Greeting every one
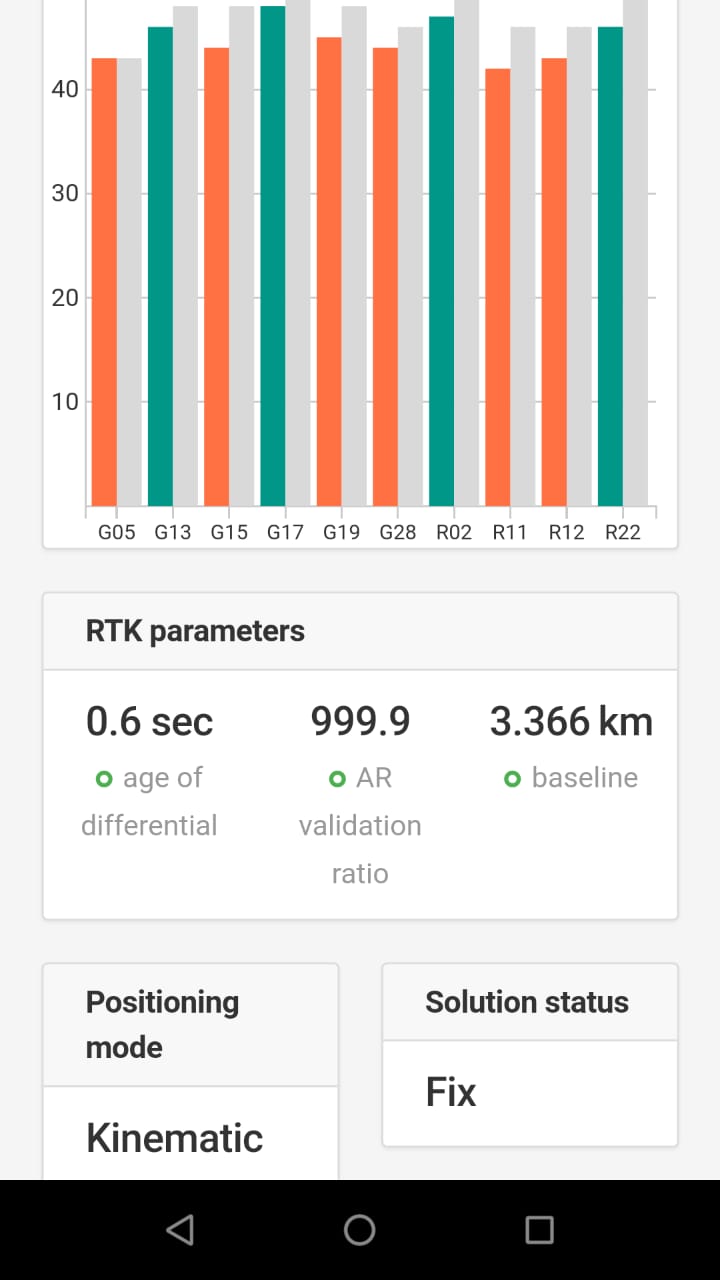
I have two reach rs+ devices, my problems I can’t get fix solution all the time single, but when I used it with our local ntrip it is fine and give fix solution.
Surveying done at open place and clearly sky
My location Saudi Arabia Medina city Lat= 24.426621 Long =39.611174
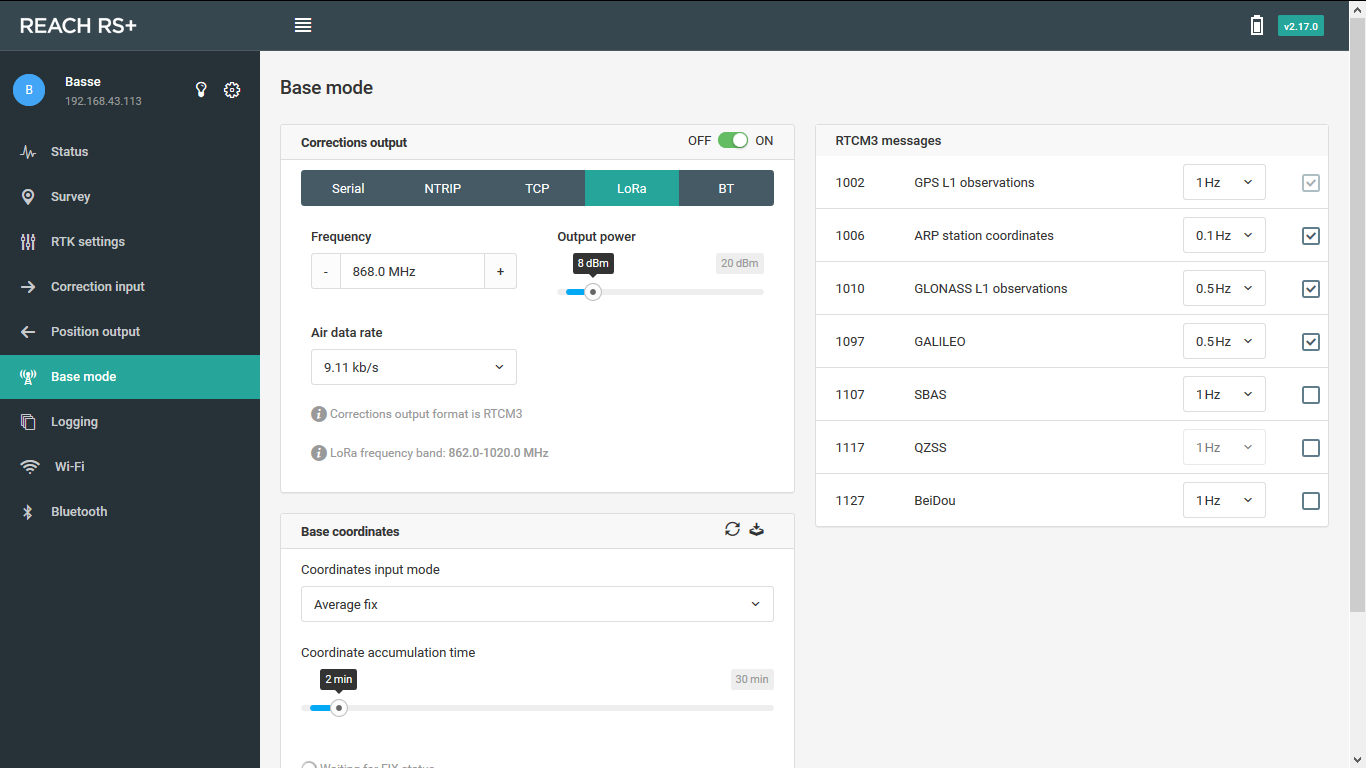
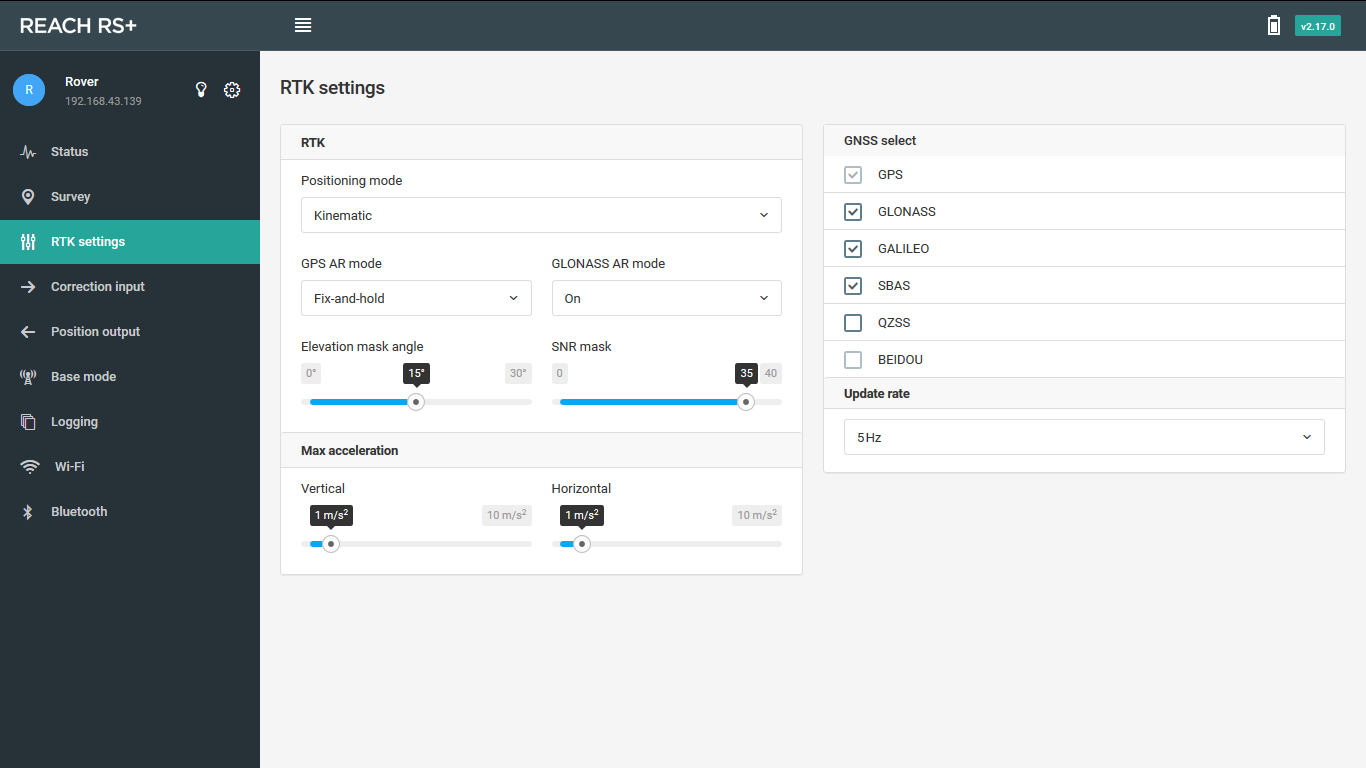
Attached my settings and system reports
There are few options you can do.
1.place base over a known point and fill in coordinates manually
2.average FIX and use ntrip and feed base with correction via “correction input” menu
No. Just average a single solution. +/- 1m ish for base.
Rover of course, relative to base will be accurate.
But no absolute accuracy unless you have set base with accurate coordinates.
If you didn’t try average single how do no that is not accurate? A 10 to 15 minute observation should be plenty accurate. I always prefer a known point, but understand that is not always possible. Sometimes you just have to settle for high-precision relativity and then transform the coordinates to other known data on the back end.
FLOAT is better than SINGLE, but FIX is better than both FLOAT & SINGLE and BEST.
But… in order to use FLOAT for your BASE, you need to use NTRIP in addition, so might as well set as FIX and use NTRIP if <15km for your base. Otherwise FLOAT & NTRIP <100km, but again, you’ll only get 1.0m accuracy, so no point using FLOAT & NTRIP if you can use FIX & NTRIP and get 7mm+1mm/km accuracy.
Or if you have a KNOWN POINT, that is obviously BEST.
As the docs state, no matter which method you choose, the relative position of the ROVER will always be cm-precise. So your actual accuracy will always be determined by the accuracy of the BASE. So if you can set your BASE on a KNOWN POINT, that is absolute BEST.
I think it’s because he gets a FIX using NTRIP, but he wasn’t clear about the accuracy if NOT using NTRIP or a KNOWN POINT.
Wishful thinking for a future multi-freq product from Emlid… I would assume that is in the works and cannot wait also! I could see Emlid making that possible even at double cost of the current RS+ ; )
Is it possible to calibrate base with a rover collection point or perhaps this is a feature that can be added? Two reach units, base and rover running in RTK mode. You setup base like Mohamed and start surveying. Your base coordinate can be set as you wish regardless of accuracy in this case. However, during surveying you hit a known point with your rover. Occupy the point for given amount of time and then input the known point. The software could then adjust parameters and base coordinate accordingly. I have found many of my known points are not in locations I would prefer to set my base at unoccupied for a long period of time…