



Good morning, everyone,
I have seen some strange behaviour on the Emlid system results doing some performance tests. Just a summary, it is measuring a distance of 2m as 1.3m consistently.
System description:
My system is composed of a Reach RS+ base and a Reach M+ rover.
Test setup:
There are two points on a straight line traced on the ground separated by 2 meters and at the same height (levelled ground). Rover is placed on point one and once it gets a fixed position the result (on xyz) is saved. After that the rover is moved to the other point and it is powered off and on again, the resulting coordinates are saved once it gets a fixed position.
When I have the two xyz positions, the distance between points and height is calculated.
For horizontal distance I use the following formula:
H.Distance = square root of( ((x2-x1)^2) + ((y2-y1)^2))
For vertical distance I use the following formula:
V.Distance = z2-z1
I took 4 measurements, and the results were:
1.291m, 1.293m, 1.302m and 1.287m for horizontal and 1.515, 1.512, 1.520 and 1535m.
I repeated the test the following day and the results were similar.
Base configuration:
The base is place about 20/25 meters form the rover so it (the rover) can be connected directly to the base Wi-Fi-hotspot.
At the start of the tests the base is connected to a Wi-Fi network on which it accesses corrections from an NTRIP server. Once it gets a fixed result, on base mode it calculated the average fix position for 10 minutes and I save this position using the “save coordinates to manual button”. Once this process is done the base is disconnected from the Wifi and its hotspot is turned on. This is the base settings:
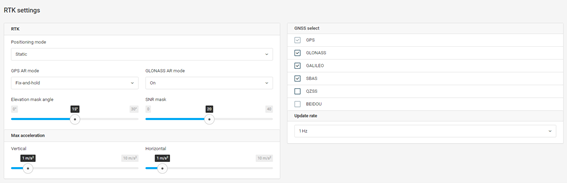
The base emits corrections using the TCP protocol configured as a server.
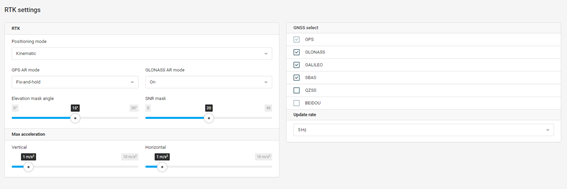
Rover configuration:
The rover is connected to the hotspot created by the base and obtains corrections from it using the TCP protocol, configured as a client.
Vairiations of the test:
Since I wasn’t getting the expected results I tried different configurations, such as:
Using a Wi-Fi router to connect base and rover.
Keep the base connected to the NTRIP server.
Changing the elevation mask to 25 and 35 degrees.
Setting up the rovers as static.
Turning GLONASS on and off.