Hi there.
Flow does need the corrections to be within the same realisation to work. If you start a project off in flow it will tell you what the requirements for the corrections are in most circumstances.
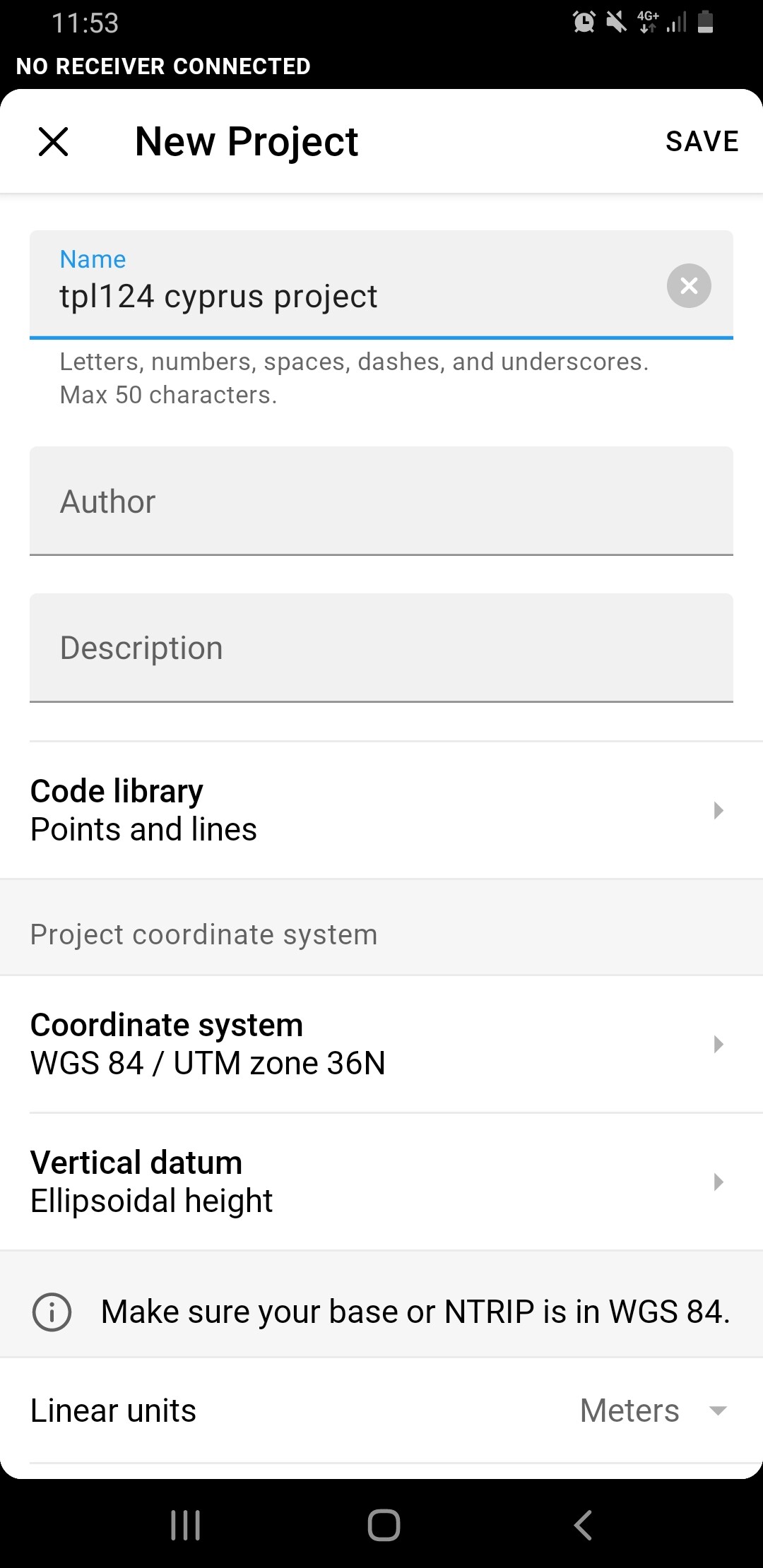
From screengrab for a project setup with UTM36N flow indicates it requires the corrections in WGS84.
That is where you are stuck I’m afraid. For direct input pretty much all NTRIPs are local or plate level realisations, NAD83, ETRS89 or EGSA87 as per your local provider. We deal with maritime stuff and there are WGS84/ ITRF corrections but they are using huge baselines and as a result are around the decimeter level accuracy at best, which isn’t good for you.
You may have a few options. I would say ideally have your own local base locations in WGS84 UTM36N as you have been doing, it will be the cleanest method.
Block shift of NTRIP data when knowing the local base station position in both systems probably isn’t an option due to rotations etc between systems. That links to the next point.
For RTK you could setup a custom CRS in flow with a 7 parameter shift (using the EGSA87 NTRIP) to get you closer, but that is a bit dangerous as the listed shifts can be of limited accuracy. In the UK for example our WGS84 to ETRS89 (OSGB36) stated on EPSG is good at 1m. So this probably isn’t sufficient, as it requires tests etc to get the transformation right. It would also not provide the tie in with your previous data as they are collected and calculated using different systems. That may not be an issue for expanding to new sites but return visits to sites of interest may cause busts in data.
Your GIS package may be able to offer a better solution to collect in NTRIP and add to previous data sets using 14 parameter shifts if you can find an accurate set of values. If you contact Uranus they might be able to offer the conversion parameters, worth a shot.
Flow does have the localisation tool, which may allow for a custom CRS to be calculated. If you have a network of established ground points already, you may be able to get the conversion from Uranus (EGSA87) to UTM 36N. By uploading the UTM36N coordinates into your project and then occupying them in RTK(EGSA87) flow will create that conversion. I’ve never used it, but when time allows it is on my list to go through the workflow. Hopefully someone from support can follow that up and provide guidance on how/ if that could work for you.
How close is your nearest base station from the Uranus network? I can see two on their website in Limassol and Lefkosia, but not sure if the government NTRIP has a better network. If they offer direct download of rinex data you can use this as PPK in Emlid Studio, RTKlib, or any other Post software such as Carlson GNSS. This only works if you have a short baseline for stop and go type kinematic surveys. If the base station is far away then a local base is best option.
If it is close you could download the data you need from their base stations. Upload that data to a PPP service to get a WGS84 position for the Uranus base station. Then use this updated position to PPK your rovers against Uranus (in WGS84). Again this only works for short baselines. The NTRIP service will likely be calculating you a virtual base close by to allow for the high accuracy fix, where using the long baseline in PPK will likely not provide a fix and maybe not even a good float solution.
Hope that helps in some way. I would say using the local base is best, but maybe the localisation in flow might be a winner for you.
Scott