



Perfect! Don’t forget to protect the external baro from light and airflows with some foam.
I do not remember the exact name, but look for baro alt in the logs. 
1 Like
@igor.vereninov @mikhail.avkhimenia , quick update, the external baro is working very well on my hexa! haven’t tested on the octa yet.
The flight characteristics are excellent with 3.4 or whatever the newest ArduCopter is.
There is one oddity I cannot sort out. My logs are gibberish. None of the parameters are logging correctly. I don’t have the slightest idea how to go about trouble shooting this. Any ideas?
Here’s a link to the log: https://drive.google.com/file/d/0B7HD5XkwsmeJNnJEOGk0STh4OUE/view?usp=sharing
regards,
J
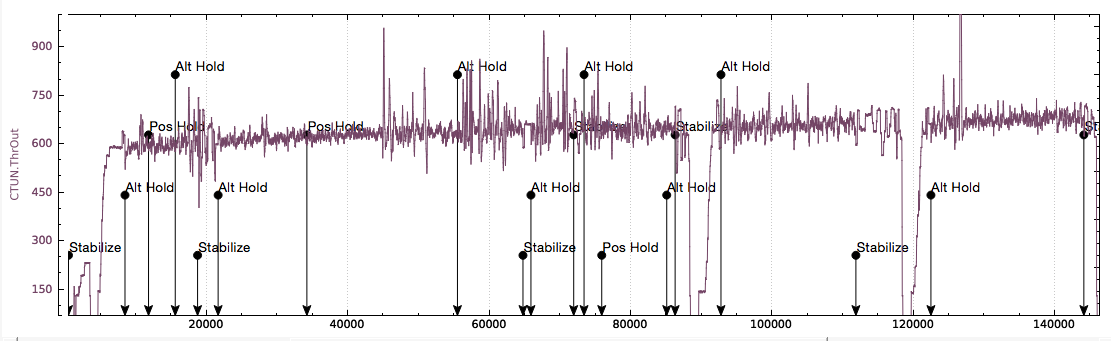
@ivereninov , that’s odd, if you don’t mind, can you please look at CTUN - THROUT & IMU - ACCEL X, Y, Z , did they graph correctly? These were the parameters that were messed up when I loaded the log.

Those are definitely correct. I wonder why it is showing incorrectly on my side. Thanks
Have you tried updating your GCS?
1 Like
No, I will mess with my gcs  thanks you
thanks you
It was the ground station. update fixed the issue. thanks for the clarification
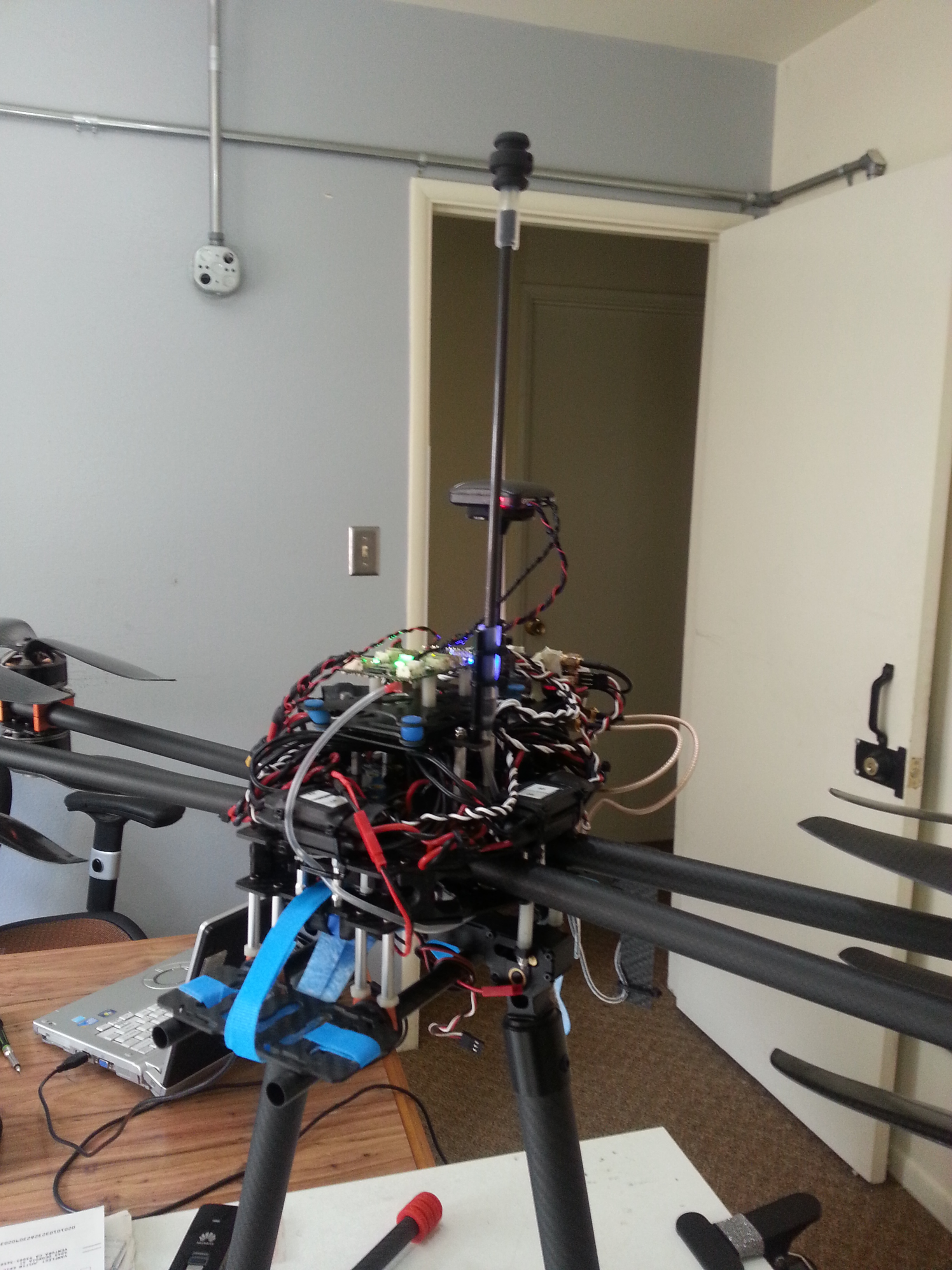
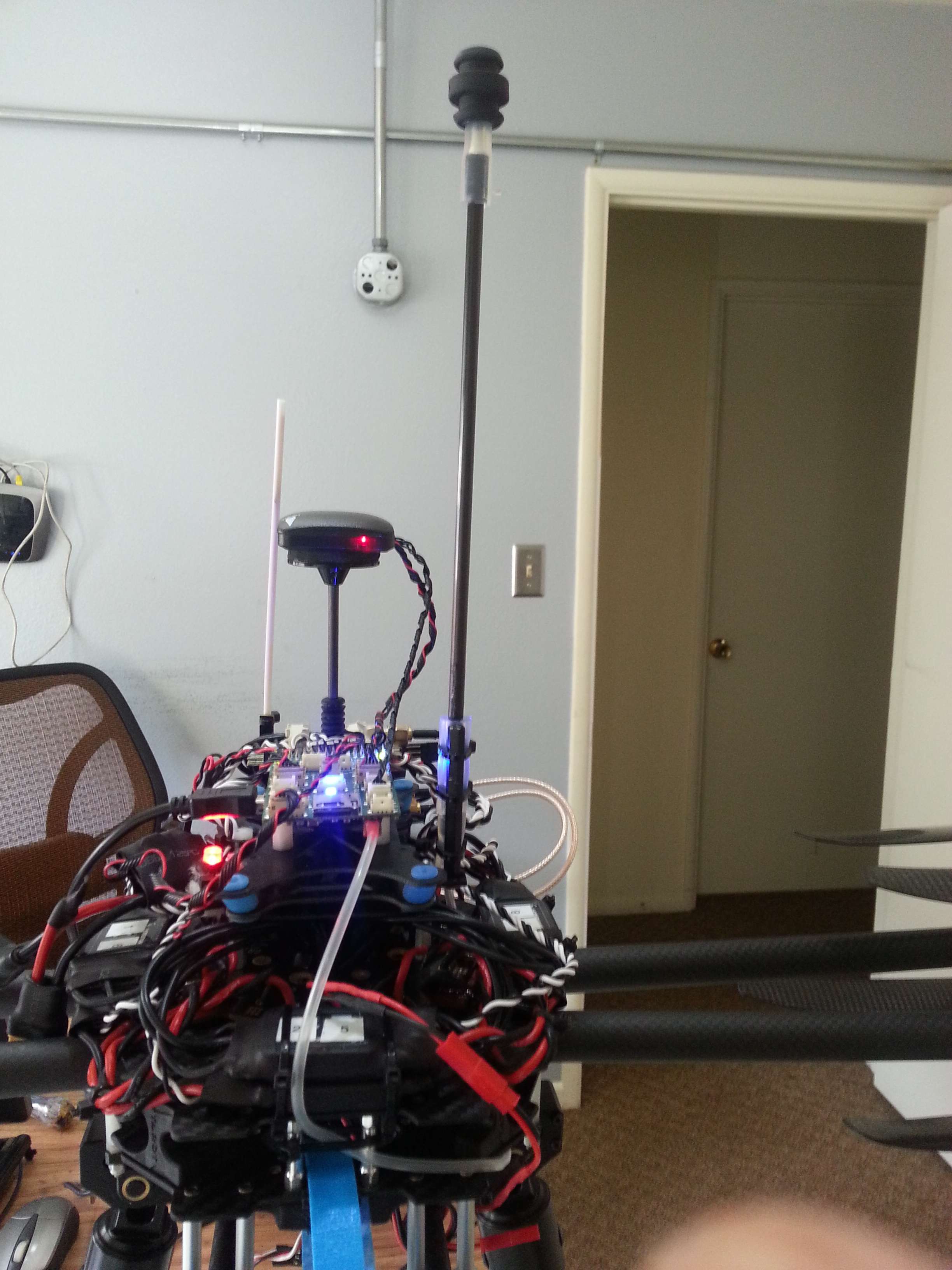
Update on the baro tube option for the low air pressure issue on large X8 / Octa quad:
This is of course on a pixhawk but this would apply to navio+ as well.
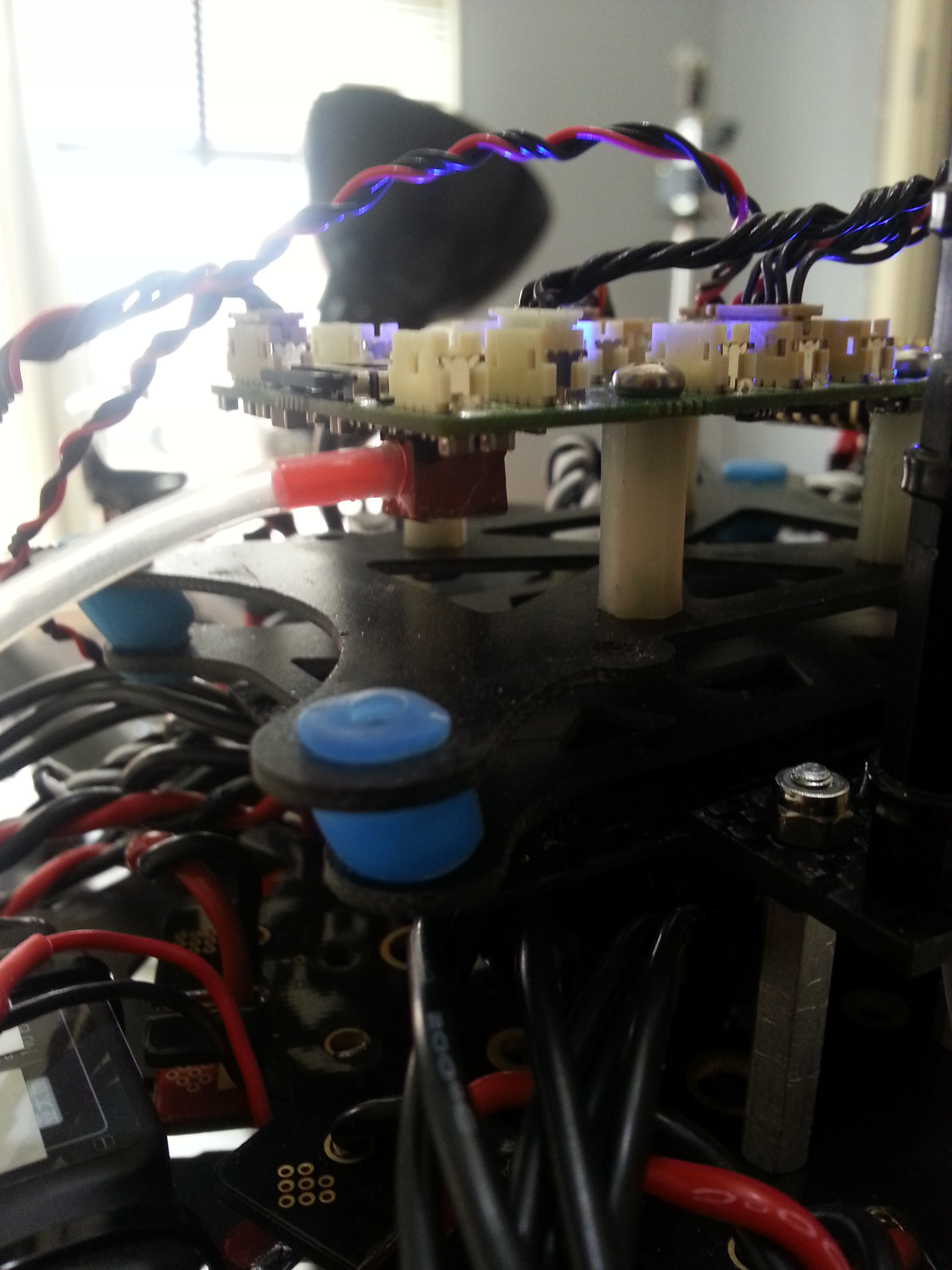
This baro tube seen below significantly improved alt-hold performance. I still see some loss in altitude at high speed forward maneuvers, but this is really not a realistic scenario for this build as its meant for ap & mapping. At moderate speeds it hold altitude very well. This is with stock pids.
Without the tube even at low speeds I had significant loss in altitude and it set in right away.
Getting the housing around the baro was tricky as you have less then a 1mm clearance between the baro and the closest components on the board. I milled down a section of a deans power connector to make housing and connected a small plastic tube. This was secured to the board with a silicone rubber adhesive. The rest of the set up consists of a carbon fiber tube, some silicone tubing, and a landing gear dampener with a hole drilled horizontally though the middle.

I will try a couple other configurations with the tube to see if I get better/worse performance
1 Like