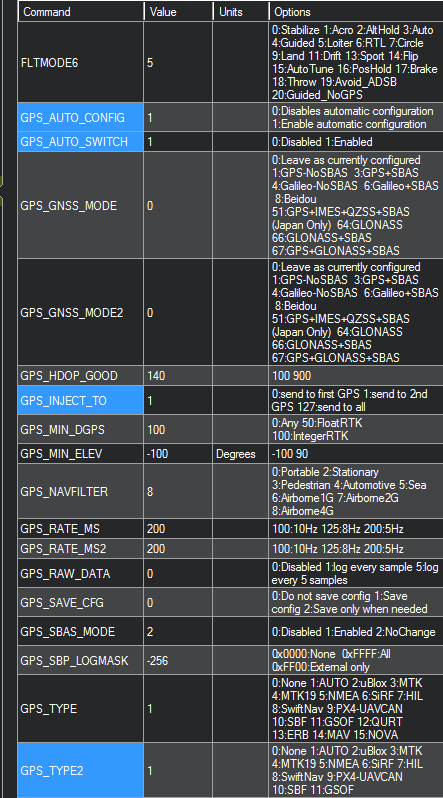
Please check that parameters for Pixhawk are all according to the guide, that you have connected Reach to the correct port on Pixhawk and that the wiring is good.
Pixhawk is not relaying corrections to Reach, thats it.
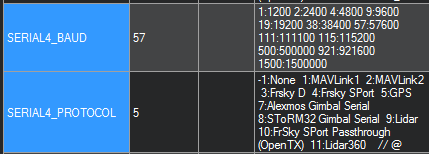
I also changed the port of the reach unit from Telem2 to Serial 4/5, this gave me gpsstatus2 = 0.
when i changed it back to Telem2 (also changed the params in MP) i got a gpsstatus2 =4.
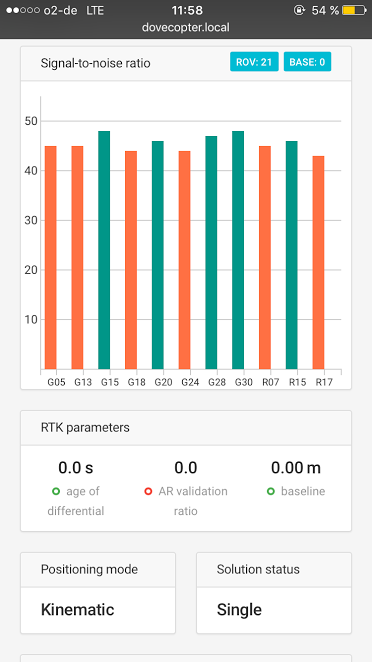
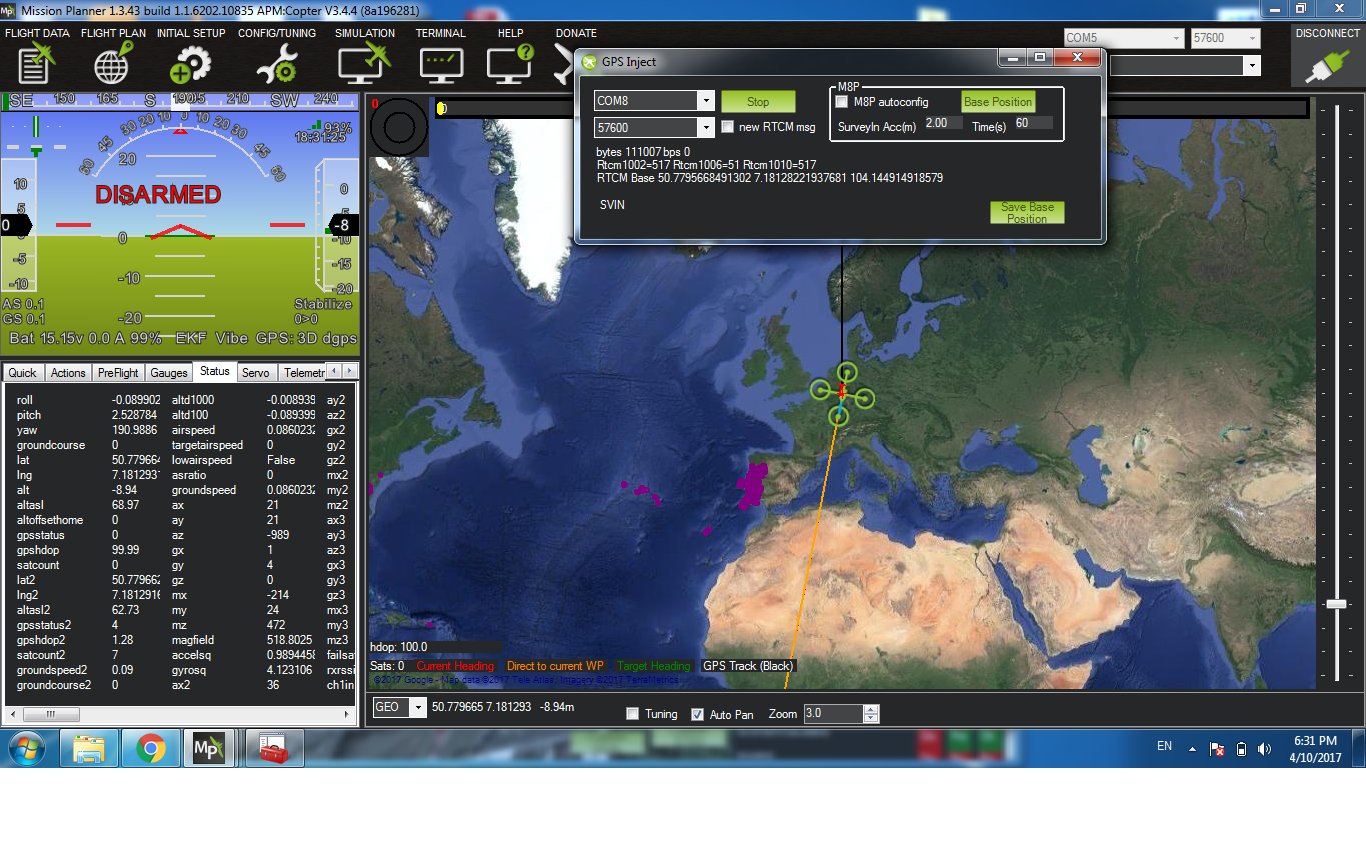
The GPS injection window indicates its injecting, however the solution is always single and the base count is always 0. Another thing as well is that “base correction” log for the rover unit is 0kb, which kinda indicates that there is no data from base.
I have absolutely no idea what more to do… i tried all possible settings, i read all the other posts regarding my issue and still no solution…
This is unbelievably frustrating
Injecting means that Mission Planner is putting data from base Reach into telemetry stream. Injection indicator does not guarantee that corrections are delivered to rover Reach.
These are all due to one thing, Reach is not getting corrections from Pixhawk.
That is great! This shows that you have done the right step. Can you again go to the configuration when you got gpstatus2=4?
You wrote that at some point you got gpstatus = 4. What is it showing now? When you get gpstatus = 0 that means that pixhawk parameters are sent wrong.
i started with the connection in Serial 4/5 and tested, thats when it gave me gpsstatus2=0. i turned the drone off, changed to Telem 2 port then changed the params in MP and turned on the drone. Almost immediately gpsstatus2=3/4
I kept the drone on for approx. 15 mins and it always said gpsstatus2=4
i was processing some of the log files from yesterdays test and i plotted the .pos file for my rover.
There is an indicator in the generated .pos file which indicates the quality of the data, that is Q.
For the first part of the file i get a Q=5 which is Single solution but then i get Q=2 which is Float solution.
Does this mean that the rover was receiving corrections but the reachview and MP were wrongly informing me otherwise? or this Q=2 “thing” is not related to my problem?