



@hmlab , i don’t think so. I have no need for a 3 axis gimbal right now. But if the need arises I’ll let you know how it turns out 
I’ve spent the last week or so assembling, disassembling, etc. in order to make sure everything is coming together. Once I have a real “final” plan and actually begin building, I’ll post pictures.
Along these lines though, I’m having some difficulty with antenna placement. Specifically, where and what orientation to put the FrSky and RFD antennae. I have Airborne Projects’ 3D printed antenna mount for the FrSky and have seen 3D printed antenna mounts for the RFD900+ (90 degree offset), but am not sure where to place them…top, bottom, front, back, etc. Also, do the RFD antenna need to be mounted 90 degrees offset?
Any input would be welcome.
@JMcCown
So, accodring to the specs on your drone, it looks like you should have only two kinds of antennas, FrSky X8R and RFD900+ RX. Why didn’t you pick up a gps antenna and compass module so that your drone has the ablity to position itself and identify orientation? and also, t-motor mn5208 motor can fit itself into tarot 650 sport, right?
@JMcCown A rfd900 with two antennas, one at 90 degrees, will out perform two antennas same orientation, or one antenna. The rfd900 checks each antenna and takes the signal from the strongest. So if your radio has two radiation patterns to choose from you will greatly increase the probability that one will provide a strong signal.
As far as antenna mounting goes, here’s a picture of how I have my antennas mounted right now…
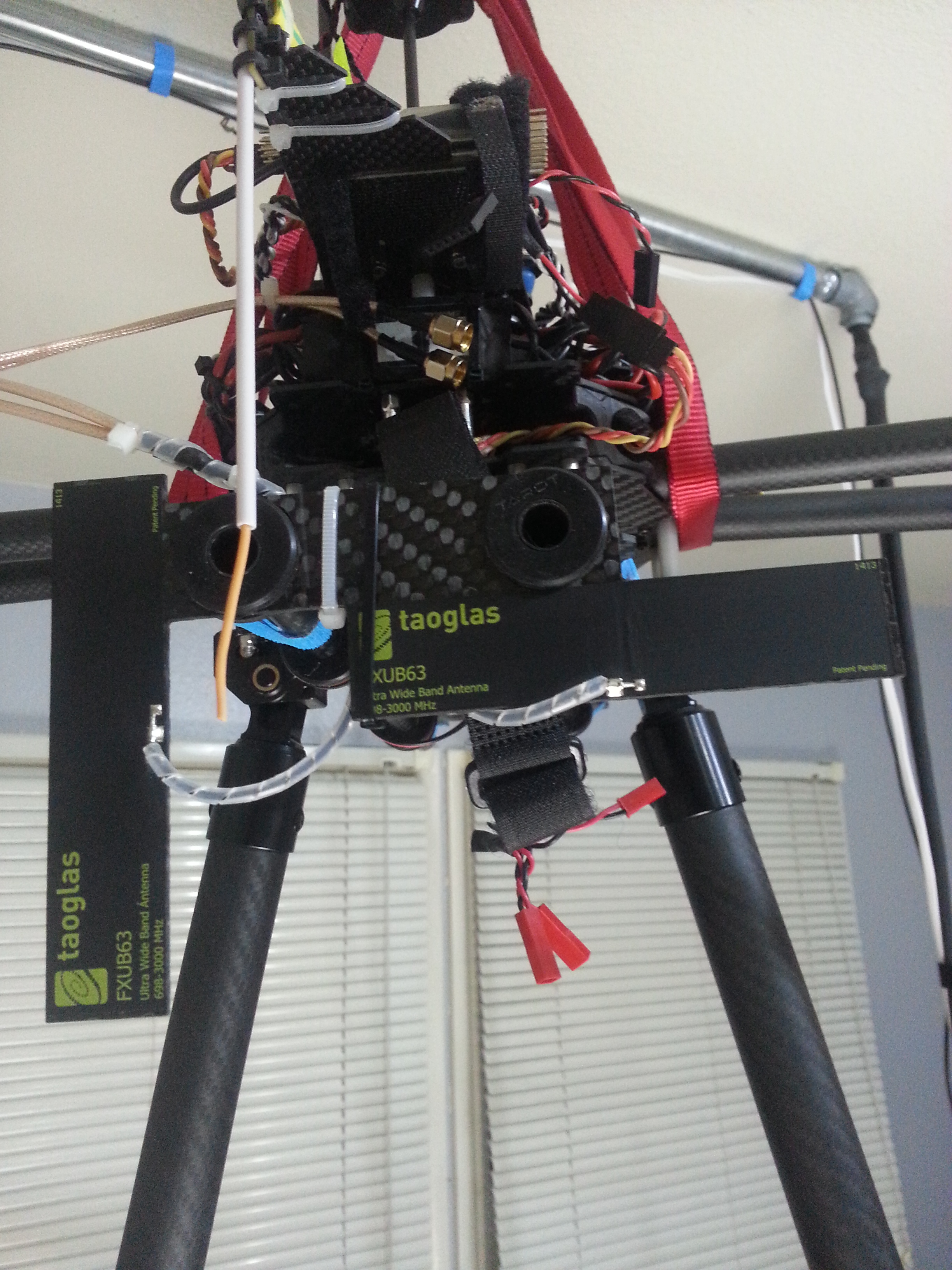
My mistake, the Navio+ has GPS onboard and I ordered their GPS antenna when I purchased the Navio, so I do have GPS onboard. Yes the MN5208 will fit. I am still playing with wiring and ESC placement, but it will fit with the stock motor mounts. If I decide to try an X8 configuration on this frame, the arms will need to extend and new motor mounts will be needed.
If I am looking at this correctly, the two Taoglas antennae are for your GCS telemetry (or possibly FPV), but are not connected to the radio in this picture? Yes?
I’m having trouble seeing your other antennae. What is the wire in the tube that looks like a straw?
For now I am considering attaching the stock RFD900+ antennae below the battery carriage (front or rear?), and the FrSky antennae below on the opposite end. Like so: /\ with a 90 degree offset.
If I may ask, what is the overall rotor to rotor dimension on your build?
Also, you mentioned earlier using an external barometer. Would it be a problem to mount this on the underside of the GPS antenna platform?
The taoglas antennas are for the RFD900. Correct, they are not currently connected to the RFD900, its on another unit right now. I just want to show you how I had placed my antenna.
The antenna in the “straw” is a v2 dragonlink UHF receiver antenna.
I would definitely give your frsky priority antenna placement over the RFD900, 2.4ghz does not penetrate as well as 900mhz. But I have never used a frsky radio, I’m just basing this off my experience with 2.4ghz.
rotor to rotor is about: 750
There are two issues with the baro in general, this is not specific to the Navio.
1st is the low pressure bubble (this is really only a problem on some frames) :
This is addressed by raising the baro or baro reading outside the low pressure area. So if the underside of your GPS mount is outside the low pressure area, then yes mounting there should be fine.
2nd is inaccurate readings due to light and small rapid pressure changes:
This is addressed by encapsulating the baro in foam that still allows the outside pressure to be detected, but cuts out the gusts of air and sunlight that throw the baro off.
In fact the Navio makes solving these issues much easier. If you want to install a static tube, it is MUCH easier on the Navio vs Pixhawk, and the external baro is easier than a static tube, you change one character in Arducopter from a 6 to a 7 and recompile, done.
Remember to try just a piece of foam secured over the on board baro before you mess around with any of this. On most frames this is sufficient.
@JMcCown and others. I am very interested in this build. I am a newbie also but have been doing many months of research to find the right components. I am looking to lift a mirrorless camera with 2D gimbal but still have 20-30 min flight time. Seems like with enough research and the right components this will be possible. I also use precision GPS equipment using L1, L2 and Glonass everyday and would like to pursue adding RTK or at minimum collect data for post processing to georeference images.
I am planning to build the quad copter with 15" props make sure everything operates as it should then convert to an X8 for more lifting power. I am in the same position as you and would like to use the same motor for my quad as I eventually use of the X8.
I currently have:
Tarot 650 sport frame
Pixhawk Flight controller
FrSky Tranis X9D Plus Transmitter
FrSky X8R reciever
My questions:
I am wondering why you decided on the T-Motor MN5208. (not questioning you i am just trying to make up my mind). I am going with T-motor for sure but struggling with what model to use. Comparing efficiency with thrust and amps drawing starts to make your head spin after a bit. I have also been playing with ecalc.
I have also been playing with ecalc.
Are you planning to add an arm extension kit to allow for the 17" prop? Still not sure if i need anything bigger than the 15" based on @aquila post below.
Have you came up with any other info to use L1/L2 receivers? Seems like there hasn’t been any discussion here. I know it is possible because the bigger name brand manufactures are putting it in their UAV’s but they want WAY to much for their systems.
Thanks your time.
Guys
I’ve started on the same build. Right now I have the 650 frame, Taranis X9D Plus, X8R receiver and a couple of Raspberry Pi Zero boards along with a Pi 2. Just waiting on the Navio2 to arrive. Going to build a video surveillance platform hopefully