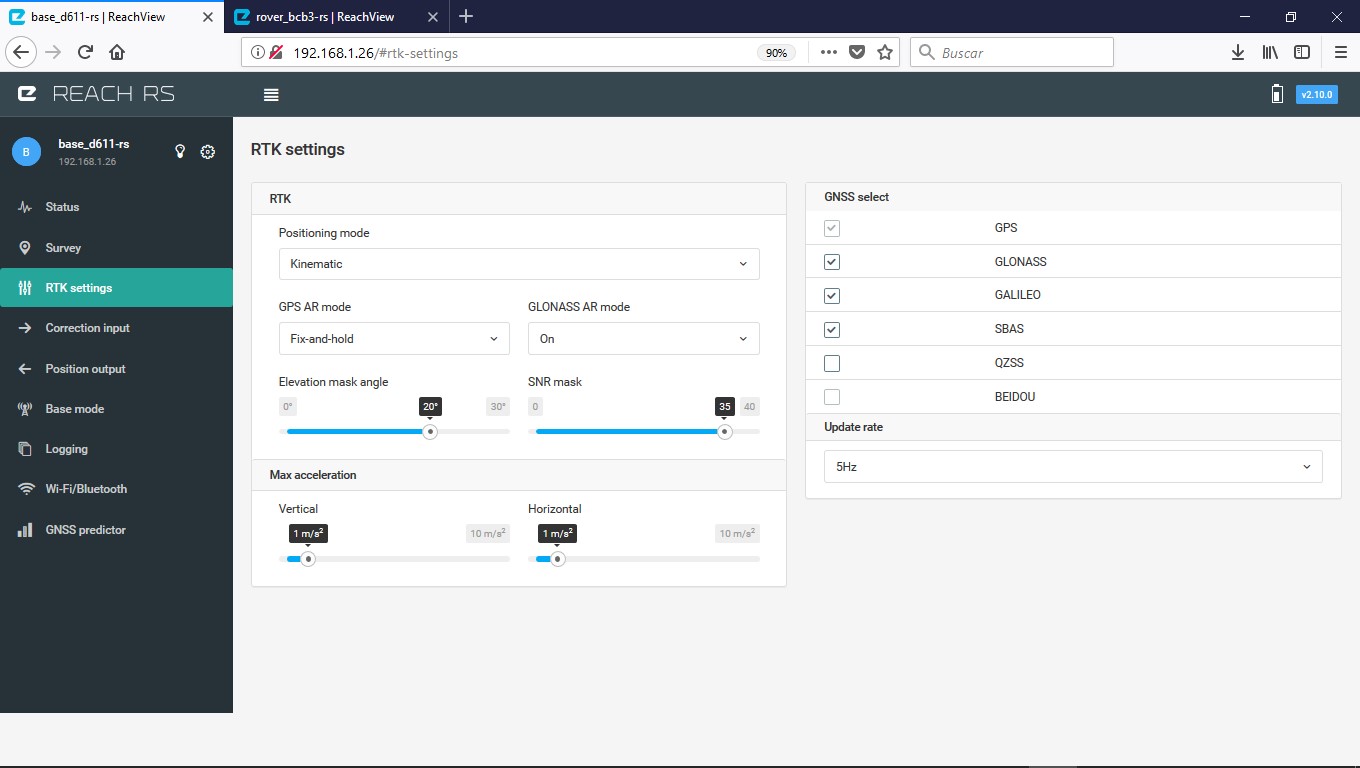
- Configuración de RTK
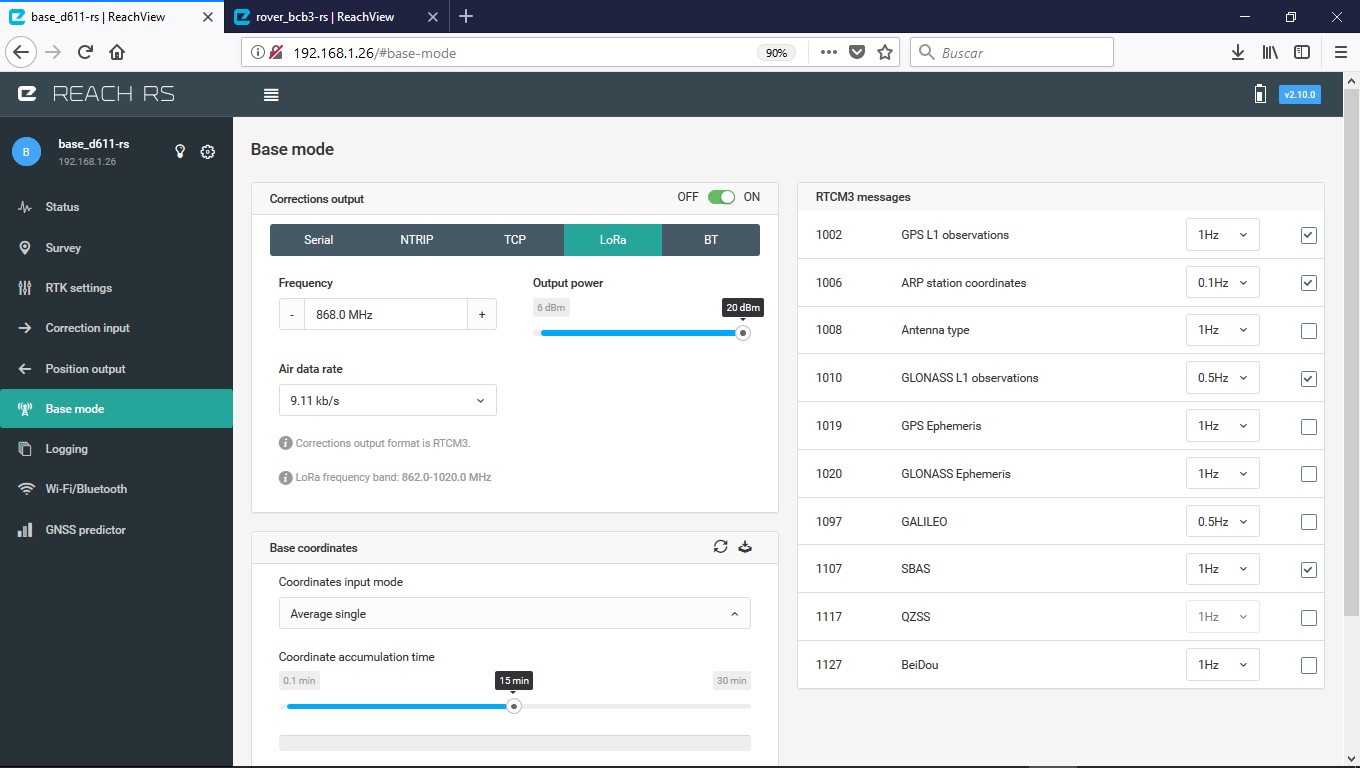
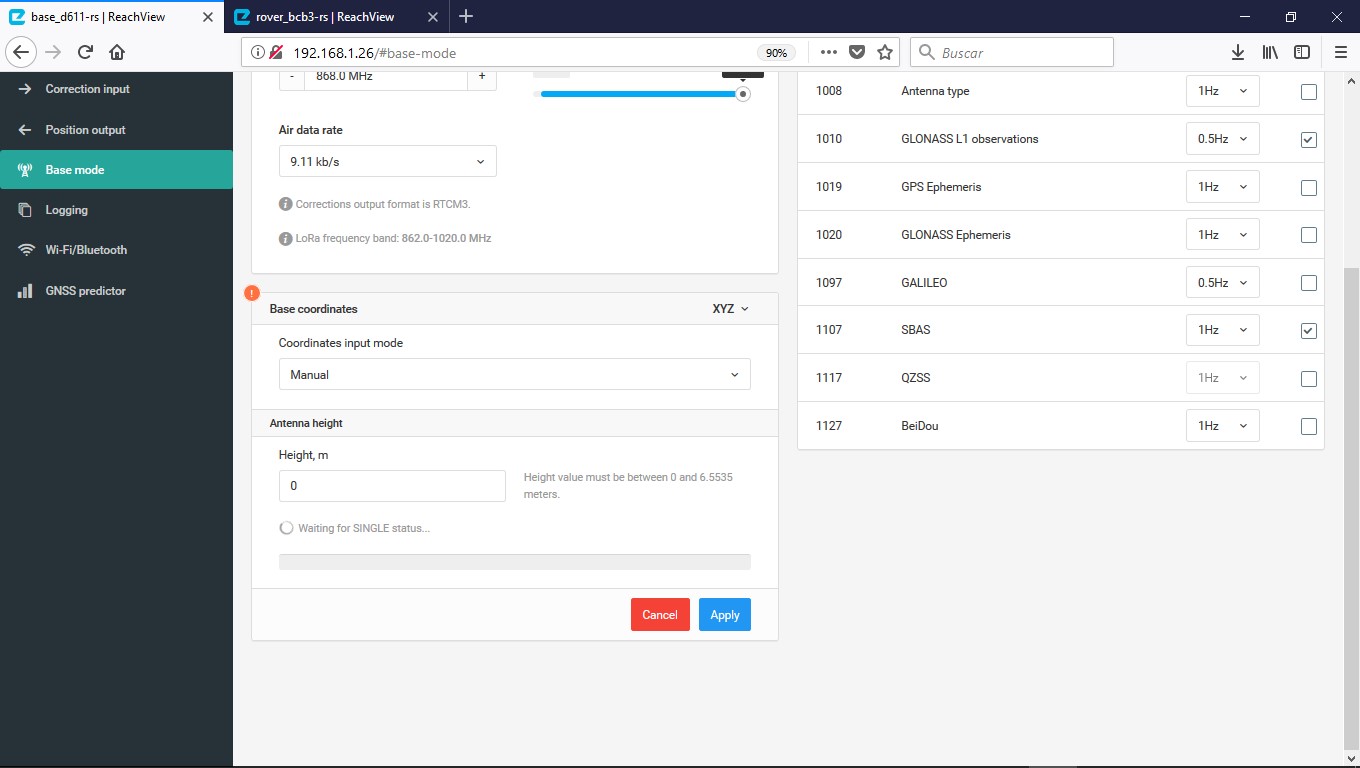
- Base Mode (Modo Base)
• Las correcciones de salida deben estar encendidas y seleccionar LoRa (esto sirve para enviar y recibir correcciones).
• El resto de parámetros se deben configurar como la figura que se muestra a continuación:
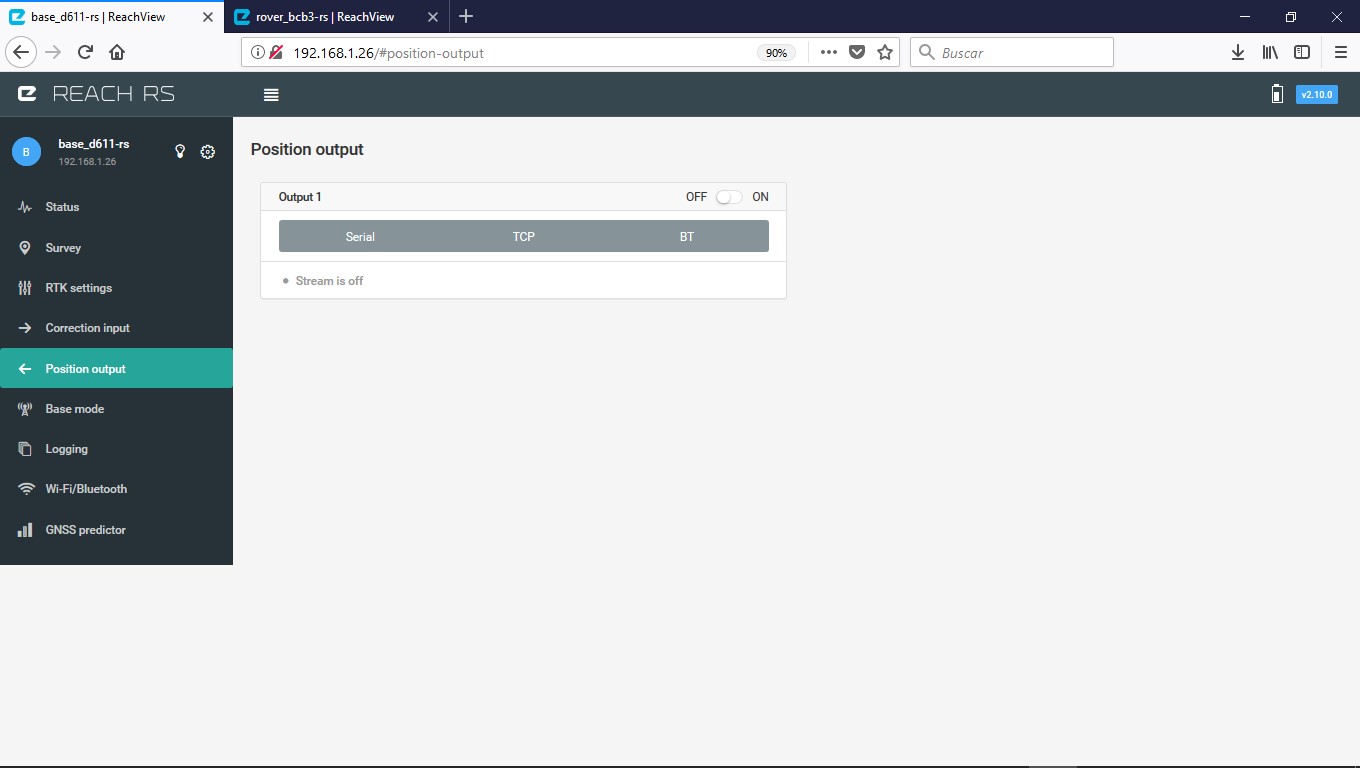
- Position output (Posición de salida), este debe estar apagado, ya que la base es la que va a enviar las correcciones al ROVER.
- Para el caso de tener una coordenada conocida, debemos ingresarla en el modo base, una vez que hemos colocado correctamente la base sobre la marca, además se debe colocar la altura de la base.
Una vez configurada la Base, procedemos a configurar el ROVER
CONFIGURAR ROVER
Para recibir las correcciones de la base, es necesario configurar las correcciones de entrada en EMLID View.
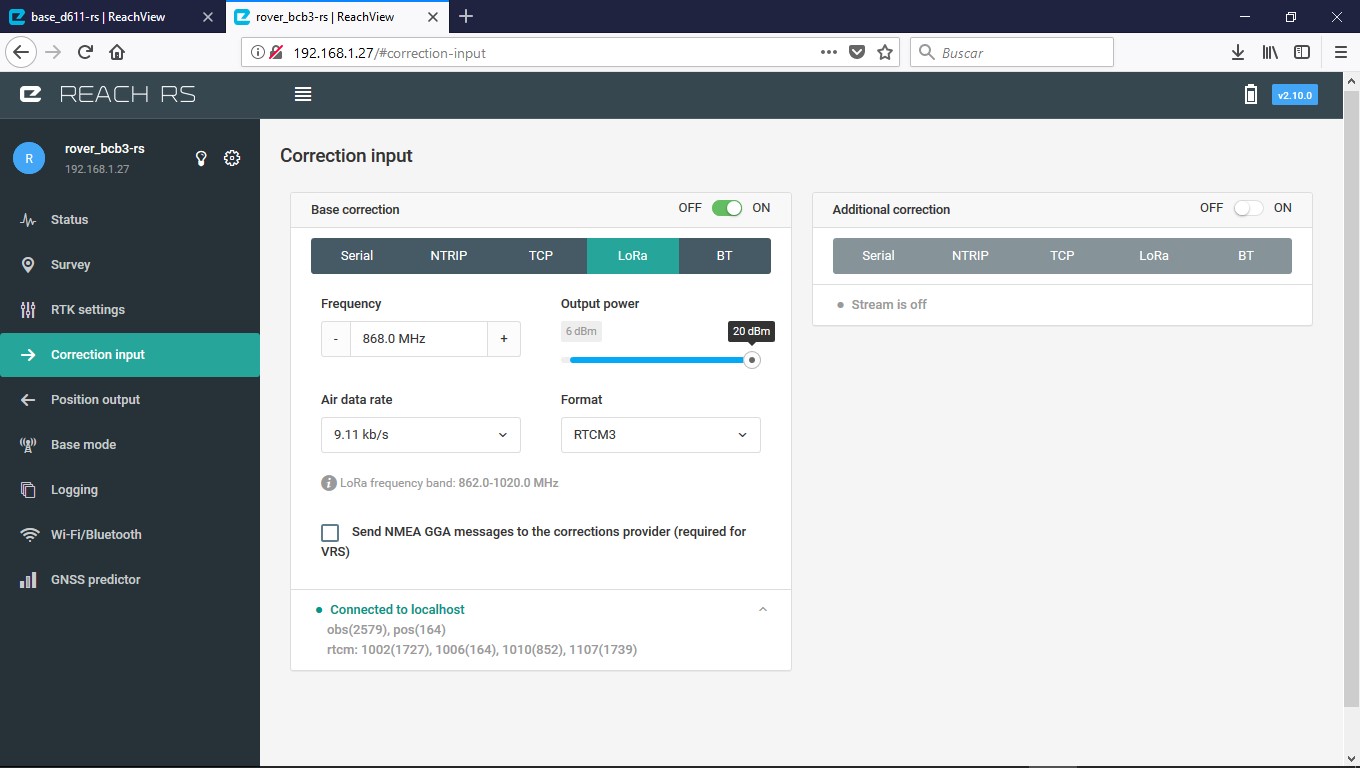
Los parámetros que se deben ingresar en ¨Correction Input¨ deben ser los mismos que establecimos en el modo base, de esta manera el ROVER recibirá las correcciones de la BASE en tiempo real o RTK.
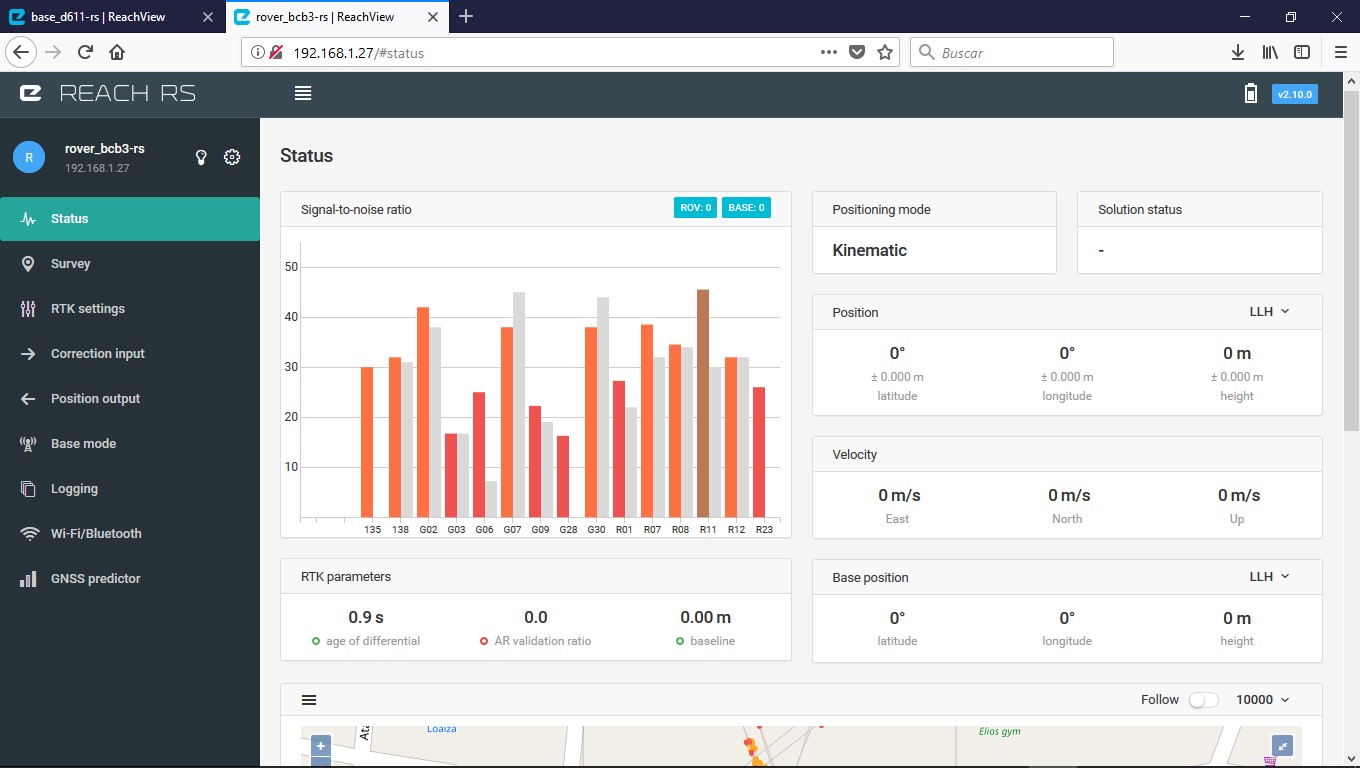
Si la configuración se la hace correctamente, en nuestro estatus del ROVER, debemos observar tres columnas, especialmente la columna ploma, nos dice que nuestro ROVER está recibiendo las correcciones de la BASE a través de LoRa.
RECOGER PUNTOS DE CONTROL (GCP)
Una vez configurada la BASE y el ROVER, es posible hacer el levantamiento de los puntos de control, los mismos que tendrán la precisión que tiene la coordenada conocida en donde colocamos la base.
Primeramente, procedemos a crear un nuevo proyecto en la pestaña de Encuesta (SURVEY), aquí podemos dar un nombre, la persona que va a realizar la encuesta y algunos otros apuntes que se requieran.
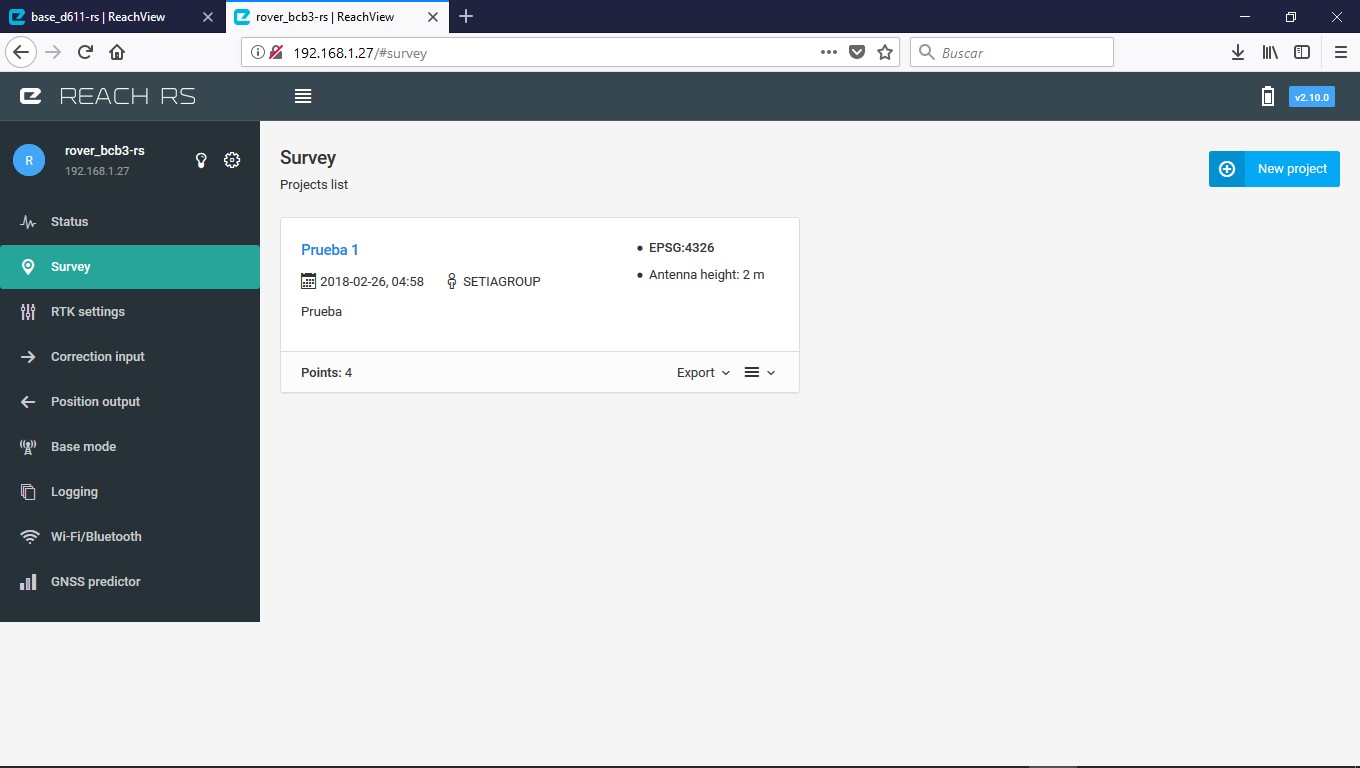
Creado el proyecto podemos comenzar a realizar nuestra encuesta, en la ventana siguiente podemos observar en la esquina inferior derecha un icono verde (+), damos clic sobre el para ir ingresando nuestro primer GCP.

Al abrirse la siguiente ventana podemos ver un menú en el cual podemos ingresar el nombre del GCP que le queramos asignar, así como la altura de la Antena del ROVER.
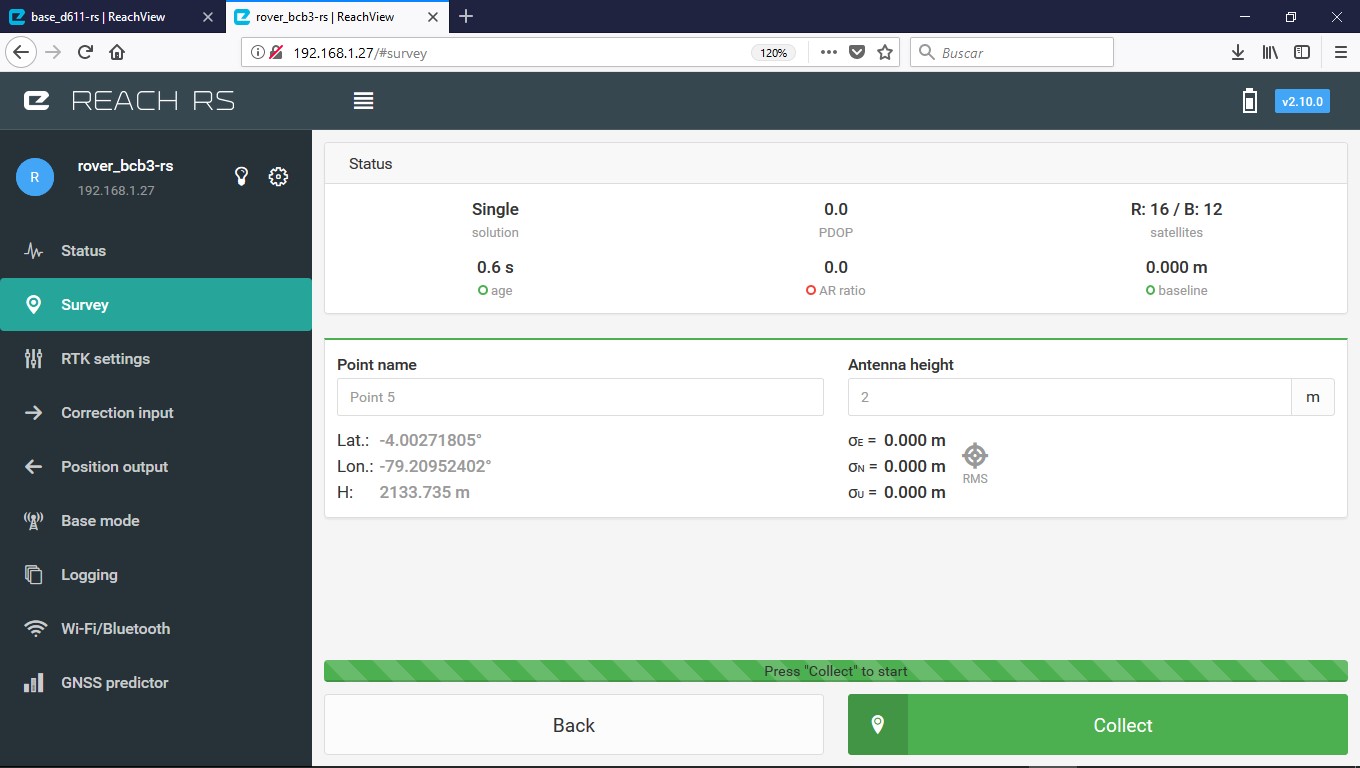
Si la barra se encuentra en verde y con un PDOP menos a 0.2 podemos hacer clic en “COLLECT”. Con esto ya hemos grabado nuestro primer punto GCP de alta precisión, el mismo que se puede ser usado como punto de control (GCP) para corregir nuestro mosaico en el caso de que estemos trabajando en un proyecto fotogramétrico.
BORRADOR.