



I’ll send an example of the DPOS report tomorrow using one of my Emlids. It’s basically just like the OPUS report.
1 Like
Thank you Bryan for the detailed reply. It’s always nice to hear from an actual user of the software/hardware vs just relying on the company’s website for information. Thanks for the contact info, when I get ready to try/buy later in the year I’ll reach out to Adam. EZSurv looks to be a great easy solution, but albeit at a higher price point. 4k/6k for their Rinex/Open Dual Band software solutions.
I think your idea of Emlid sourcing another GNSS chip has some merit. They could offer a two tier system for users.
I just recently purchased a used T2 & LS receiver system and have just started to work with them in my limited spare time. So far I have been impressed with the results using just the default Actions, though I haven’t tried them yet in too much canopy.
1 Like
Hi Mauricio,
There’s no general recipe for this. All datasets are different as well as the satellite data, environmental conditions, and so on. We recommend working with the default settings, but sometimes it’s possible to tweak them slightly for better results.
1 Like
Here you go Mark. 1 hour observation with the default OPUS (GPS only @ 30 sec epochs) setting using RS2 receiver and PP using Javad Justin 3 version 1.80.21(03/16/22)
reach_20230712224726 J3 DPOS 071323.pdf (172.7 KB)
1 Like
Thank you Bryan for taking the time to provide this report using the Javad Justin 3 software.
Like you have said, it generates a similar OPUS like report. I assume this was a autonomous position and not derived from a averaged RTN correction source. Did you happen to also shoot the point with your S.C. RTN just as a comparison? I’ll have to say the residuals look pretty tight.
I recently did a 4.1hr Static test session with the Emlid RS2 and shot that point with both the Emlid RS2 and the Javad LS using the Leica SmartNet service as a comparison against the OPUS solution. All three solutions matched together well, within hundredths of each other. In fact, on the RTN shots, the Emlid and Javad were exactly the same on elevation, which is kind of eerie, though it was in a good open location.
Thanks again. Mark
1 Like
I didn’t think to locate with the RTN. I was helping my wife feed her rescue horses and wanted to get it setup before the UTC day changed for a 1 hour observation. I’ve had problems with processing Emlid’s rinex when observations cross over into the next day. No problem with the Javad receivers.
I’ll submit to OPUS (if it accepts it) today to see how the comparison is. I don’t use OPUS much… it’s too damn picky with the data quality. I can usually PP the data in less than 5 minutes with Justin 3.
You’ll like Justin 3. In my opinion the Justin engine is far superior than OPUS. It’s the same engine in the Triumph LS if you have the RTPK option; I would highly recommend buying if you’ll be using the LS in the woods like we do. It’s a good check on a questionable fix real-time if needed. I think the cost is about $1K, well worth the cost for us.
1 Like
No problem, I know how everyone’s time is valuable, and it seems to fly by, especially as one gets older! My LS unit from an out of state Surveyor, came with the RTPK option enable, though I haven’t had a chance to look into yet but I will sometime in the future. Thanks again, Mark
1 Like
Here’s the NGS OPUS report, probably more accurate as it used 9 CORS vs my only 2 CORS.
reach_20230712224726_RINEX 3.03 NGS OPUS SOL 071323.pdf (41.5 KB)
I’ll verify with RTN tonight
1 Like
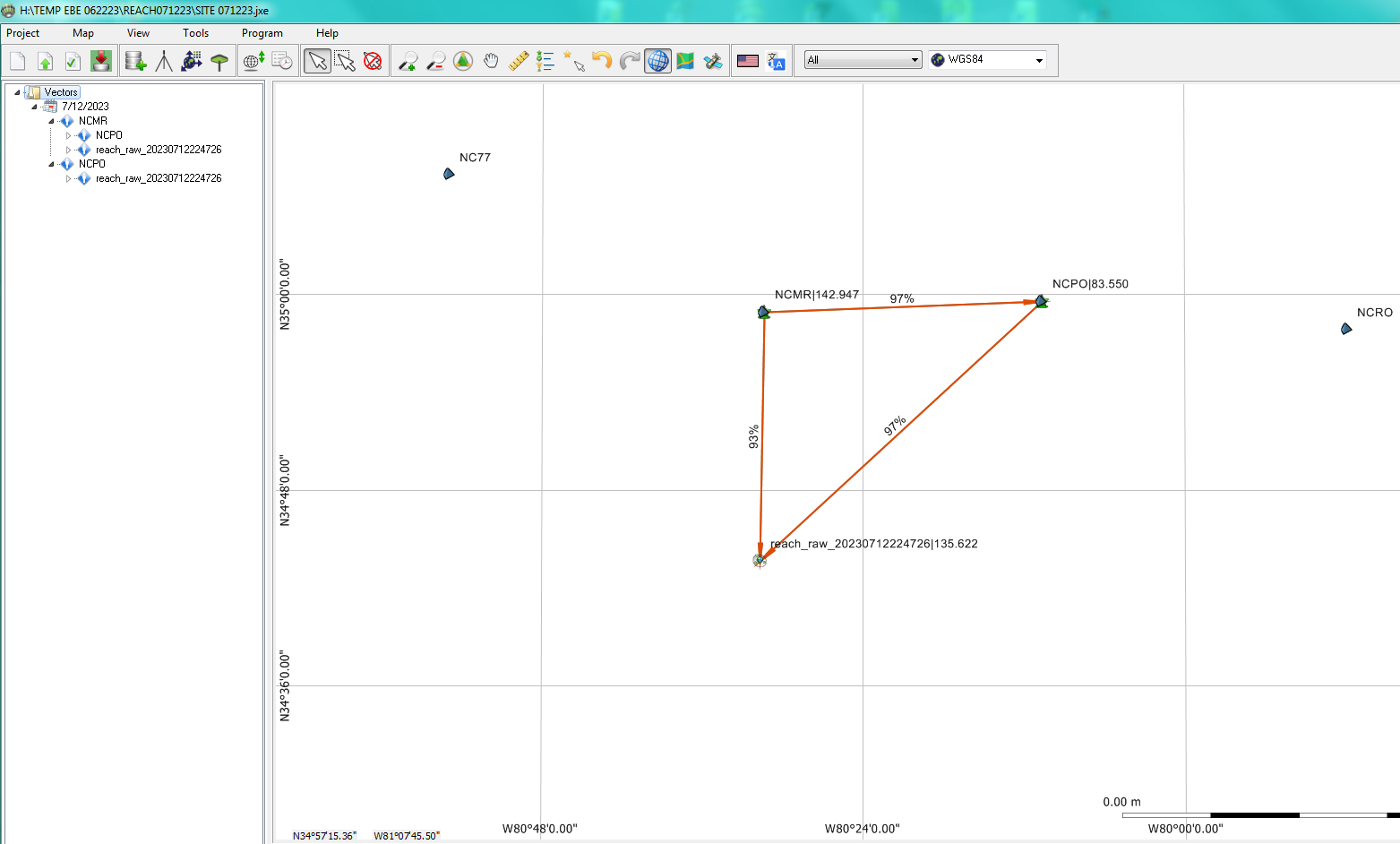
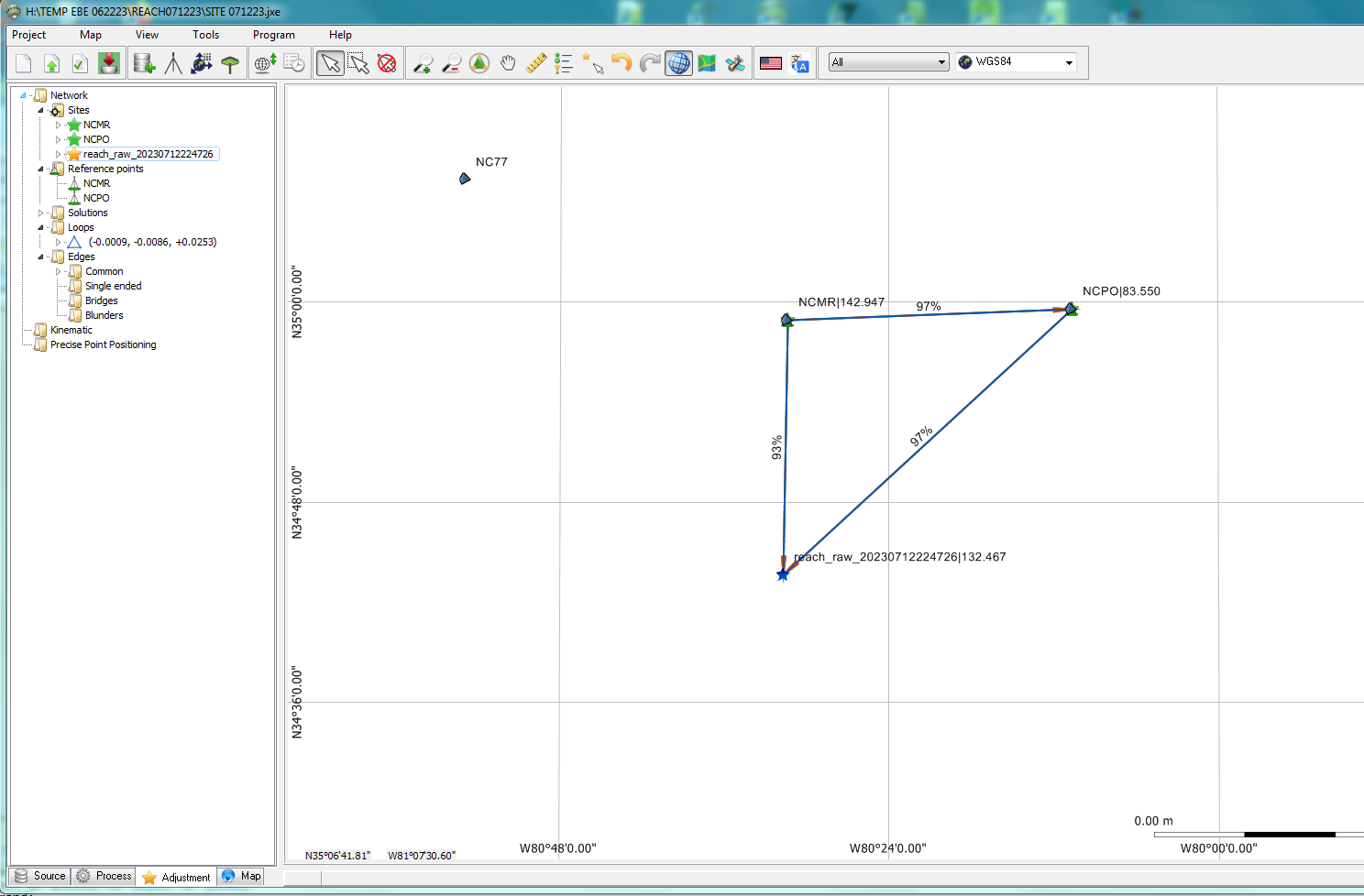
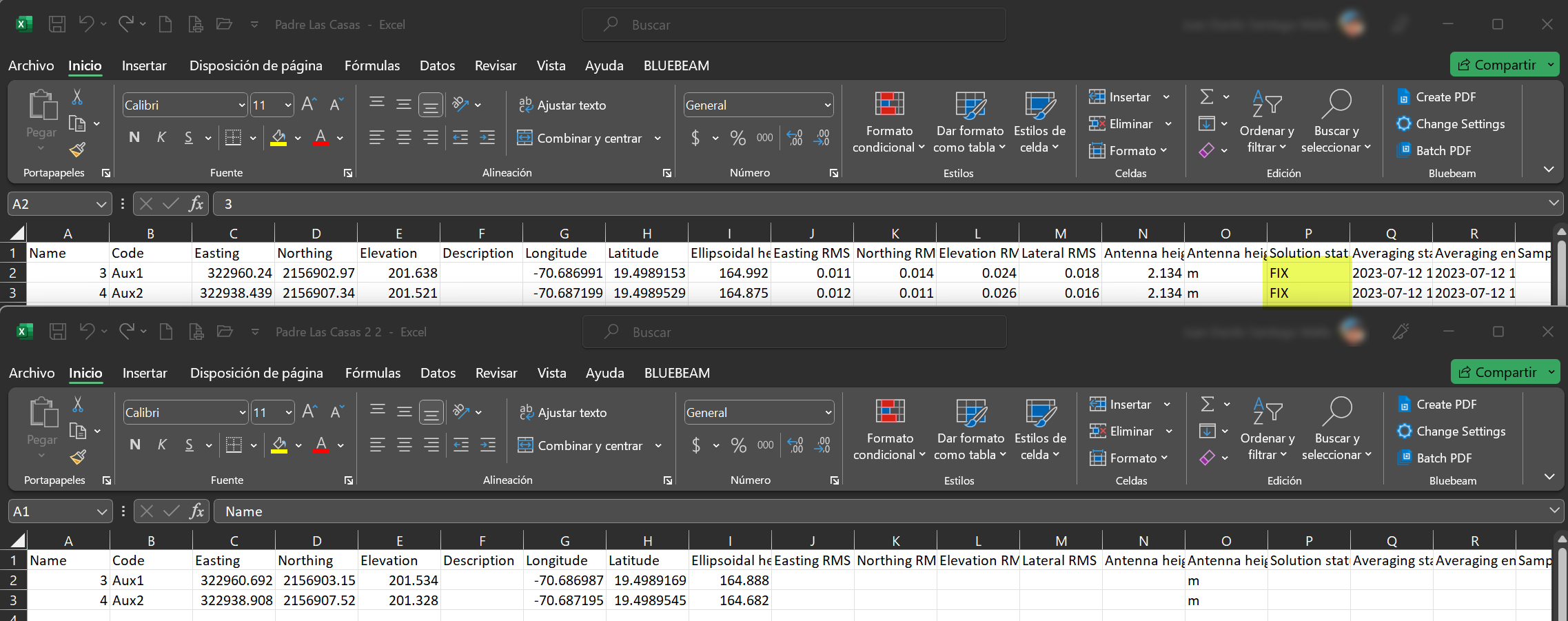
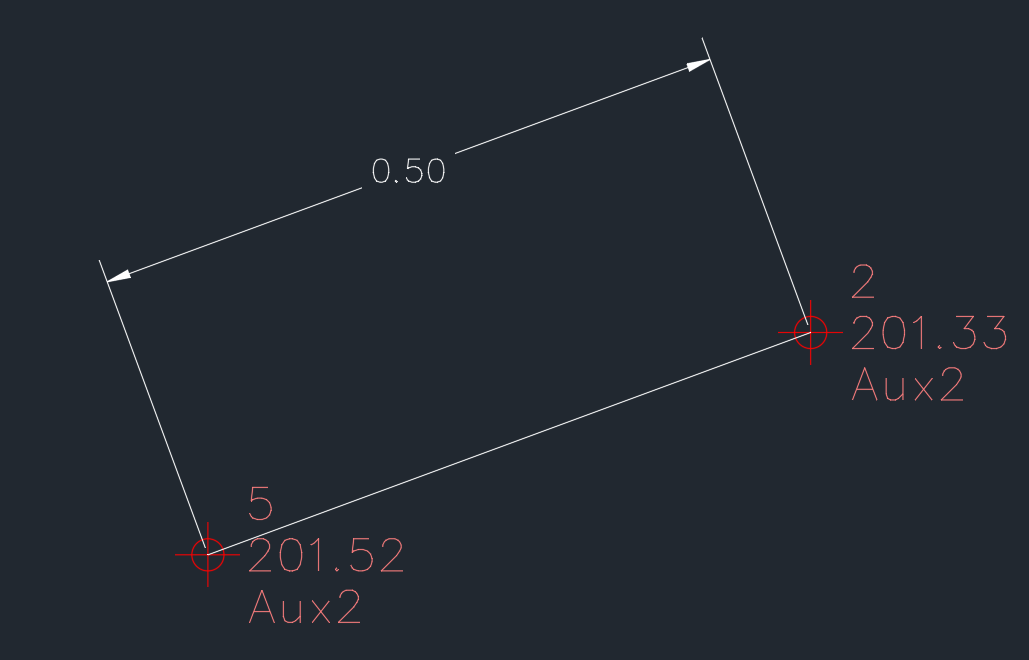
Hi, I could understand you can have difference between RTK and Stop and Go postprocess, but how we can have 50 cm in horizontal and 20 cm in vertical difference in the same point, I think is too much for a precision work, which one is correct?
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.