You can “wire” the 232 signal to the 422 shipmodul. If it were a ship you probably would not notice but I find it has a dropping sentences issue with the 232 style wiring.
TTL is 3V this is what the emlid talks
RS232 is -15 to +15 v unbalanced comms is what gps guidance talks
RS422 is 3 to 6 V balanced comms is the shipmodul
But they all are handled by the physical UART on each device (Universal Asynchronous Receiver/Transmitter.)
The data format is the same, but the electrical components before the UART keep it from blowing out.
The ttl to 232, and ttl to 422 converters I am using cost about $2 a piece.
The 422 to 232 converter I am using cost $8.
I cant wait to get rid of the shipmodul I think it is a bottleneck. I find any slower setting than 57600 input from the emlid makes it unstable. The Data coming out of the Emlid is very huge to intake into the shipmodul.
You have the newer version of shipmodul than i am using as well, mine is a Miniplex2. What is your max data rate?
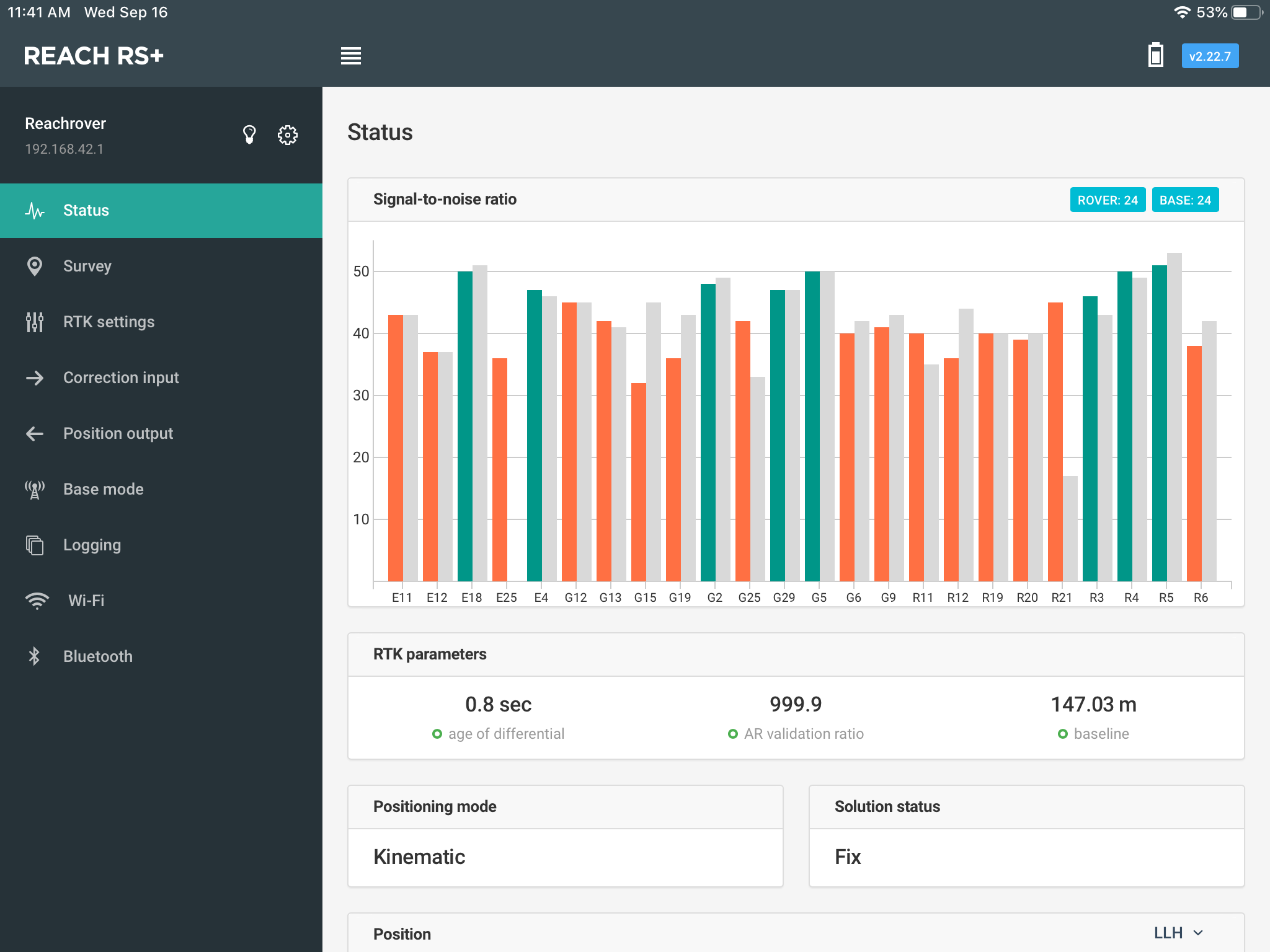
The Miniplex3 has a maximum input of 57600 also, so that is what I am using now. With the RS+ I get to fix in less than a minute and the correction age stays under 2 seconds.
I set the base output back to 1hz and put in the maximum LoRa air rate. The rover setting only goes to 5hz update rate. On the MiniPlex I changed the unused inputs to 57600 and set output to steering at 115200.
The Raven setup menu doesn’t have steering angle, motor speed or free play adjustments. It uses a geared drive ring attached to the steering wheel with minimal slack from there to the front wheels.
I attempted a new setup using the rtk input but it failed to start the in-motion phase because it couldn’t find VTG data when stopped.
Reverting to the WAAS receiver, I did a complete setup and then reconnected to rtk.
I am not sure what new settings made the difference, but the on-line tracking works very well. The intercept is still a little spastic but I expect that is just a limitation of the steering computer. The true test will be this week when I drill rye cover crop. Will let you know how that goes.
This field was approximately a mile from the permanent base I had planned at the home farm. I had driven to it yesterday with the setup in fix from that home base, but went to float as I drove over the hill and behind trees. Today I just set up a tripod on site. No bother really, it is nice to have RTK to go.
The tracking never seemed to be more than 2 or 3 inches off. This error I attribute to the implement drift and auto steer anomalies.
The auto steer has tilt compensation, which performed very well considering some of the cross slope encountered. Not to mention the antenna being 9’ off the ground and only 7’ wheel track.
Setting an AB line on one side of the field, then working back to it for 30 passes from the other side, the row spacing came out exactly right. This over the period of 2 hours. WAAS would have required me to nudge the line numerous times in the same situation.
As has been mentioned by others, all that is needed now is the capability to change talker ID, and select sentences within the Reach. Then it would be truly plug and play. And be easier to eliminate this mess:
Awesome!! Glad to see you are getting some good results.
I know the feeling when the tractor starts driving crazy straight with the emlid, and all you can think is … holdy I just DIY’ed RTK!!!
Good news is you can slowly get dialled in on RTK tuning with the auto steer more cause the position input is predictable.
I think if they did the talker code and sentence selection in the emlid it would reduce lag, we are talking milliseconds here, but every chance for efficiency counts.
Its $2US, Fully Programmable, and the basis for steering control for AgOpenGPS.
It also has ttl input and output. So it can be used as a protocol converter. The hope is NMEA will go in, and TSIP will come out. Then the Emlid would control the entire ez steer lineup! Small Farmers get Excited!