



Hi Everyone,
@polina.buriak
I get 2 answers from applanix. this is the first one :
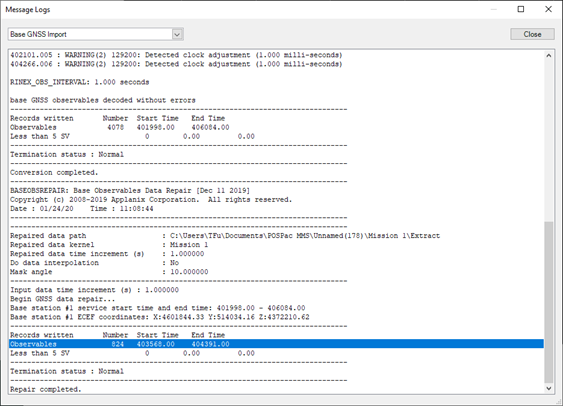
The RINEX file is missing a lot of L2 obs, and you can tell when POSPac is trying to do base data interpolation: The time interval goes from 401998 - 406084 to only 403568 – 404391.
This lines up with your original theory …. The issue is this antenna does not record L2P frequency, I am waiting for a follow-up comment from development on the next course of action, I will keep you posted.
And finally, the second one (received this morning) who confirm that L2 is missing many epochs :
FYI … Data files must contain dual-frequency pseudorange and carrier phase observations (L1 and L2).
L2C is fine, but this doesn’t sound like an issue with the antenna itself. It looks like it is missing many epochs of L2.
…look like I will have to buy a REAL antenna…