Hello, Emlid Community!
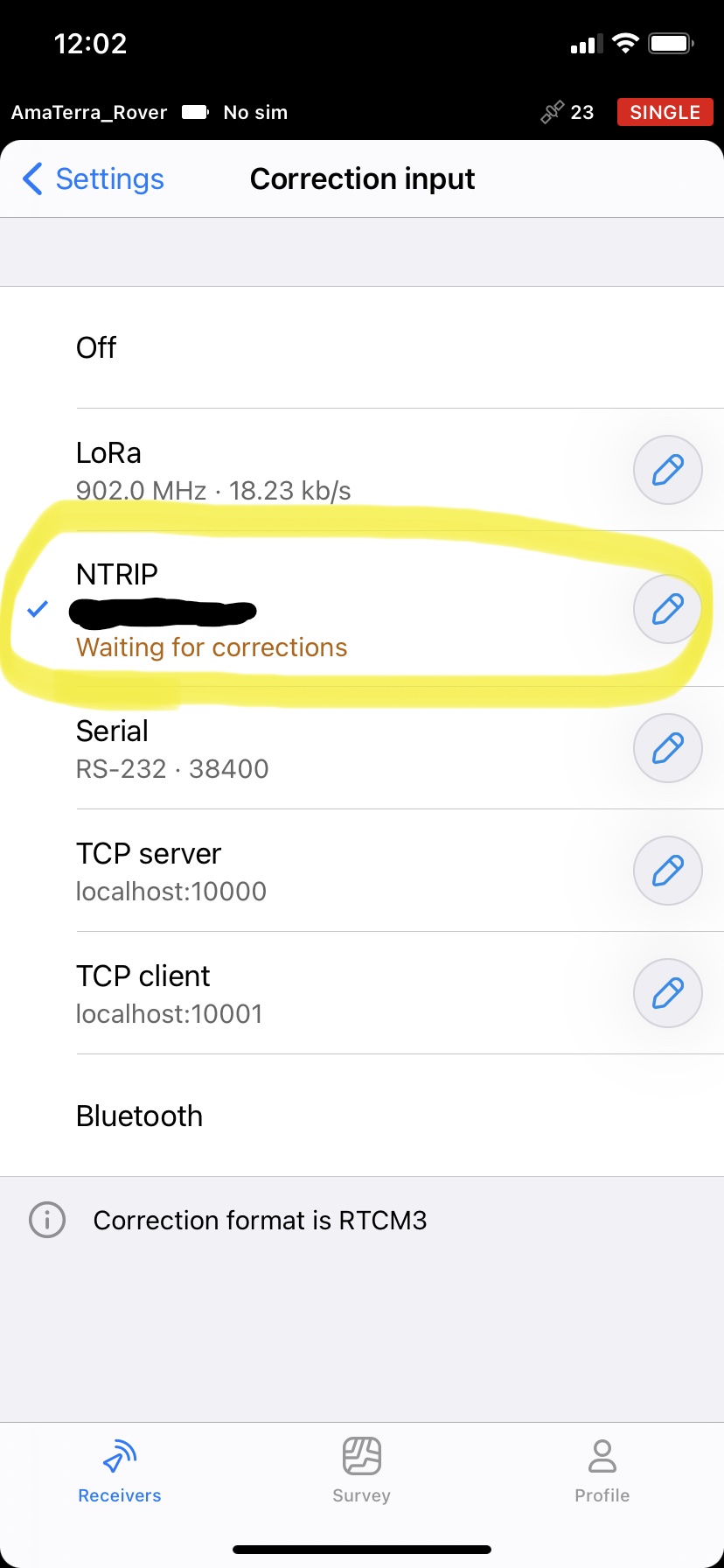
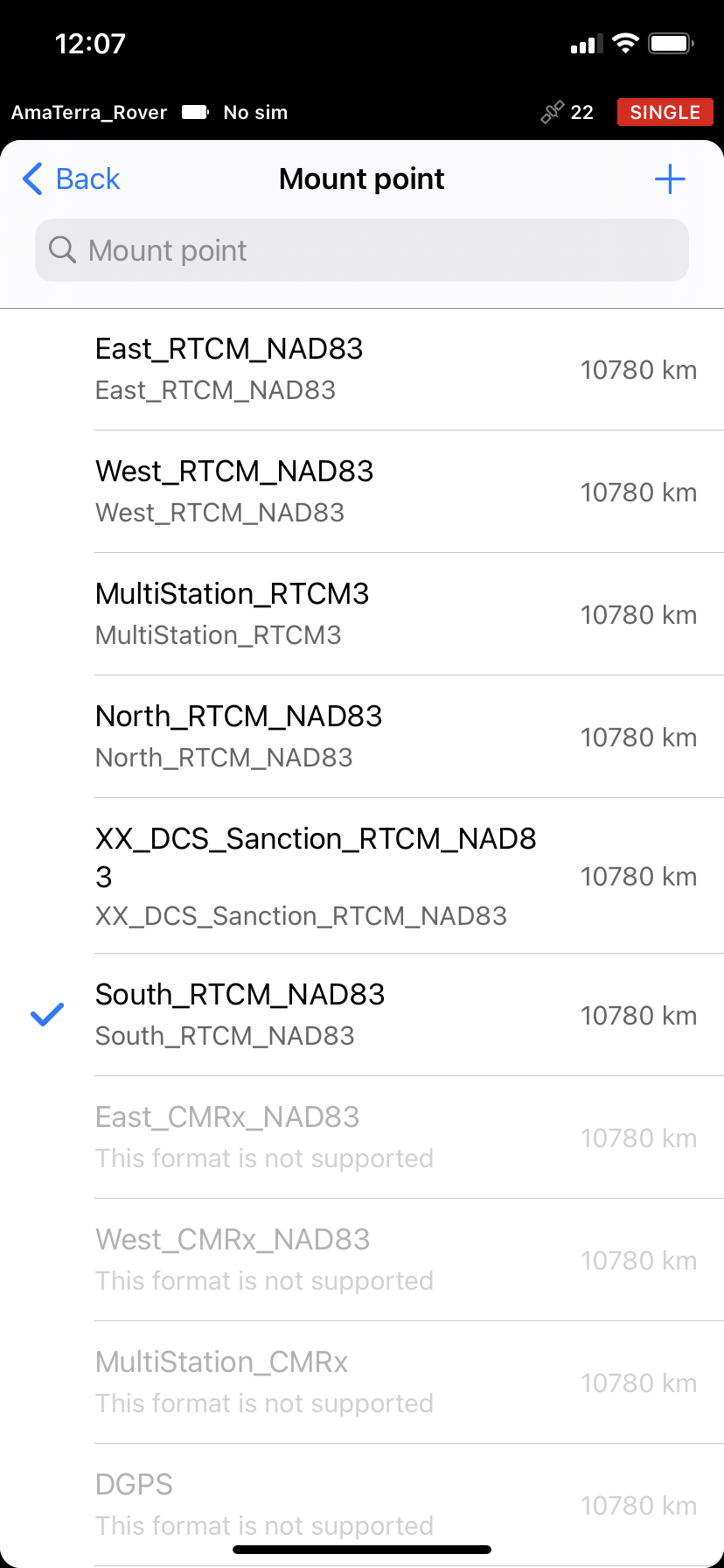
I’m having trouble getting our RS2 unit (running Firmware 28.1) to receive corrections from an NTRIP connection. I can connect to the address, provide my login credentials, and select a mount point, but the app just displays “Waiting for corrections.”
This is the first time that I’ve tried connecting to an NTRIP server on these devices so perhaps I’ve missed a setting somewhere.
I’ve tried connecting through a mobile hotspot and through our office’s WiFi. I seem to have a connection because I can select a mount point, but I’m not receiving the correction stream.
Does anyone have any ideas where I might be off course?
I noticed that the mount points seem really far away but yet I have the “Send receiver’s position to the provider” activated.
I contacted the service provider and they show no record of this unit connecting to their system.
I’m very confused. Thank you for any suggestions.
I’ve added the system report below:
Simple system report
app version: 27.1-r0
current_network:
ip: 192.168.1.151
security: wpa-psk
ssid: ZyXEL04
enabled: true
mode: client
base_mode:
base_coordinates:
accumulation: 120
mode: single-and-hold
output:
io_type: 'off'
settings:
cloud:
mount_point: ''
lora:
air_rate: 18.23
frequency: 902000
output_power: 20
ntripsvr:
address: ''
mount_point: ''
password: '***'
port: -1
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: localhost
port: 9001
tcpsvr:
port: 9000
rtcm3_messages:
message_1004:
enabled: false
frequency: 1
message_1006:
enabled: true
frequency: 0.1
message_1008:
enabled: false
frequency: 0.1
message_1012:
enabled: false
frequency: 1
message_1033:
enabled: false
frequency: 0.1
message_1074:
enabled: true
frequency: 1
message_1084:
enabled: true
frequency: 1
message_1094:
enabled: true
frequency: 1
message_1124:
enabled: true
frequency: 1
message_1230:
enabled: false
frequency: 0.1
bluetooth:
enabled: true
pairing:
discoverable: true
pin: '***'
correction_input:
base_corrections:
io_type: ntripcli
settings:
bluetooth:
send_position_to_base: false
cloud:
mount_point: ''
send_position_to_base: true
lora:
air_rate: 18.23
frequency: 902000
output_power: 20
send_position_to_base: false
ntripcli:
address: 168.44.251.90
mount_point: South_RTCM_NAD83
password: '***'
port: 8888
send_position_to_base: true
username: 57amater01
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: false
tcpcli:
address: localhost
port: 10001
send_position_to_base: false
tcpsvr:
port: 10000
send_position_to_base: false
device:
power_on_bottom_connector: false
privacy_policy_accepted: true
role: null
rv3_banner_shown: false
usage_analysis_accepted: true
logging:
logs:
base:
autostart: false
format: RTCM3
started: true
correction:
autostart: false
format: RTCM3
started: true
raw:
autostart: false
format: UBX
rinex_options:
logging_interval: 1
marker_name: null
pole_height: null
satellite_systems:
beidou: false
galileo: false
glonass: false
gps: true
qzss: false
sbas: false
time_adjustments_enabled: null
started: true
solution:
autostart: false
format: LLH
started: true
settings:
debug: false
interval: 24
overwrite: true
network:
tcp_over_modem: false
position_output:
output1:
io_type: bluetooth
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
output2:
io_type: 'off'
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
positioning_settings:
elevation_mask_angle: 15
glonass_ar_mode: false
gnss_settings:
positioning_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: true
update_rate: 1
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 1
max_vertical_acceleration: 1
positioning_mode: kinematic
snr_mask: 35
sound:
mute: false
volume: 100