Hello Emlid users. I have two RS2 units in a forested, hilly plot in New Mexico, USA. My base is on a higher location with the clearest sky view I could find, and its location was post processed to the nearest CORS station, and it is now known.
I then use my Rover to record (in static mode) all tree locations, species, and tree id’s throughout my 56m radius plot. I export the data from the survey mode as a csv and use the posprocessor developed by an Emlid user to average my points from the RTKpost generated pos with that csv.
I have not been able to generate many fixed trees in the field, and with over 1800 trees in my plot, my record time per tree is around 3 minutes. I do get about 95% float values in the field. I am happy with sub meter precision, but ideally would like to ppk down to a better precision, especially since we will re-visit the trees every year to look at their health.
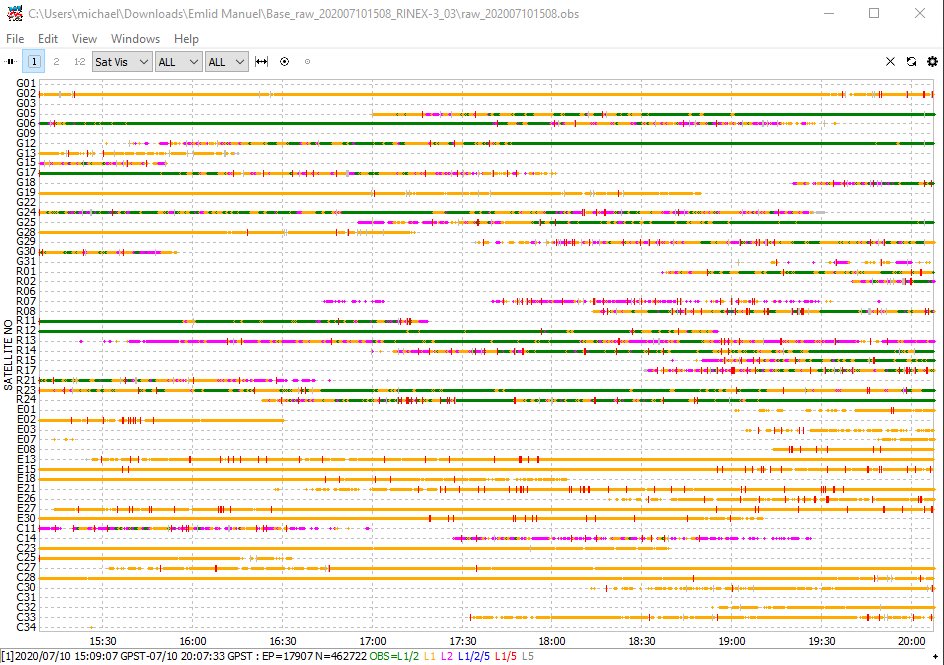
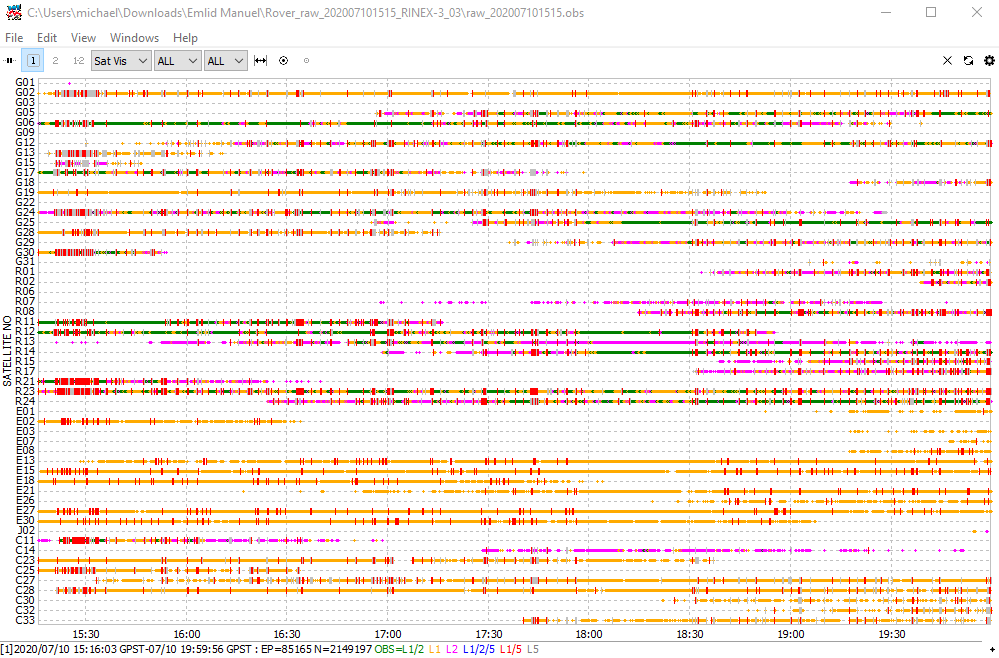
I will attach an example of on of my days in the field (over 50 trees recorded) and was hoping someone might advice on the best settings in RTKlib to use for my analyses. I’m really looking forward to your advice and discussion with this research. I have been playing around with many different settings and my points seem to be changing with every adjustment made.
My base coordinates: 35.754801221, -105.827789215, alt: 2794.5116
Rover height: 1.94
Two things I wanted to clarify. Your elevation value is meters? Or feet? Also, the rover height is just under the traditional 2m. Can you make sure the rod height and any spacer/adapters that may be in play?
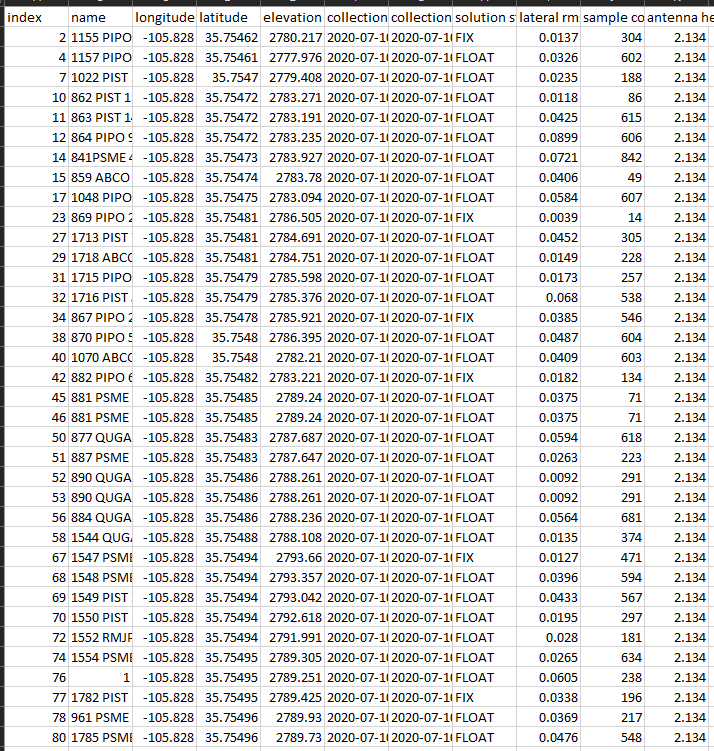
I just did a quick filter and sort and it looks like just a little less than half the points are in a fixed condition or a float that are centimeter level.
Thank you so much for your input Michael. I think my base is at 2.134 and my rover height varies from the person wearing the rod and rover on their back.
I am having weird results with my rtkpost inputs. When I designate the obs as static, I get a very tight cluster of my trees (when the 60 or so trees for that day were definitely spread out), and when I use Kinematic, my trees are spread out like they should be.
Is there any way you can show me what rtkpost options you would select?
Mannie
You would need to chose Kinematic for processing of your dataset in RTKPost. You could choose to process each obs as Static, however, that is quite a bit of work, and for this challenging data-set, you might see even lower fix-counts than by processing it all as Kinematic.