



Adding another way.
I revisited Mapit GIS, it has distance and bearing buildt in. With this app its easier to do offset survey with all you need in one app.
The procedure is the same as above.
1.You need a straight line with horzontal distance from known point (A) to a uknown point (X)
2.Bearing from A to X. You get this by survey two points and when lined up it will target point X
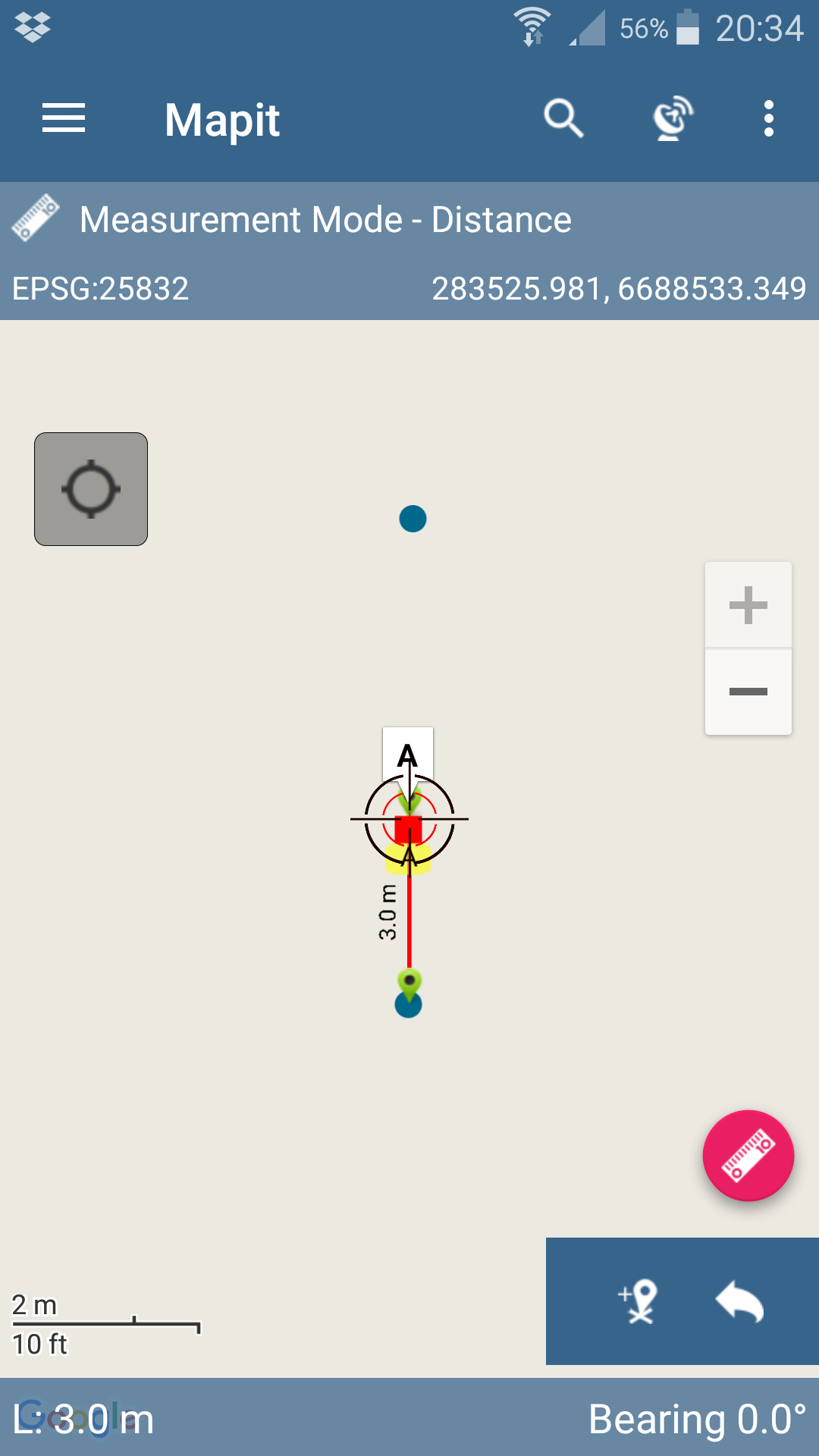
3.Measure distance from any of two known points and and bearing.
With these values added you can add data to create unknown point X with coordinates
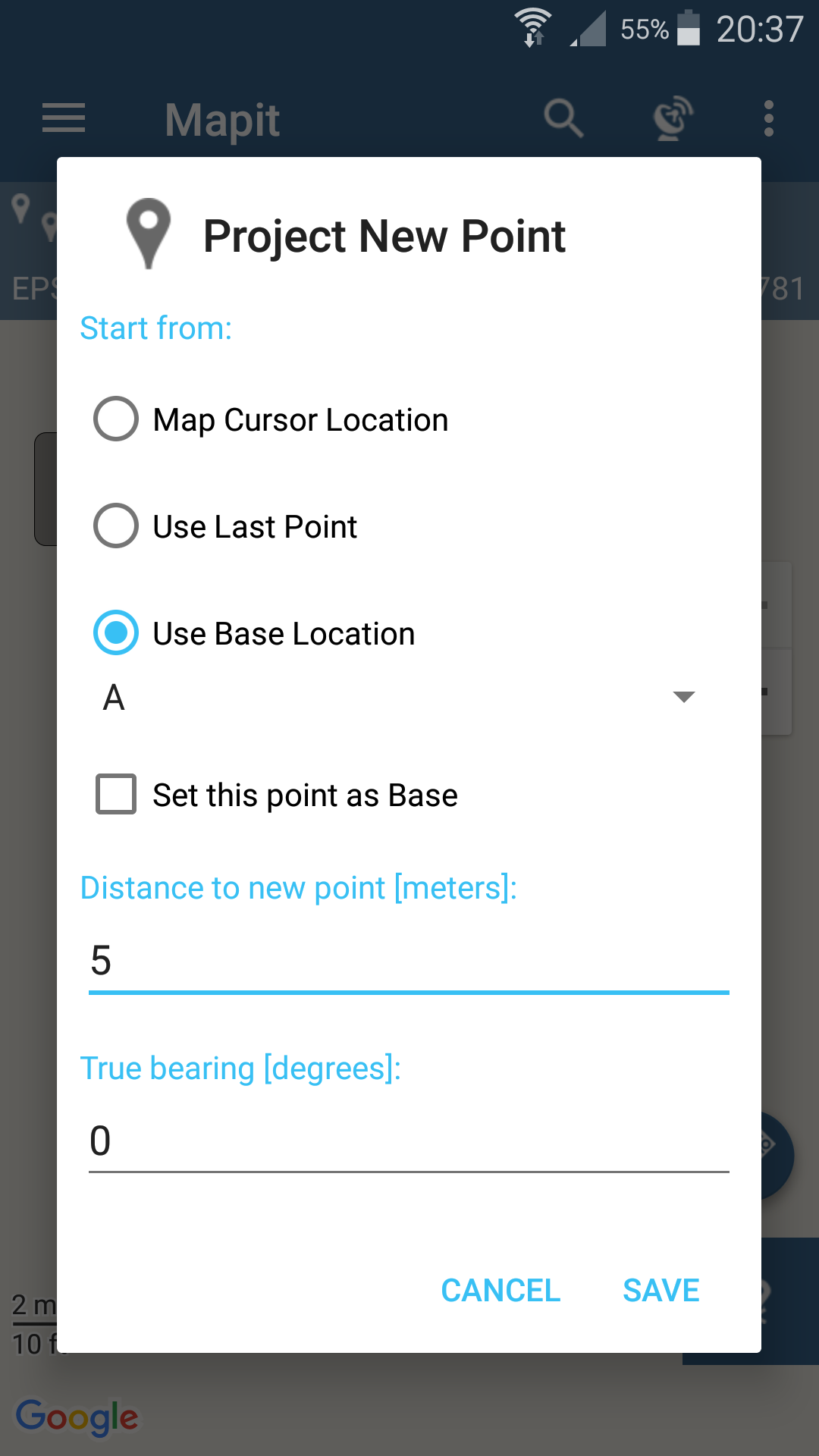


I find this one alot easier then previous method
Poorly explained, but you get the idea