



if anyone is ok , i will test the linux procedure . thank you for your time .
Each procedure is for each specific operating system. It does not matter GUI or Terminal. You only need to do one procedure; one flash.
My effort here was to get you to try something different.
hi , sorry to bother you again ,. for linux , which iso do you recommand ? redhat 、debian、ubuntu、suse ?
the pic is not as same as yours , wonder its because i am doing the test indoor . does that matters ?
thansk, problem solved, by using linux , it woks good .
by the way , i read an article about how to setup the parameters of latest version of reach in github, but i cant find it anywhere . do you guys know the link ??
thanks alot .
cause i don’t know how to setup in the new version .
no, not the firmware , the parameters of reachview.
since it doesnt like the old one , i even dont know how to set the rover model or base model .
and i cant open it in my cell phone .
Rechview beta 2.2.6 is through the new image 2.3
Edit: Ah, sorry didnt read the question properly, sorry about that.
Not sure where that is
my reachview version 2.0.3 shall i update it ?
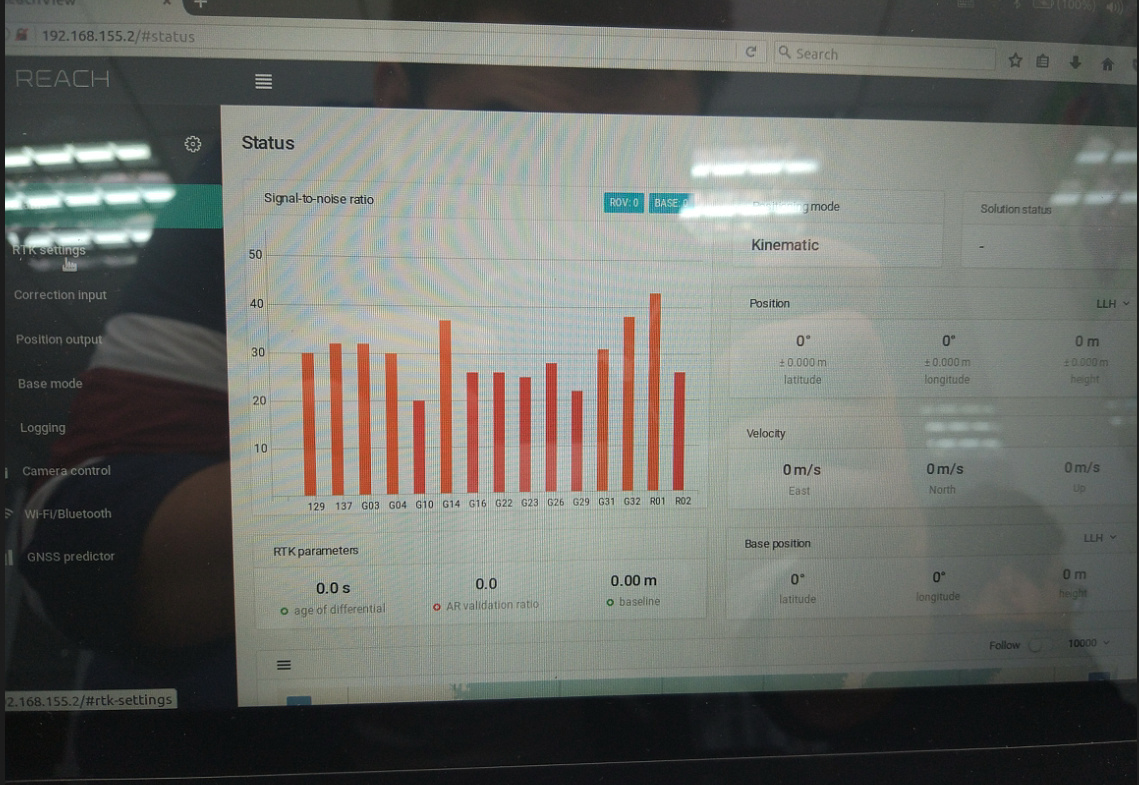
as you can see in the pic , it doesnt have clear mark that shows (like the old one ), if i click the buttion , it switch to base model , if i click that ,it switch to rover model
Yes. Previous beta versions had bugs like you mention
i have updated to the latest version 2.2.6-ro
but i still dont know which one is the base model , which one is rover model .
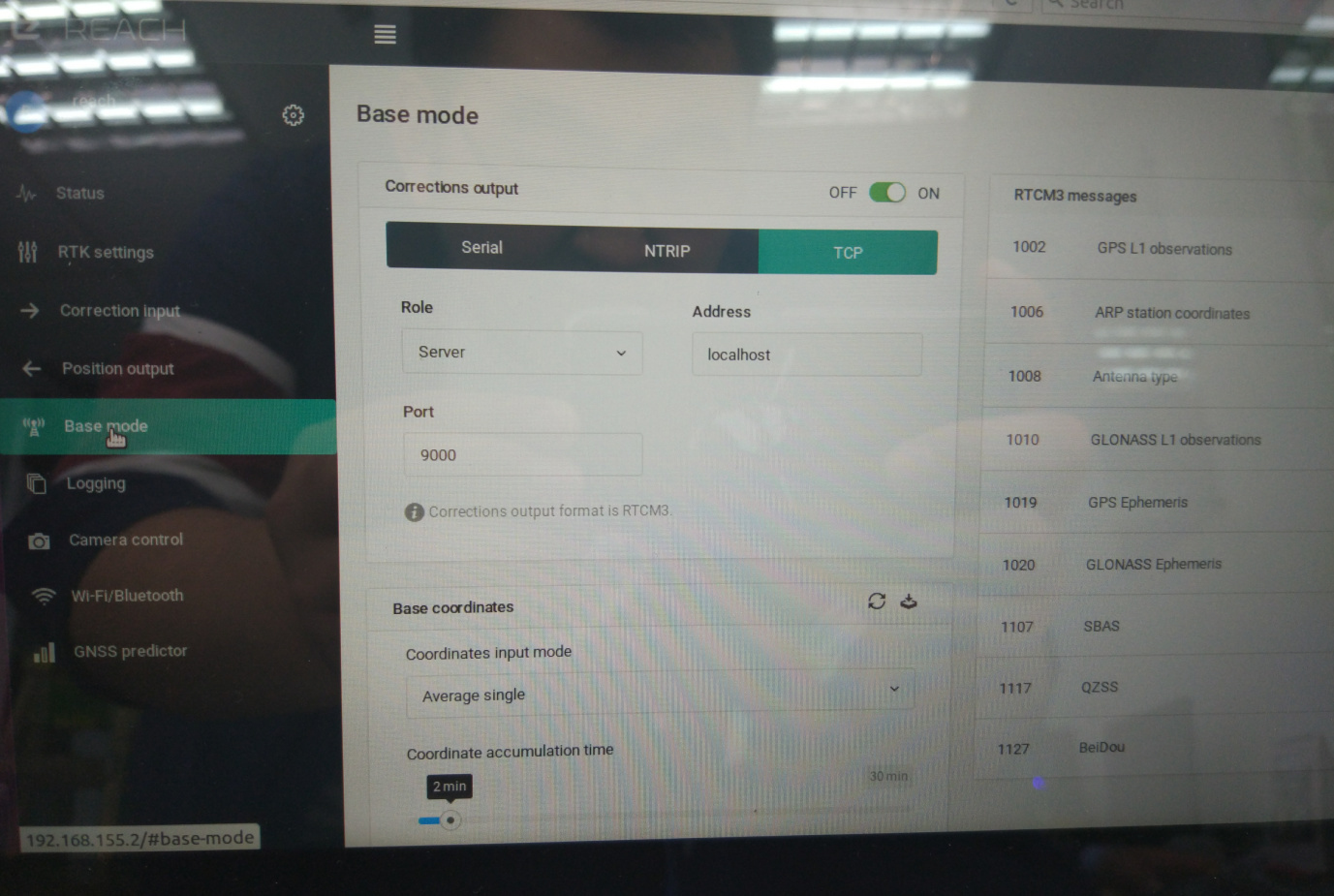
as the pic shows, does the role of Server means base ? the role of client means rover ??
You can use whatevere unit you like as rover or base.
I like to name one as base and one as rover just to identify which one i am working on, you do this under setting (top left corner, round wheel thingy). Then you have a name for your unit that shows up at the top left corner.
To set base, you`r right. Enable base and select output that fits your gear. On the rover, you activate correction input with the corresponding values to base setting.
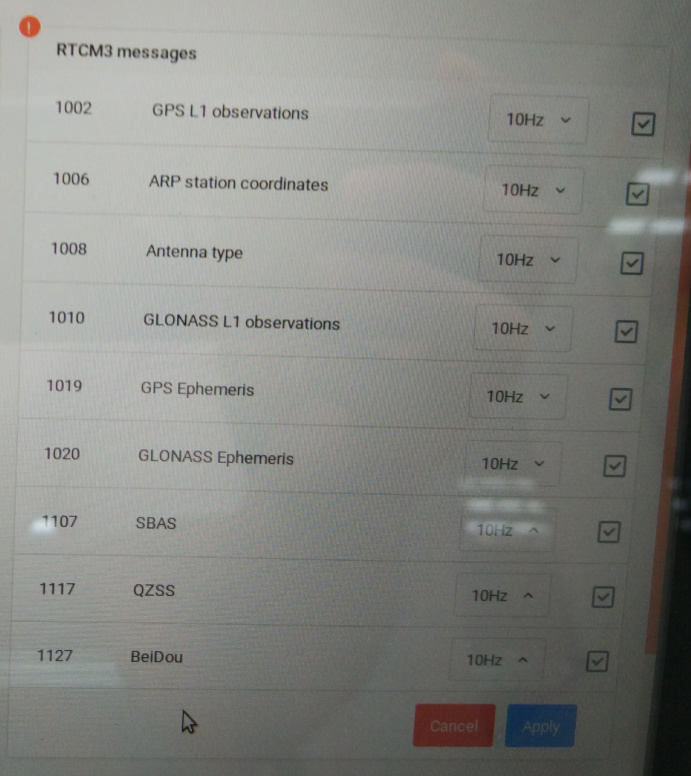
how about the gps types , can i select them all and make the frequency 10HZ? or i just leave it as defult ?
Start out with default
but i want to make the frequency as 10HZ , can this possible ?
Yes, but not all satellites type is supported with 10Hz.
Start of with GPS only, and ad more system to you see what is compatible with 10Hz
Start with this in RTK settings