Hi Jamieson,
I took a few cracks at your data with RTKLIB and here are my results.
First, I’m using RTKPOST demo5 version b34b from rtkexplorer.com. As I was analyzing you files, to help out I defined expected error circles based on the specs of the RS2 and the baseline. Your baseline is approximately 41.5km which gives a horizontal error of:
4mm + 41.5km*0.5(mm/km) = 24.75mm CEP (50%)
This is equivalent to 51.5mm R95%
Vertical error:
8mm +41.5km*1(mm/km) = 49.5mm CEP (50%)
This is equivalent to 102.9mm R95%
Quick note: I’m using the assumption that the RS2 specs are defined as CEP 50%[circular error probable 50%], as this is how it is specified in the Ublox F9P spec sheet. CEP 50% is essentially stating that statistically 50% of the measurements should fall within the defined range. Converting CEP to R95% where 95% of the measurements should statistically fall within the error range gives a more realistic picture of validating the results.
My first run gave me the following output:
% program : RTKPOST ver.demo5 b34b
% inp file : C:\Users\WDAGUtilityAccount\Desktop\REACHRS2-20210508T085810Z-001\REACHRS2\OEMBase-raw_202105042223_heightAdded.obs
% inp file : C:\Users\WDAGUtilityAccount\Desktop\CORS05042021-20210508T085829Z-001\CORS05042021\njcm1240.21o
% inp file : C:\Users\WDAGUtilityAccount\Desktop\CORS05042021-20210508T085829Z-001\CORS05042021\njcm1240.21n
% obs start : 2021/05/04 22:24:02.0 GPST (week2156 253442.0s)
% obs end : 2021/05/05 00:31:20.0 GPST (week2156 261080.0s)
% pos mode : Static
% freqs : L1+L2/E5b
% solution : Forward
% elev mask : 10.0 deg
% dynamics : on
% tidecorr : off
% ionos opt : OFF
% tropo opt : OFF
% ephemeris : Broadcast
% navi sys : GPS GLONASS
% amb res : Continuous
% amb glo :
% val thres : 3.0
% antenna1 : EML_REACH_RS2 NONE ( 0.0000 0.0000 1.5000)
% antenna2 : LEIAR10 NONE ( 0.0000 0.0000 0.0000)
% ref pos : 39.100665835 -74.802895660 -25.3065
%
% (lat/lon/height=WGS84/ellipsoidal,Q=1:fix,2:float,3:sbas,4:dgps,5:single,6:ppp,ns=# of satellites)
% GPST latitude(deg) longitude(deg) height(m) Q ns sdn(m) sde(m) sdu(m)
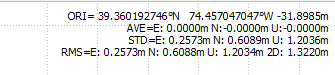
2021/05/04 22:24:02.000 39.360188173 -74.457045059 -32.4036 1 8 0.0004 0.0003 0.0006
I pasted the position file so that you can see my RTKLIB Settings. Only settings that don’t show up here, I chose to interpolate the base (since the interval is high) and chose that the output would only be a ‘single’ point (instead of all epochs).
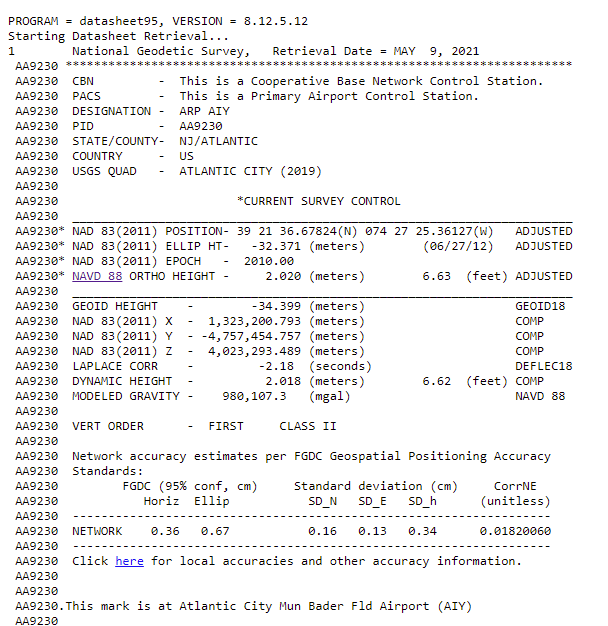
Putting these values into NGS NCAT gave:
[NGS datasheet values]
| Zone |
18N |
| N |
4,356,888.877 |
| E |
546,776.280 |
RTKLIB Values
| Zone |
18N |
Difference |
Square |
|
| N |
4,356,888.852 |
25.000 |
625.00 |
|
| E |
546,776.257 |
23.000 |
529.00 |
|
|
|
Sum |
1,154.00 |
|
|
|
Delta |
33.97 |
mm |
This delta is higher than the CEP50%, but less than R95% and doesn’t consider errors in the setup over the BM. So this is a valid result for that baseline length.
For height, the Delta is 32.6mm, which is within the CEP50% for a baseline of that length.
I did a few more runs with using GPS only, Precise Ephemeris, Changed Iono to Broadcast and and ran (1) Tropo as Estimate ZTD (better), and (2) Tropo as none (best). And looked at the height only. These gave deltas of 20.3mm and 2.6mm, both of which improved on the height. I didn’t run the latitudes and longitudes through NCAT to compare the horizontal improvements for those settings, but at a glance they seemed good. If you need better precision, you likely would need multiple baselines and a least squares method (software) or a smaller baseline. I also agree with the other guys, that NRCAN would probably give you just as accurate a position if you have the time to wait for the precise product.
Unfortunately, I don’t have time to screenshot all of my settings, but here is the configuration file that you can load into RTKLIB (probably needs the b34b version):
BestRun.zip (1.7 KB) .
Main point, I hope this gives you hope that it is possible to post process this baseline from that CORS site. This was a lot of info that I was trying to type fast, so let me know if something wasn’t clear or if I glossed over a point.
Best-