I am using reach m2 as rover on drone , I provided the correction in RTK from my base using radio connection
1-Emlid was float in each time , Never fixed
2-14 triggered points and 14 photos are obtained but only 11 event are obtained in post processing using Emlid RTKLib
Camera Sony Alpha600
flight controller Cube black
trigger cable - Seagull MAP2
To help us check why the rover wasn’t able to achieve a Fix solution, I’d ask you to share the following info:
the photo of the hardware setup
the raw data log, the base correction log and the position log from the rover
the raw data log from the base
the SImple reports from both receivers
This data will help us check the observational quality of the receivers, if corrections are passed correctly to the rover, what the solution status was during the survey.
Do I understand correctly that you’re using the latest RTKLib version from our docs for post-processing?
I believe to determine why the time-marks were lost we need to see the photos of the hardware setup and the raw data logs as well.
Do I understand correctly that your receiver is updated to the latest v2.22.5 firmware version?
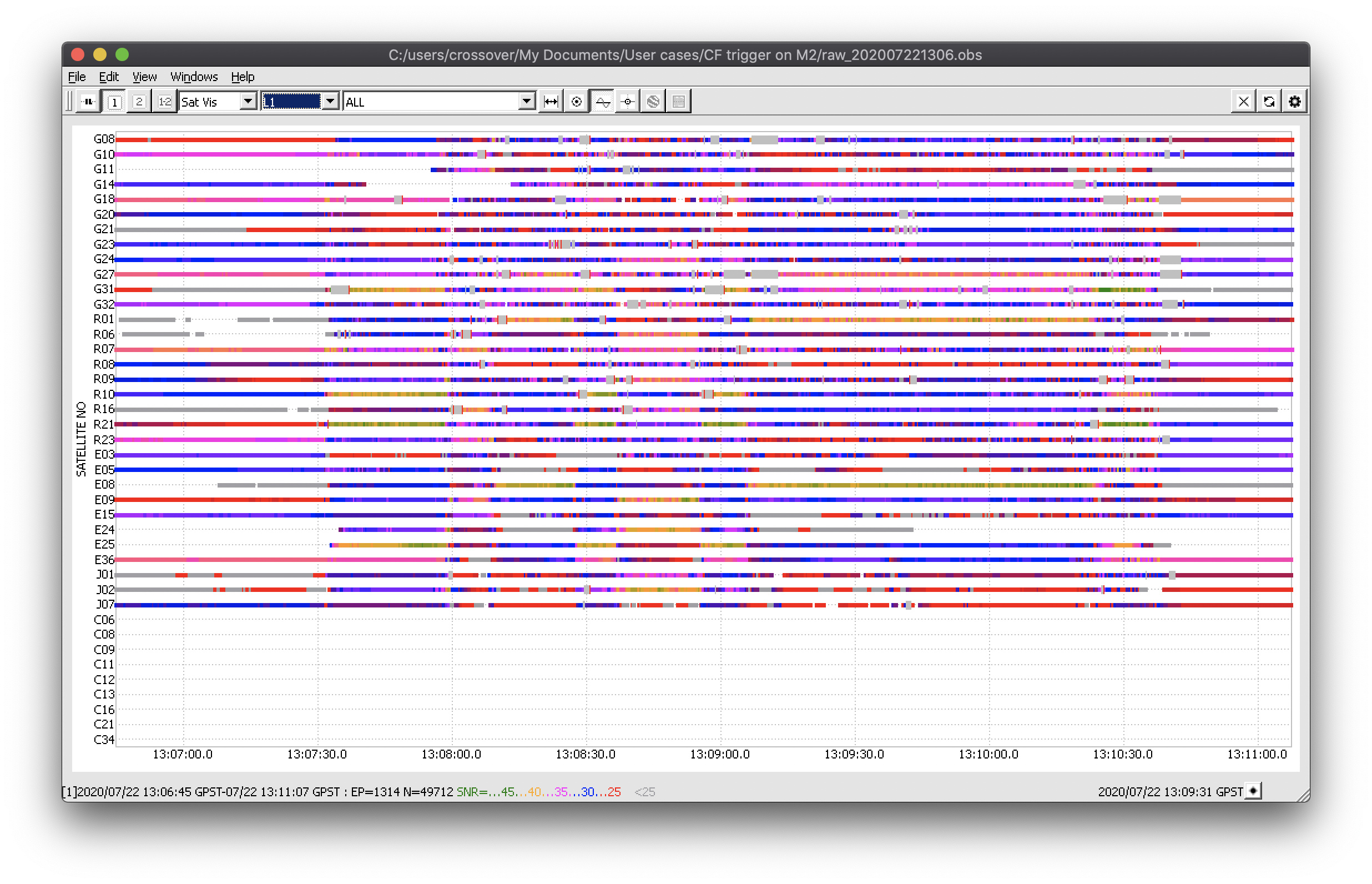
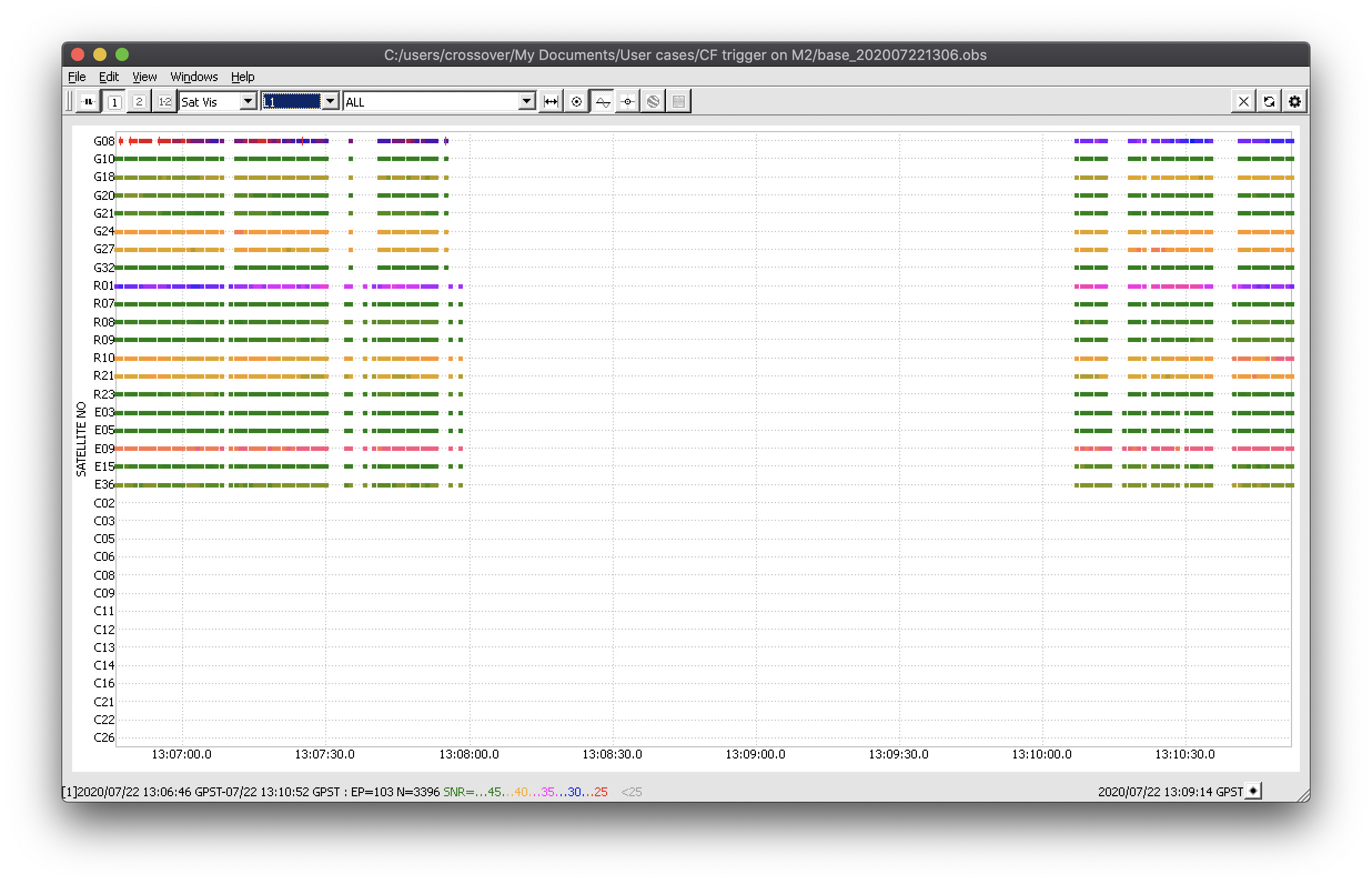
I’ve checked your data. I’ll attach the screenshots below.
You can see that the quality of the observational data from the rover is rather low. There are no satellites that have SNR above 35 during the whole survey. Also, there are cycle slips present that mean that the signal gets interrupted, and the receiver loses track of the satellites.
Such data quality is usually caused by the inappropriate antenna setup when the signal gets blocked. Could you please attach the photo of the hardware setup so that we could check what affects the signal?
According to the base log, the signal is frequently lost. I’d say this could also happen due to the setup issues when something blocks the radio signal from the base. Could you please explain how you transfer the corrections?
Such rover’s quality does prevent you from getting good post-processing results and may result in time mark loss. I’ve post-processed your data and got 11 events as well. However, the majority of them are in a Single solution. I’d recommend checking out this guide to see how you can improve the overall observational quality.