My apologies here is the fol on
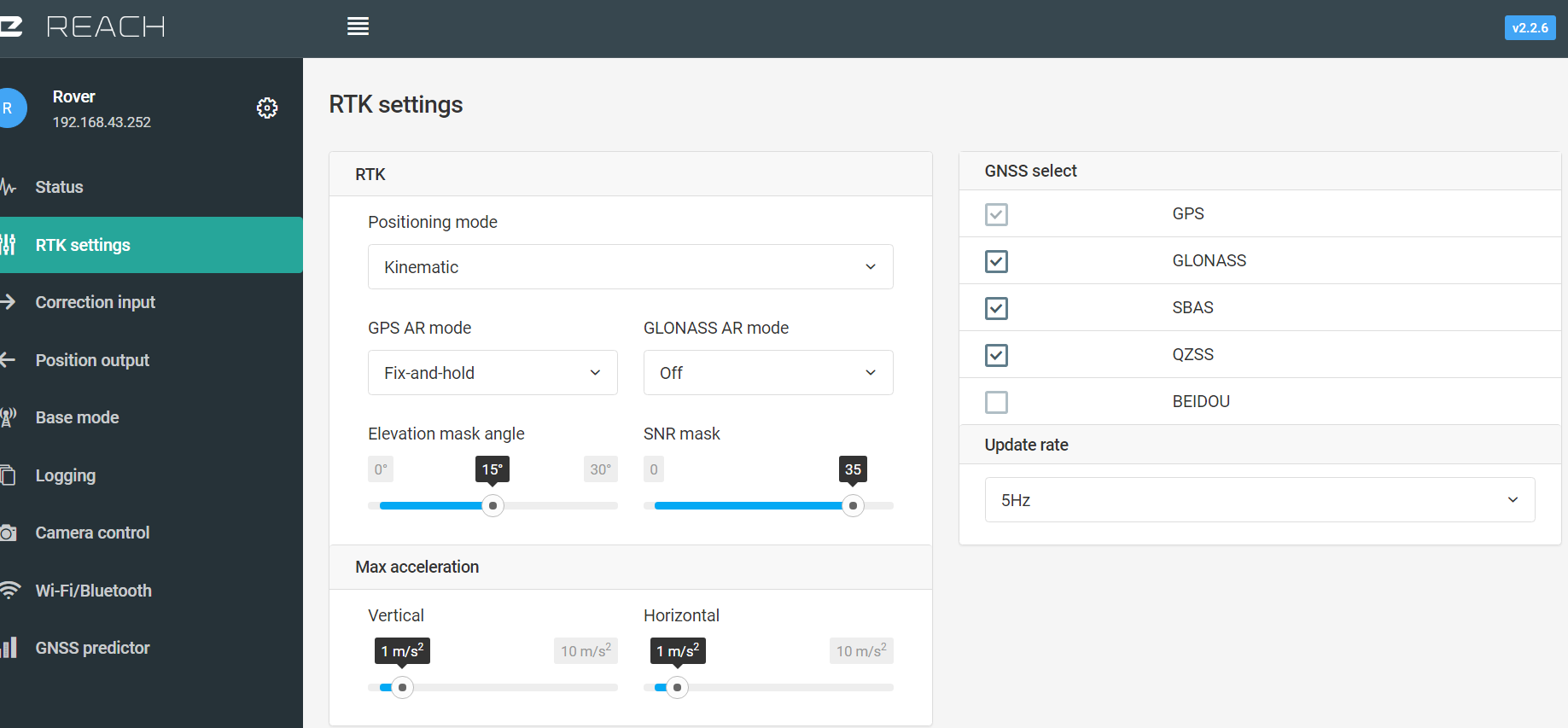
RTK Settings- Base and Rover
: Position Mode-Kinematic
: GPS AR Mode-Fix and Hold
: GLONASS AR Mode- Off
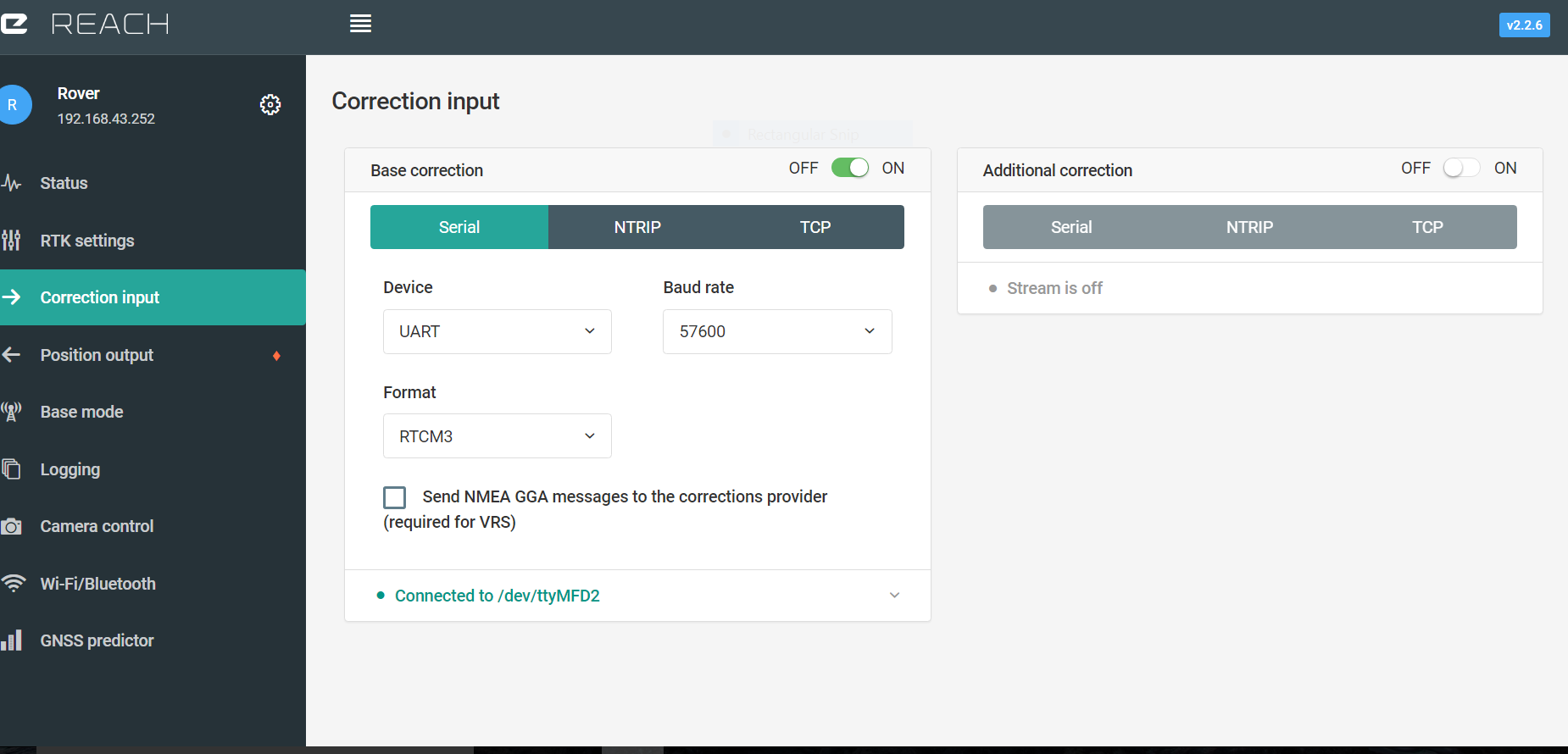
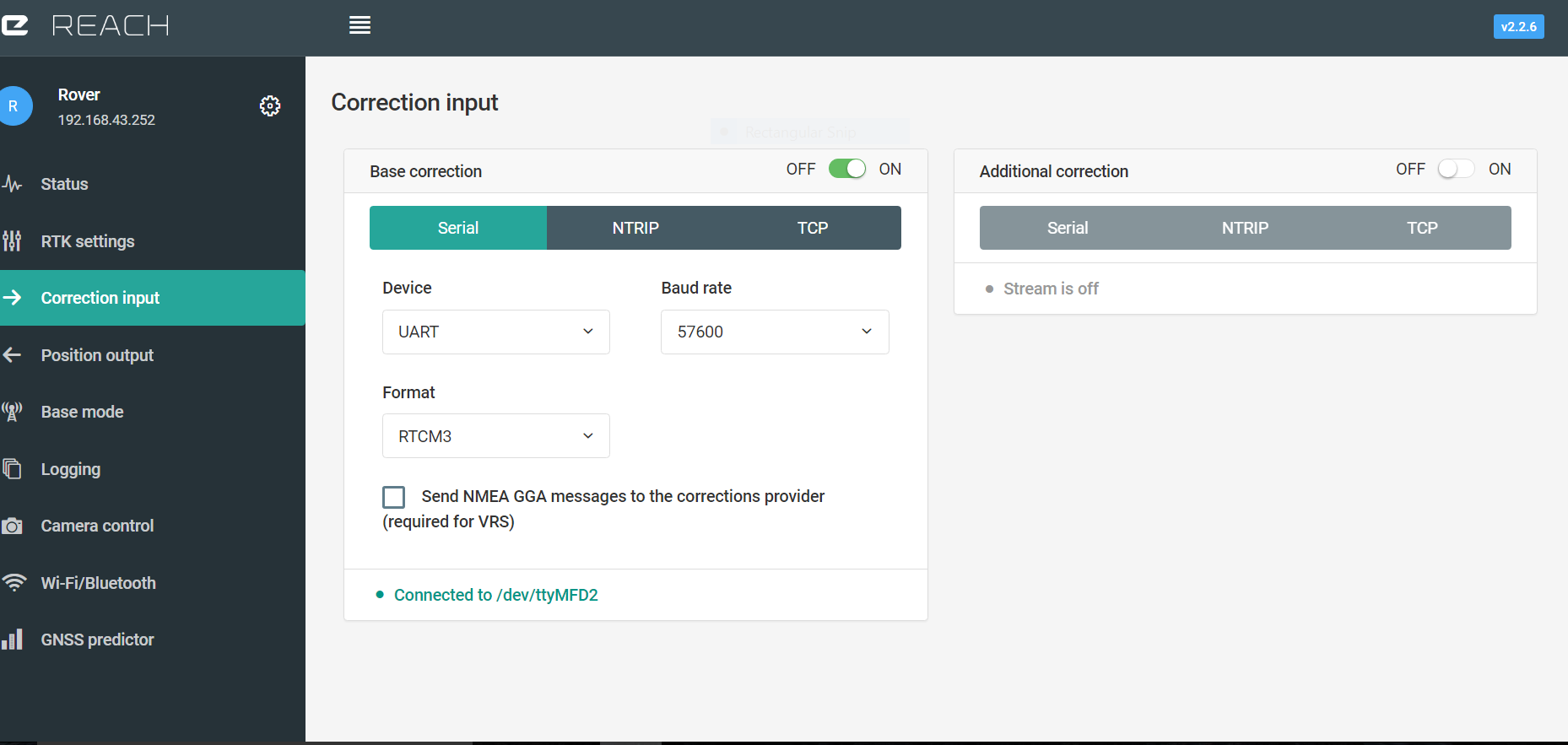
ROVER Set up
: Correction Input: Serial, UART, Buad Rate 57600, RTCM3
:Position Output: TURN OFF
:Base Mode: TCP, Server, Local host, port 9000 (same your in rover or base)
: Correction Input and Position Output: Turn Off
Mission Planner: unsure your running latest update.
Full Parameters List: Serial4 Baud Rate-57 (57600)
: Serial4 Protocol- 5 (GPS)
RTK/GPS Inject prompt: un-tick Inject MSG Type.
I’ve included some screen shots, hope this helps.