



Hey there!
Since @TB_RTK started this thread, we were interested in replicating it here nearby our office in urban environments.
So finally I replicated the “Fix-and-Hold vs Continuous” test a couple days ago with the great help of @andrew.yushkevich.
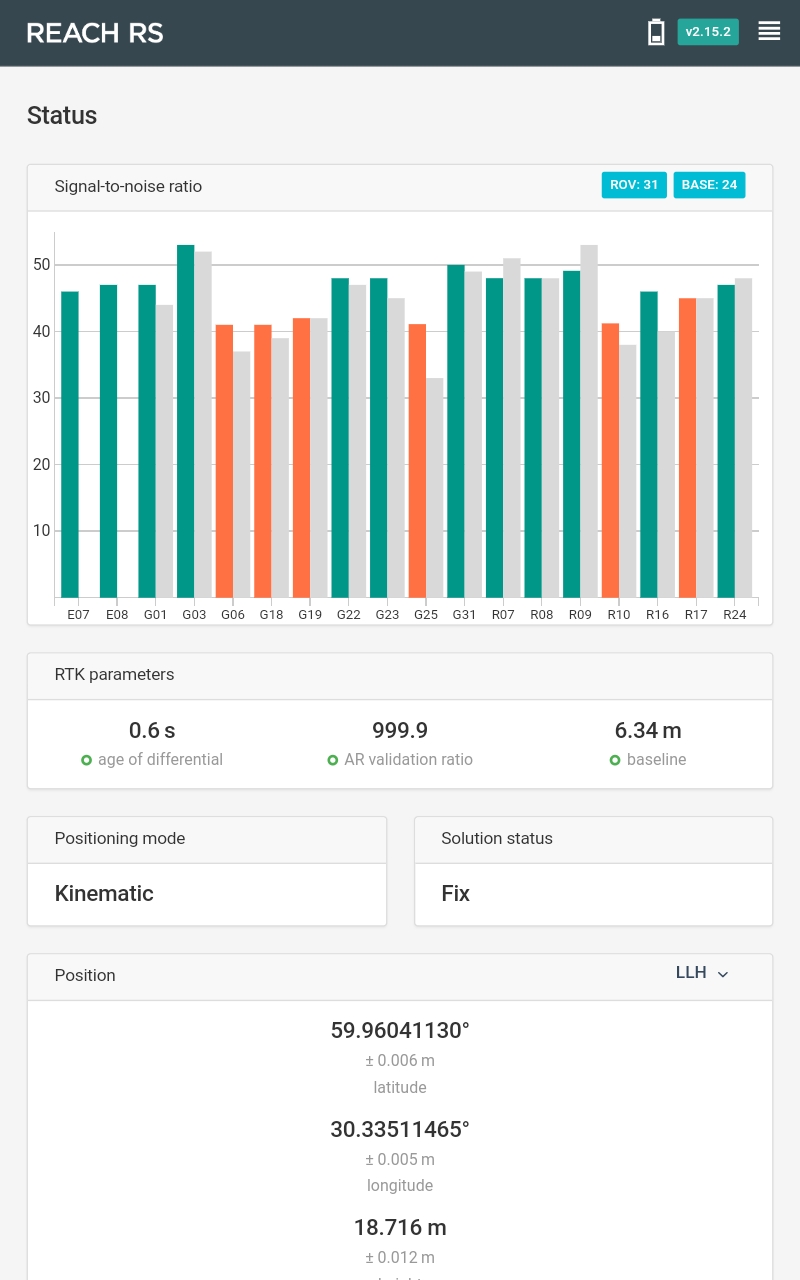
I used 2 Reach RS units with ReachView 2.15.2 dev version.
The base position was averaged for 10 minutes.
RTK settings for both base and rover were:
- elevation mask is 15 degrees,
- SNR mask is 35,
- GLONASS AR mode ON.
GNSS select: GPS, GLONASS, GALILEO, SBAS, QZSS with 5 Hz frequency update rate.
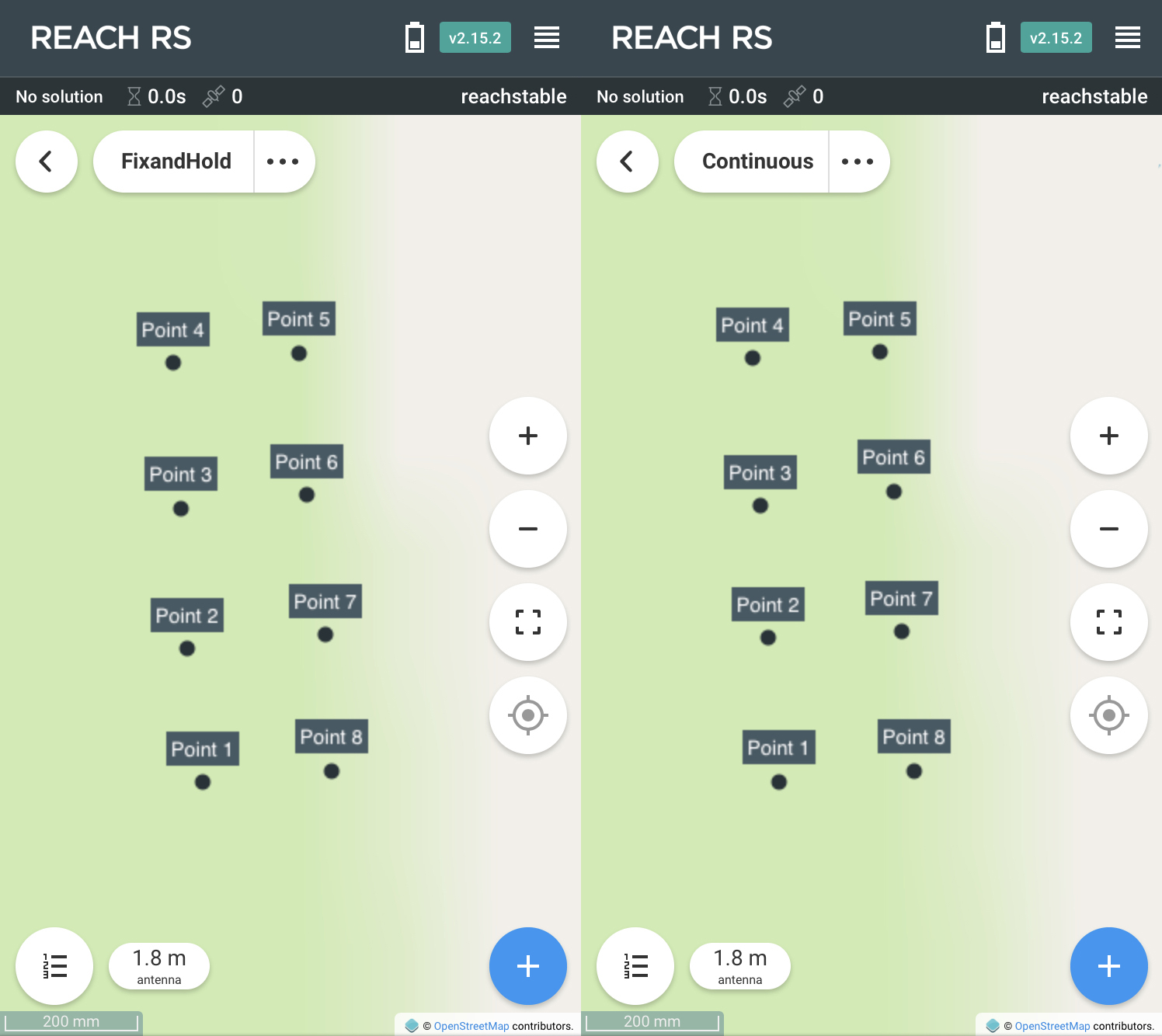
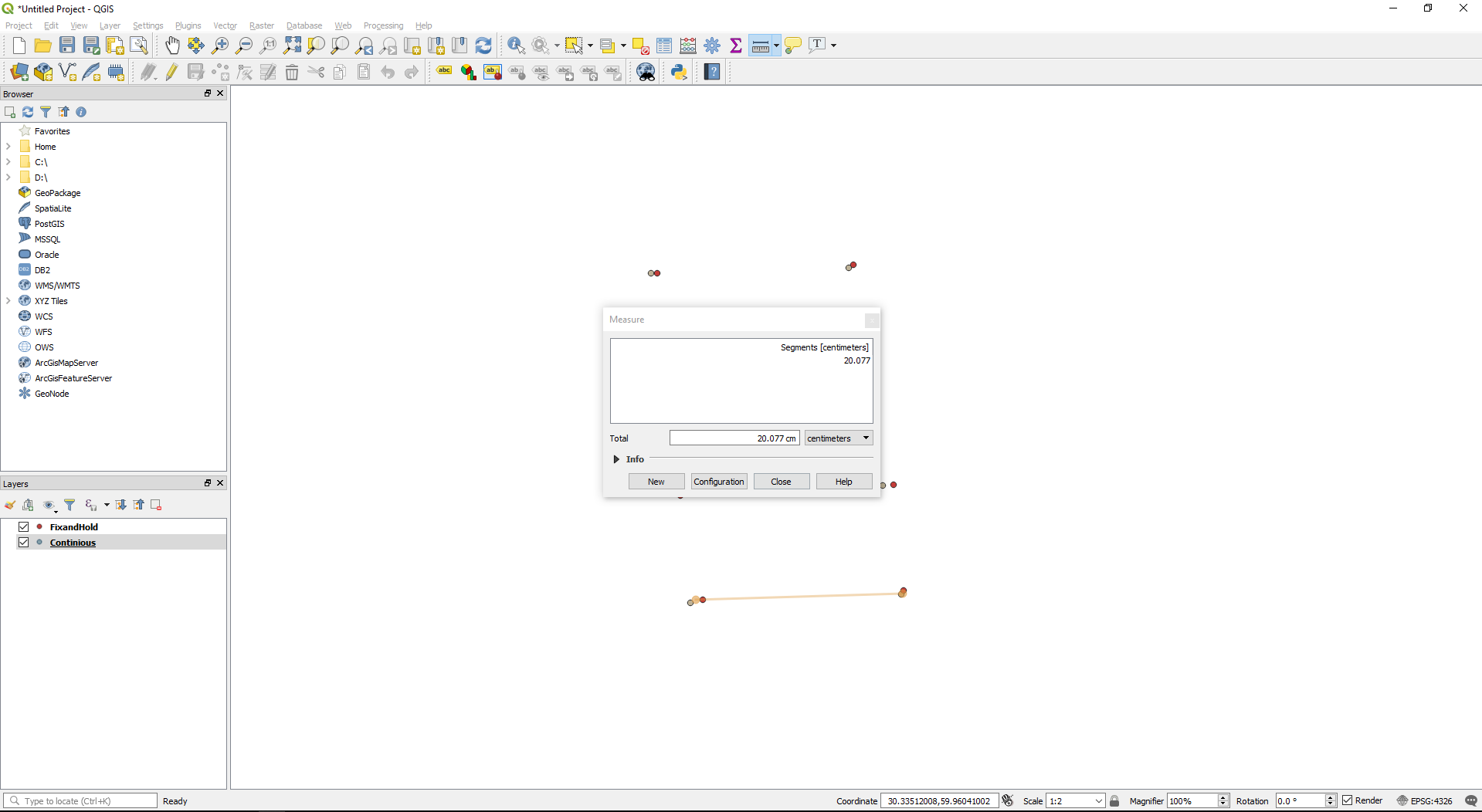
I used the grid you can see in the image below. I collected points with 20 cm spacing between them as in the @TB_RTK test.
Each point was collected for 1 minute using the Survey tool of ReachView app.

I had fix solutions for both Fix-and-Hold and Continuous during the survey process.
Here you can see the result of both Fix-and-Hold and Continuous surveying:
Imported to QGIS results:
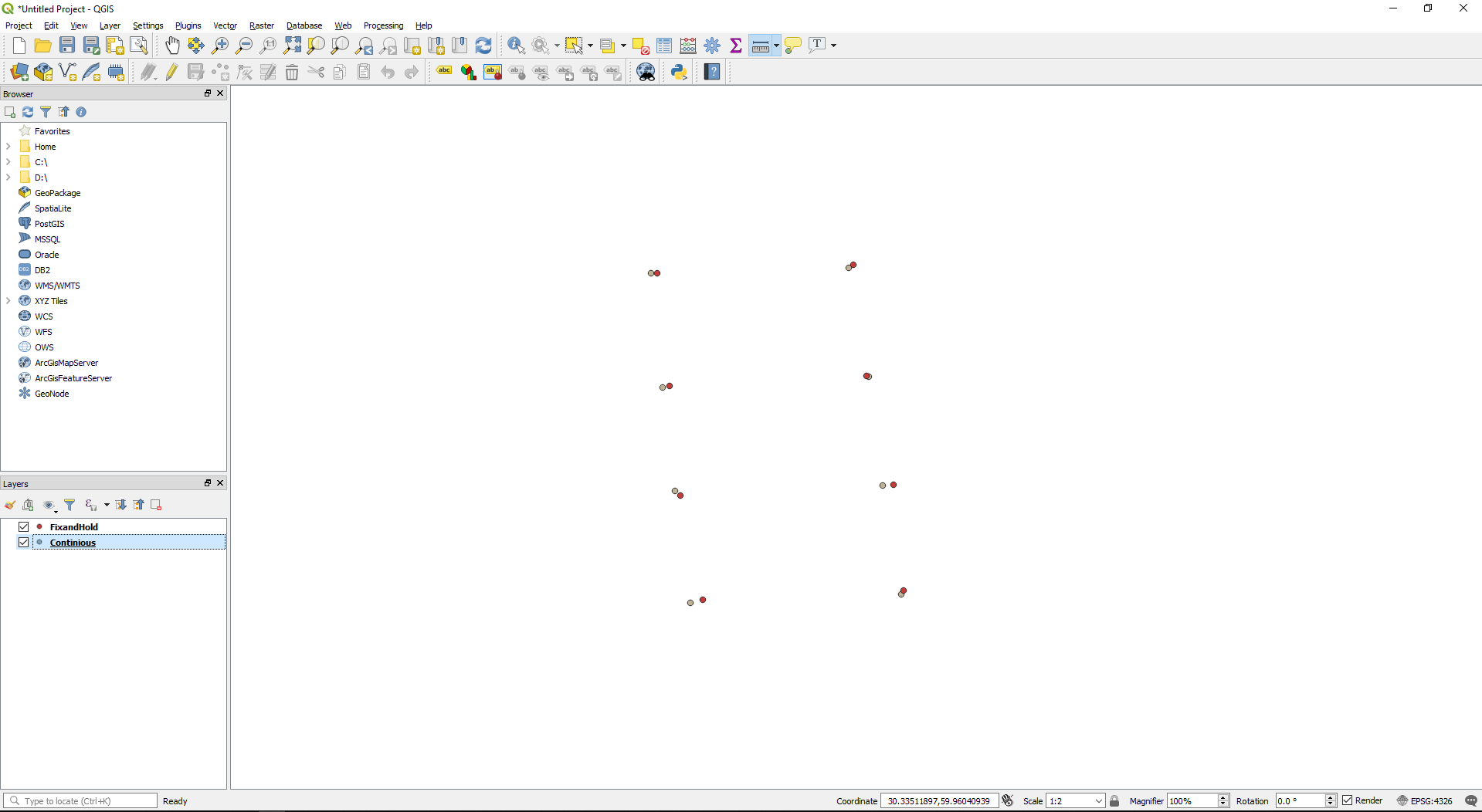
As you can see from the screenshots above, I didn’t manage to get the shift in a position for both Fix-and-Hold and Continuous.
So I think we can’t fairly judge that Fix&Hold is not as good as Continuous. Data quality depends on environmental conditions, settings and many other factors and in some cases switching between 2 RTK modes won’t give the desired result.
In the end, no matter what mode you use, here are some general tips on how to make sure you collect good data:
- Double check your settings for both base and rover before work
- Before starting data collection make sure you have a good fix with high AR ratio
- Spend some time on each point (at least 40 seconds when you have a fixed solution)
- Double check data with post-processing when back in the office. Learn more in our PPK Guide