DIY offset rig with Disto laser. Step 1 Survey
Had an ide and thought i would see if i got any usable data out it.
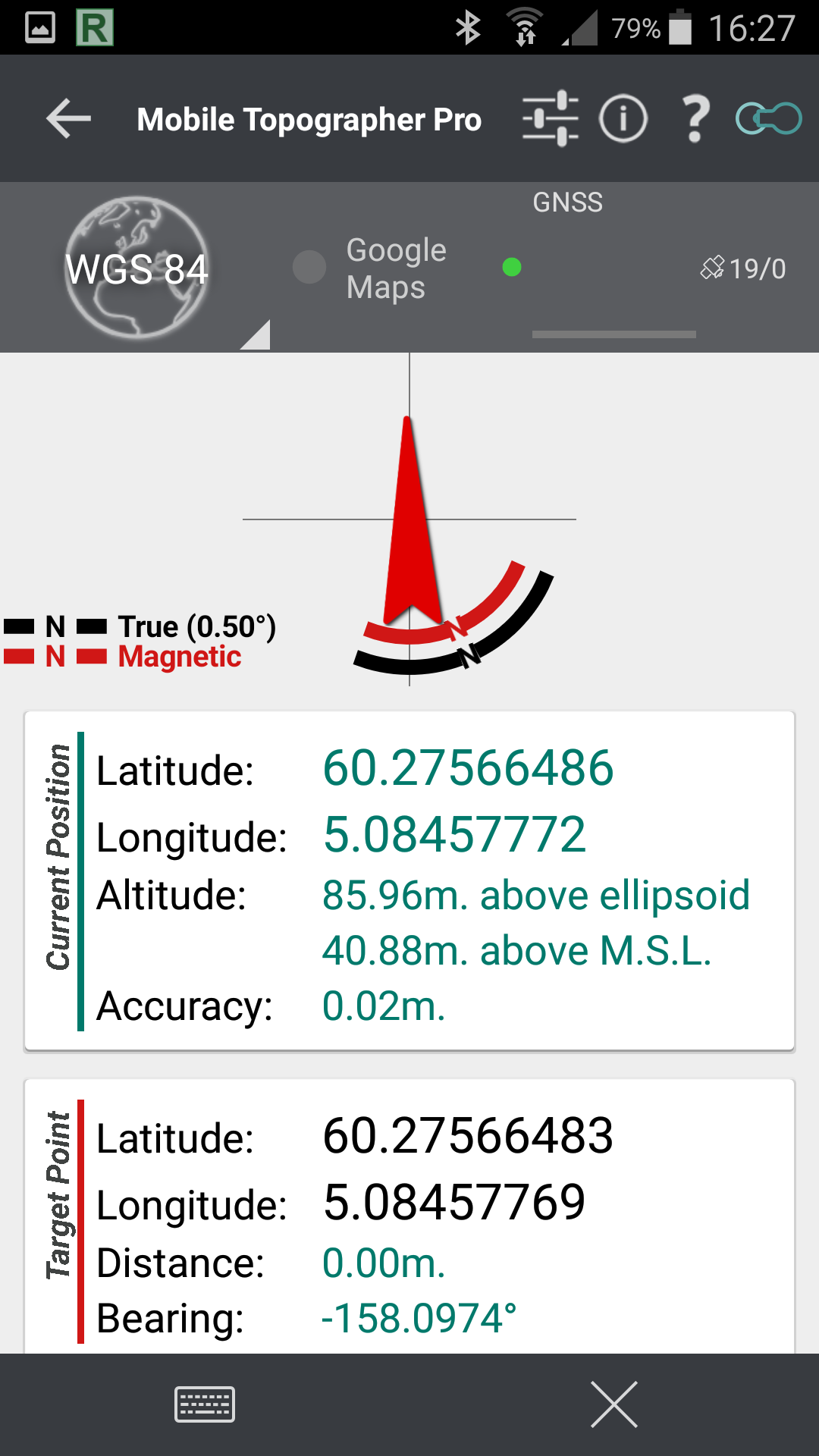
Goal would be to survey points were there is not possible to use GPS, under trees and areas with poor or no satellite coverage. Should be a familiar problem. I hope to get sub dm accuracy.
Second goal is to stake out points under the same conditions, but i will come back on that later.
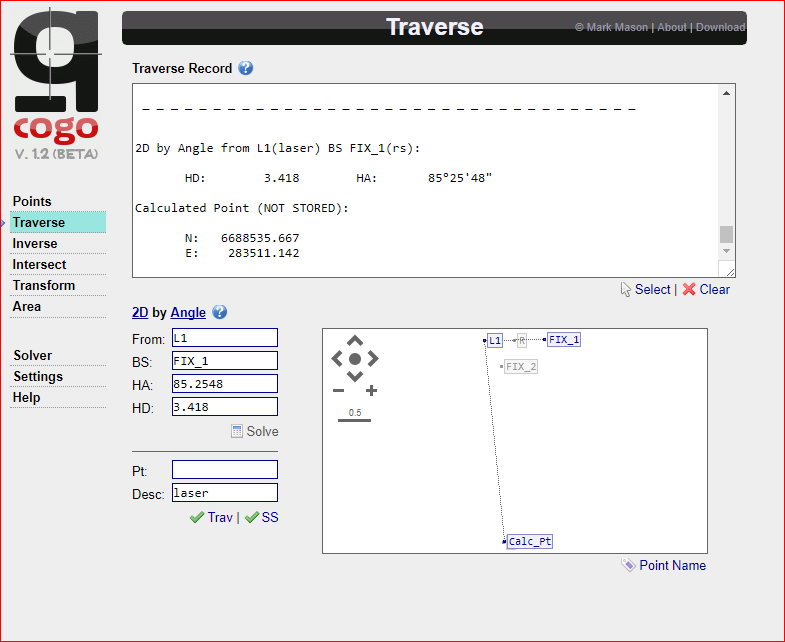
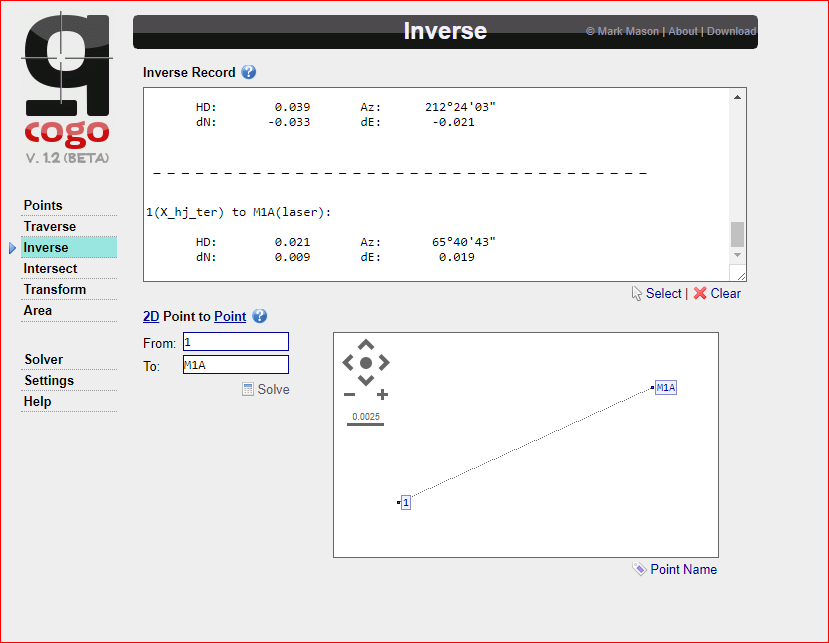
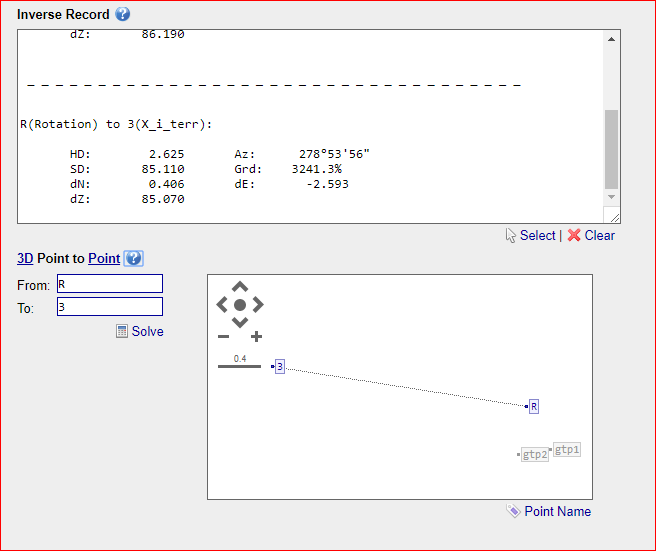
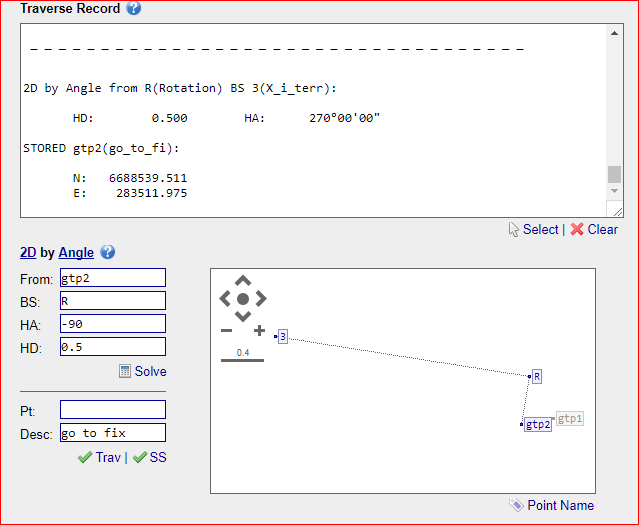
I would use Reach/RS to set refrence point and calculate backsight/traverse with online tool like Q-cogo. Its basically pure math and should not be a problem but different application has some deviation, like accurate position when calculating angles and elevation with laser like Leica Disto D510. All these error ad up and it is crucial to keep them at a minimum.
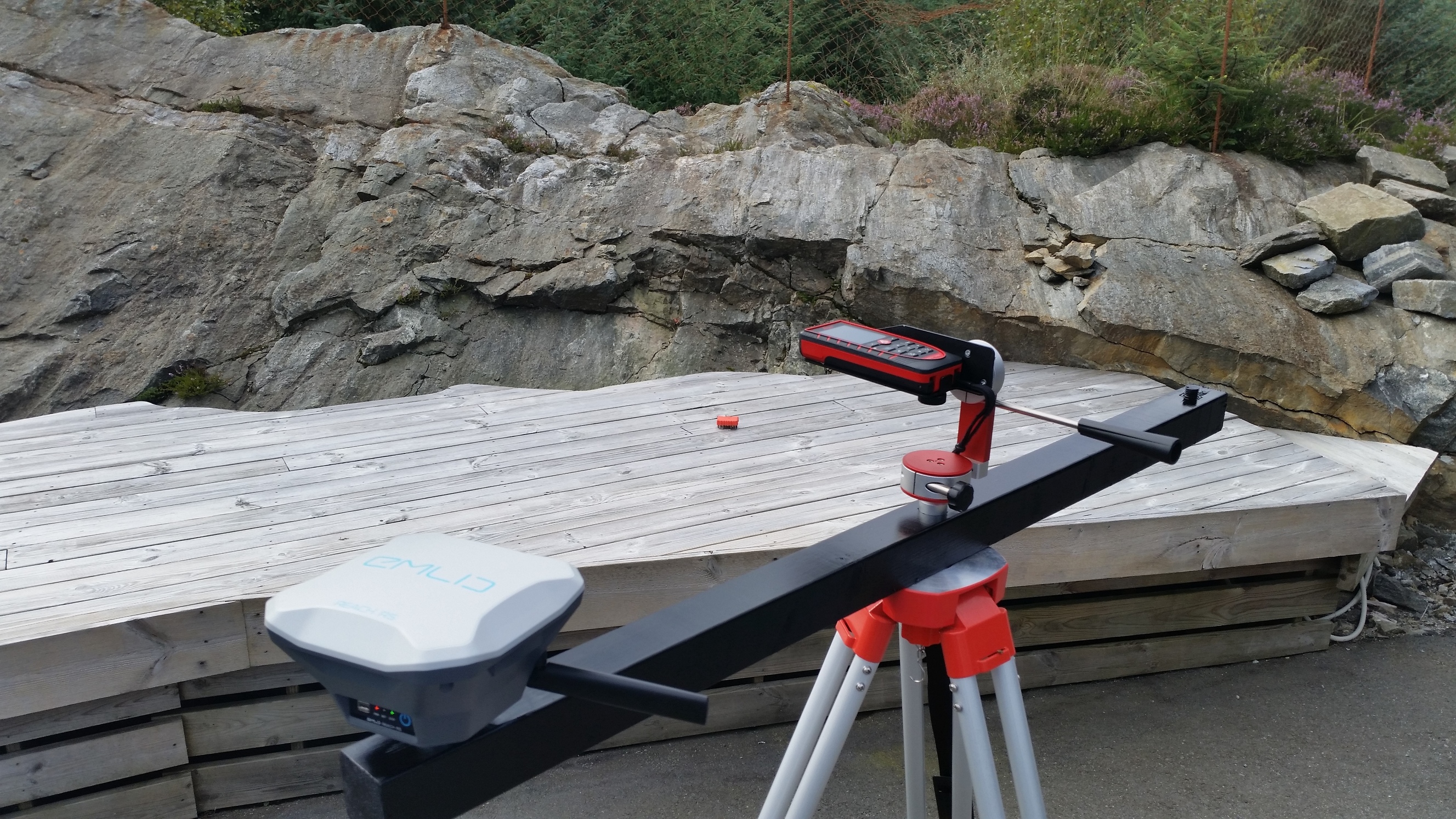
Following is pictures during assembly














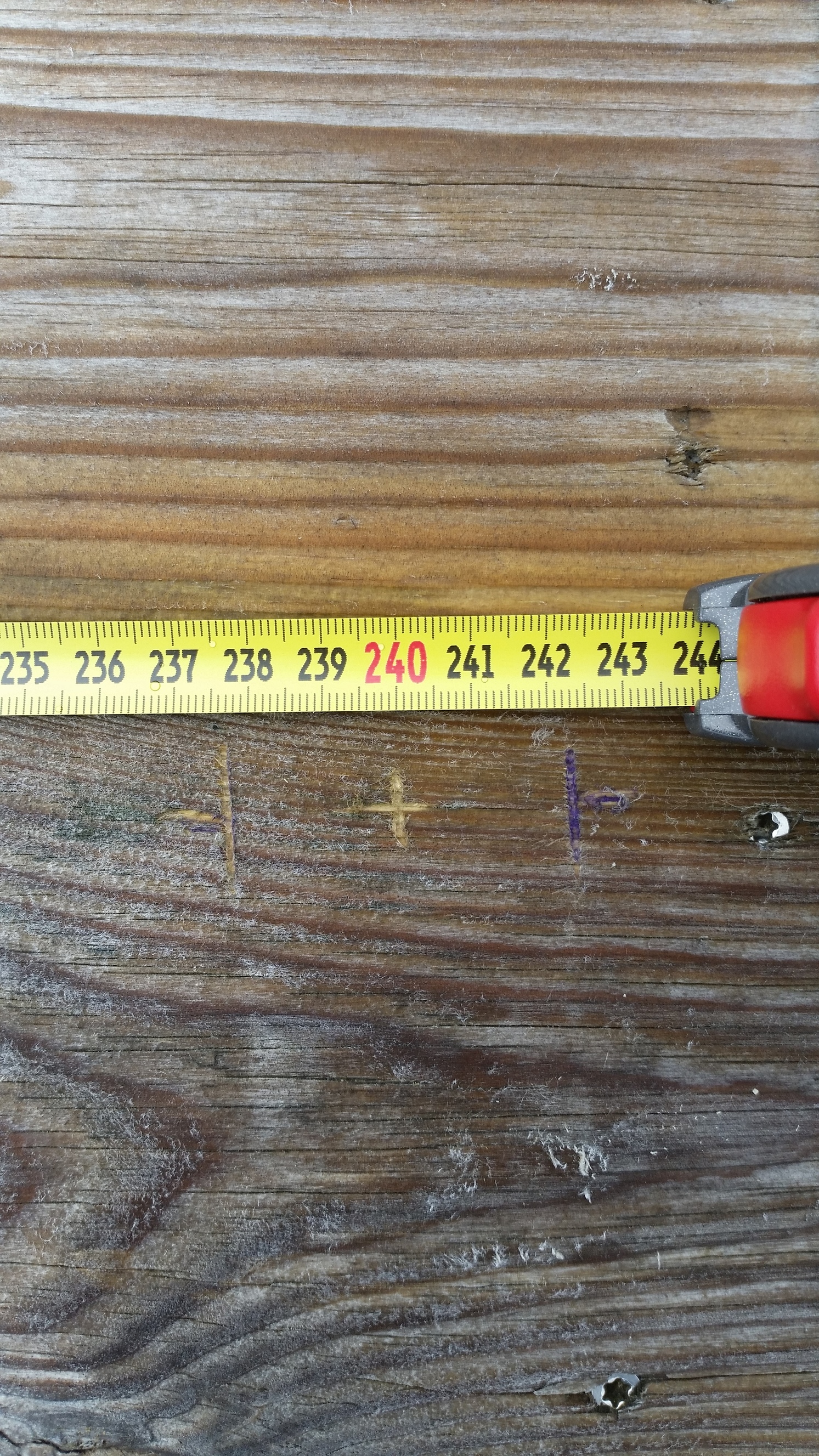
I made a rack of 2x2 wood. Is has 5/8 mounts in a straight line, 500mm apart.
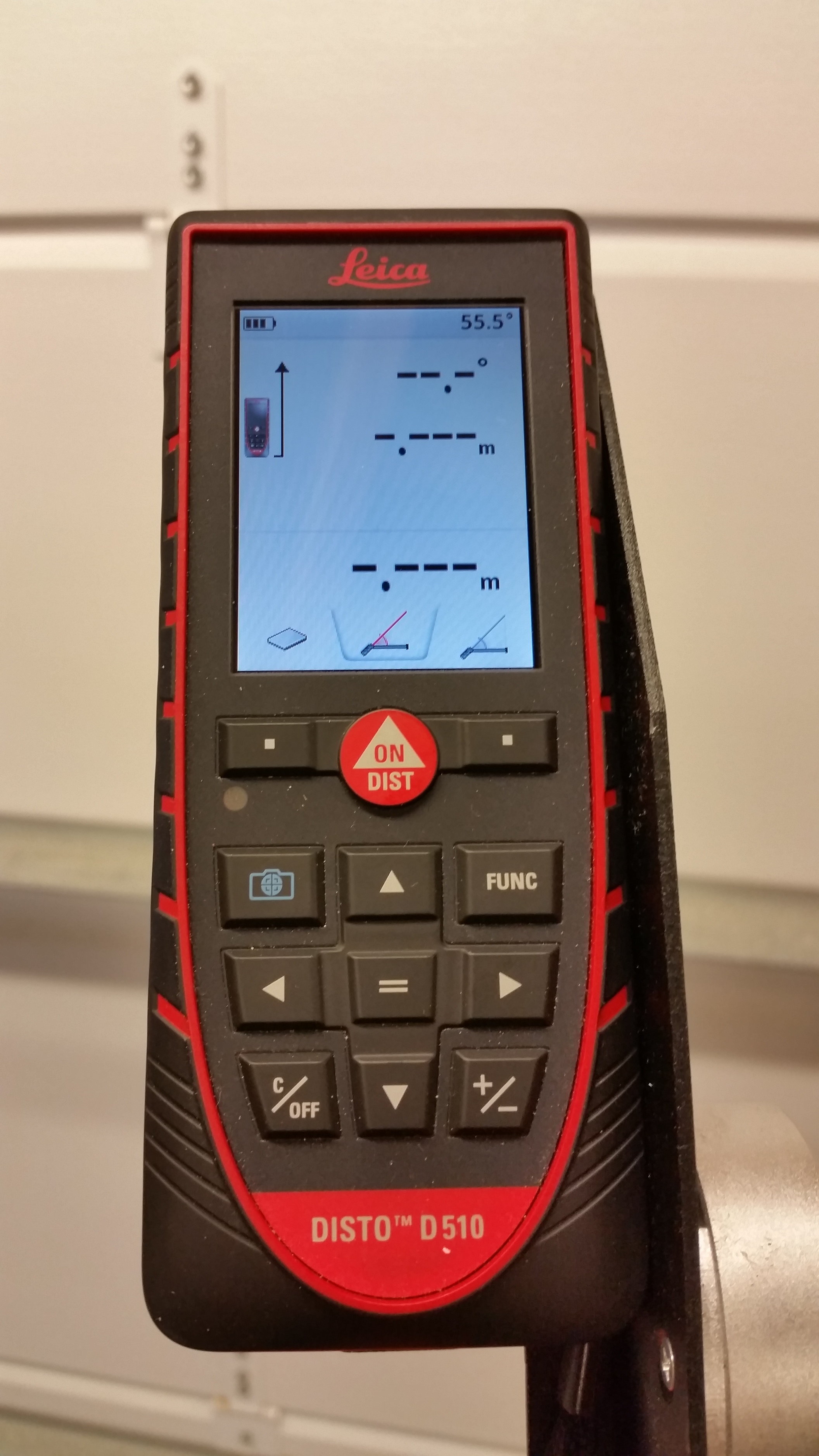
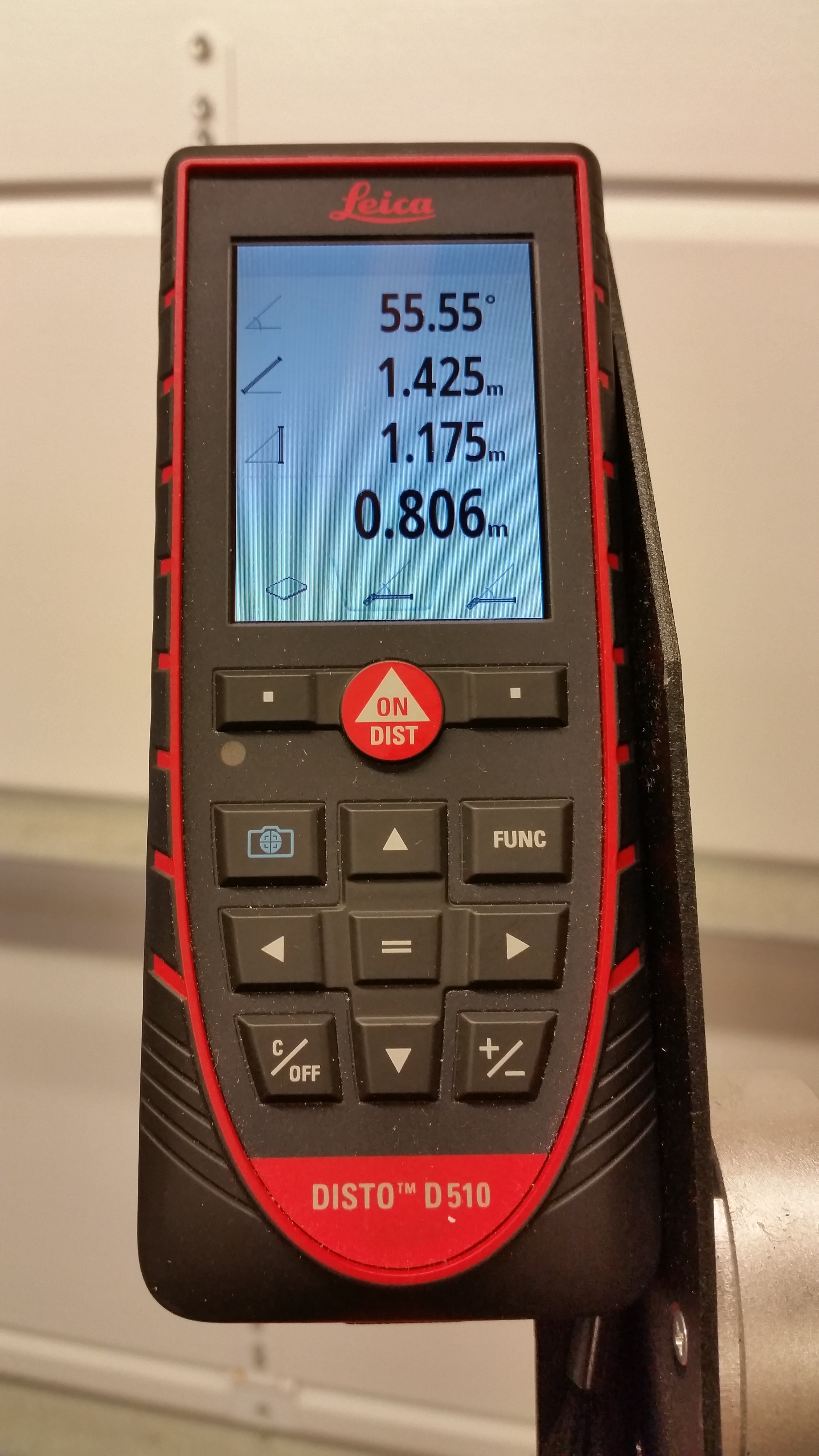
D510 is mounted with a bracket that spin around its vertical, horizontal axis and also elevate without shifting away from origin mount. This helps with accurat slope measure and is calculating the horizontal distance on the fly.
It has some other nice features i get show more of with the stake out section…
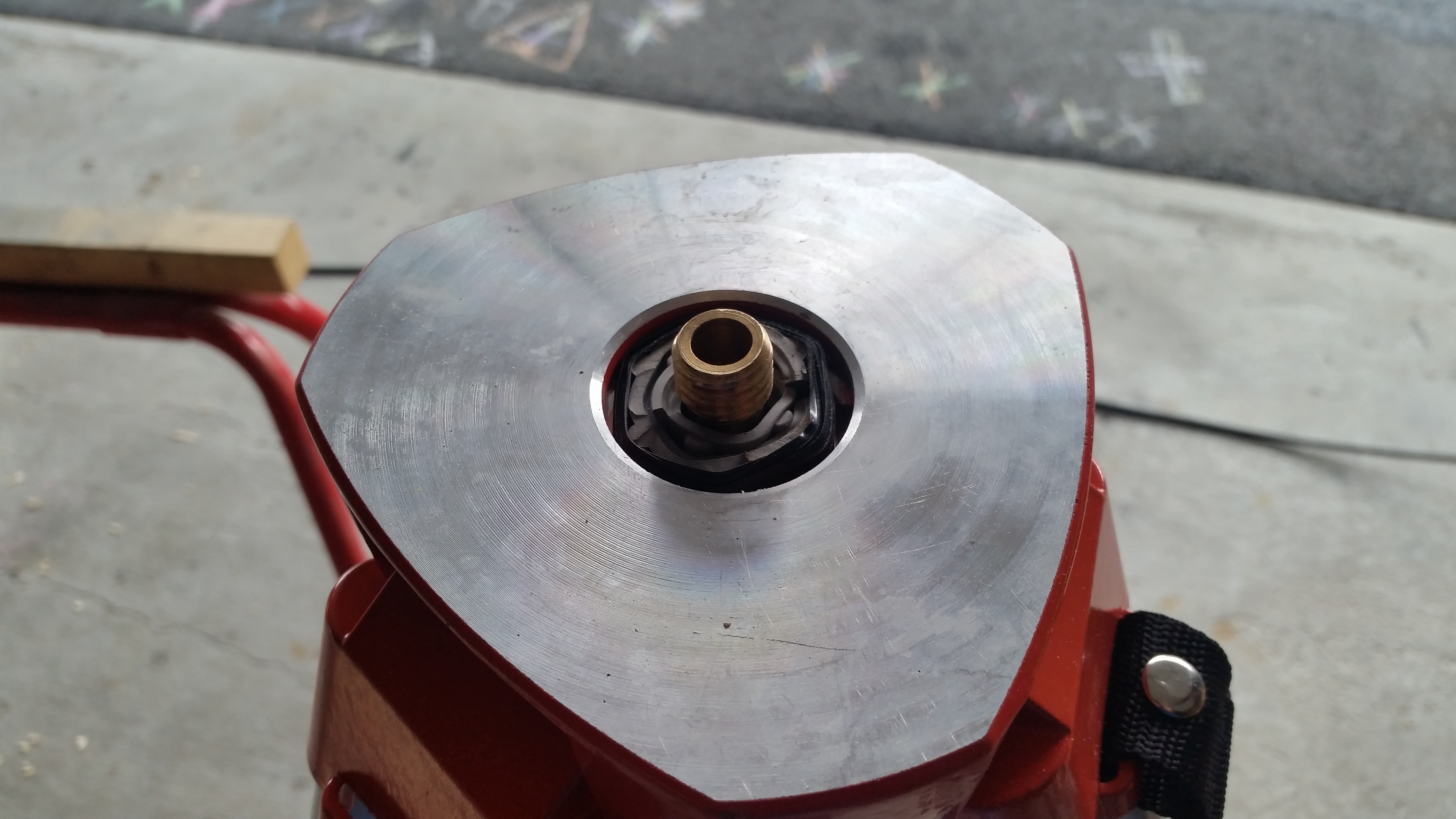
Next are some pictures from a place to calibrate and measure the angle Disto braket is mounted. Bracket is set in a random angle and tightn fix. When the rig is mounted on a tripod it will rotate on the tripod center mount and elevation is adjusted on the disto bracket. So it has 360 rotation and about 70degre elevation up and down.






Now, Q-cogo is an entire chapter so i am not going into that.
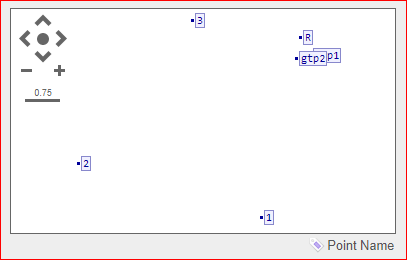
Here is a screenshot showing all points.
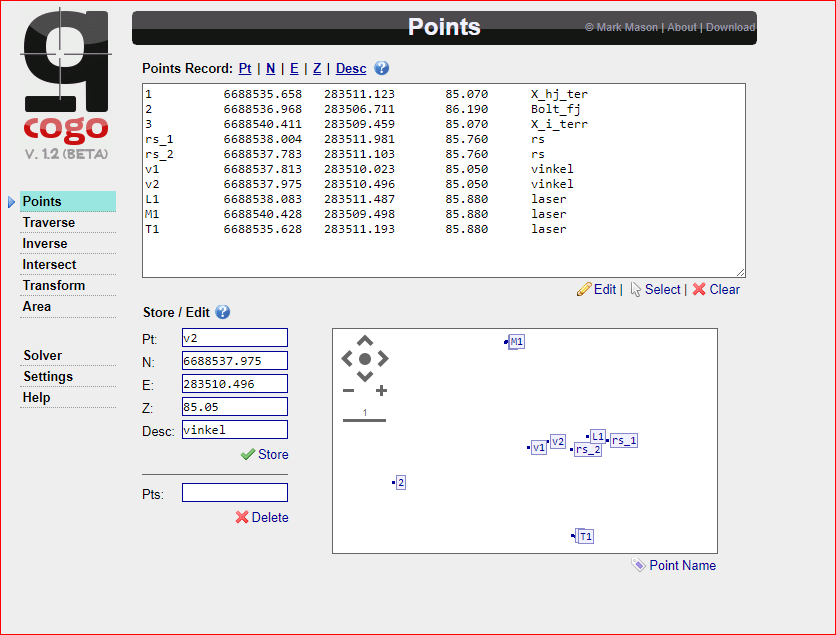
As you can see from the picture, calculated with disto alsmot line up with surveyd gps points, ( M1 and T1). They few cm off.
Here is all point zipped. All you need to do is copy content in file, hit edit button under points menu in Q-cogo and past into marked window and finish off with edit button again. Now should all points show up like above.
3d.zip (357 Bytes)
Short descriptions of pointlist
1-3 are surveyd points and should be accurate
RS 1-2 are position of RS during measure and is rotated around tripod axis.
L1 is calculated position with Q-cogo tool.
V1-2 are surveyd points during calibration of disto angle.
T1 is calculated position of nr 1 with Q-cogo
M1 is calculated position of nr 3 with Q-cogo
Next step is to move Disto to the end of rig, 1m apart instead of 500mm from reach to get better accuracy.
Right now, 500mm from reach it could generate large deviation. Just few mm of here would be cm further out.
To sum it up. Things look fairly accurate for something home made to be. Hope to narrow it down a bit more by increasing the distance between disto and Reach. I also need to calibrate the d510 it self. It has a buildt in function i need to carry out Hope this will better the elevation angle.
Well, thats it for now. Enjoy.
Be sure to check out Q-cogo. It has some nice features.

 And that with clear skyview
And that with clear skyview  That doesnt cut it in my world
That doesnt cut it in my world