I only managed to land the copter at the center once out of 14 attempts, the rest was just “normal” 80-100 cm variance.
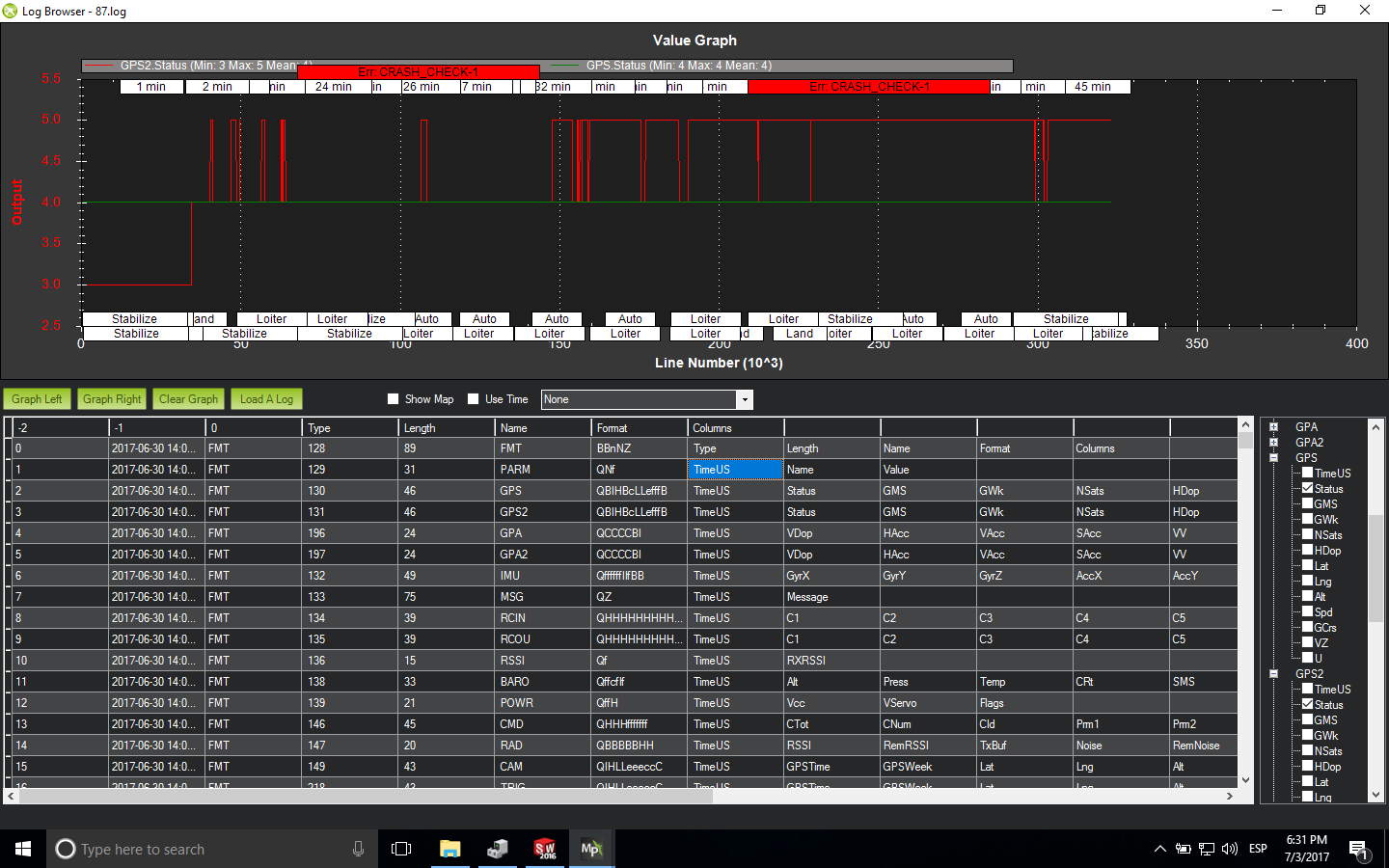
question 1: Where can I check what the gps status actually mean? I read there have been new updates that changed the conventions.
question 2: How can I send corrections and positions WITHOUT using Mission Planner? I need the quad to go to a remote location and land there, without telemetry. I assumed using wifi was another option, but I did not get RTK status, only dgps.
question 3: How can I ensure the Rover and Base connect to my local wifi instead of turning into Access Points? Apparently their antenna is so small they need to be very close to my router so that they connect. Is is possible for them to “keep looking” for wifi until they find it?
@ohiskyy I feel the same frustration as you, lets please keep each other updated
Which ArduCopter version are you on? The changes in status could only be studied by looking at the solution and raw data logs from Reach. Mots common source of issues is radio link, in ReachView verify that Age of Differential is not growing above 5s.
If Reach finds a Wi-Fi network during boot, it will keep looking for it even if it goes out of range. There is currently no way to force certain network on boot as this a dangerous mode potentially.
thanks @igor.vereninov for your recommendations, I will keep an eye on the Age of Differential next time.
If it is more than 5s what can I do?
arducopter is 3.4.6
Back to the corrections, is it possible to have them sent over wifi instead of mission planner? Is it only a matter of changing the Rover settings on Position Output and Corrections input to TCP and provide the Base IP? I already tried this but the UAV only shows dgps.
You can send corrections through any of the available communication channels, it just that Wi-Fi range is quite limited. It should work in the way you described it.
You leave position output as erb on serial and set corrections input to RTCM3 over TCP with base IP.