I am new with Emlid Reach. Our quadcoter use Sony RX100ii connected to pixhawk with Seagul wire and to Reach rover with Tuffwing wire. The setup worked on ground.
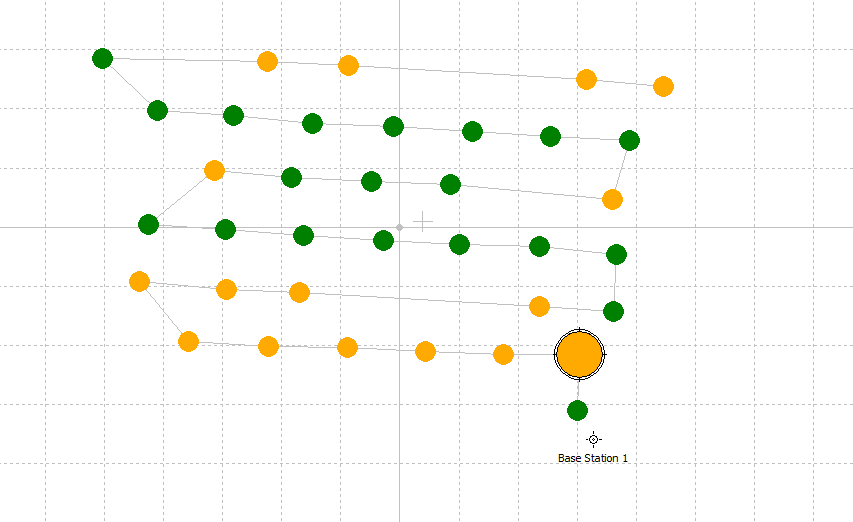
But in our first test flight, we found many photos did not have GPS data (shown as yellow dots). The quadcopter only fly at 20 m high, and 5 m/s speed, and it’s in a open space. Is this (no GPS data) because the Rover and Base lost connection, or something on Rover not working?
If I use TW 3710 to replace the Base antenna, will the connection between Base and Rover be improved?
In post processing there is an option to include single fix solutions where you have no RTK, this will fill the gaps, but beware their accuracy may be poor!
The science (and art) of RTK.
try setting your mask low (5 degrees) look at the SNR from satellites and set up a profile that rejects the low SNR ones by SNR and Elevation.
Then tweak away, try, forward, try backwards, try combined, Try (for mobile aerial platform) continuous AR rather than fix and hold…