



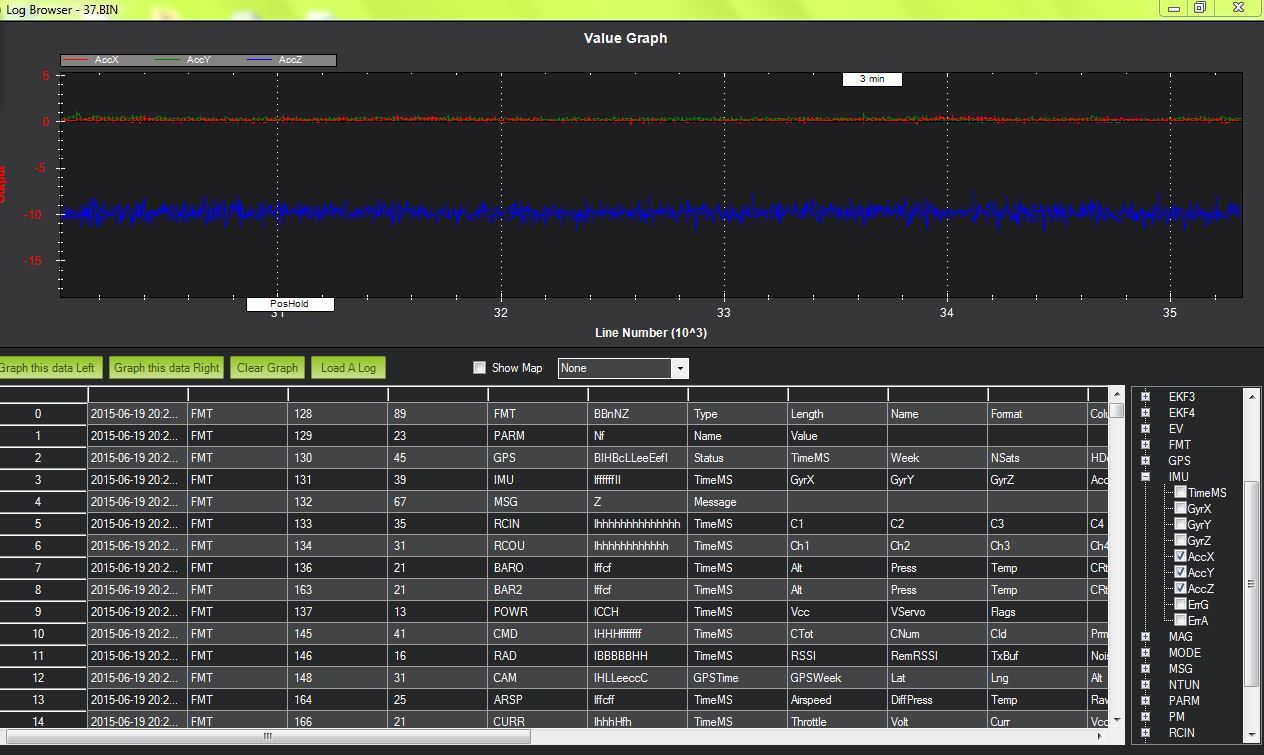
Here’s a sample of my IMU readout. This is with balance of motors and props of course, but it was still within limits even with unbalanced props/motors.
It consists of:
A layer of this on the bottom:
One of these with the larger side facing up:
Then I made two little boards from cf that matched the mount pattern on the raspi and vibe mount.
It works quite well.
I was using nylon props and the vibes were quite low without balance. Then I switched to the unforgiving cf props and was having some spikes below/above limits. A thorough balance cleaned things up nicely as you can see.
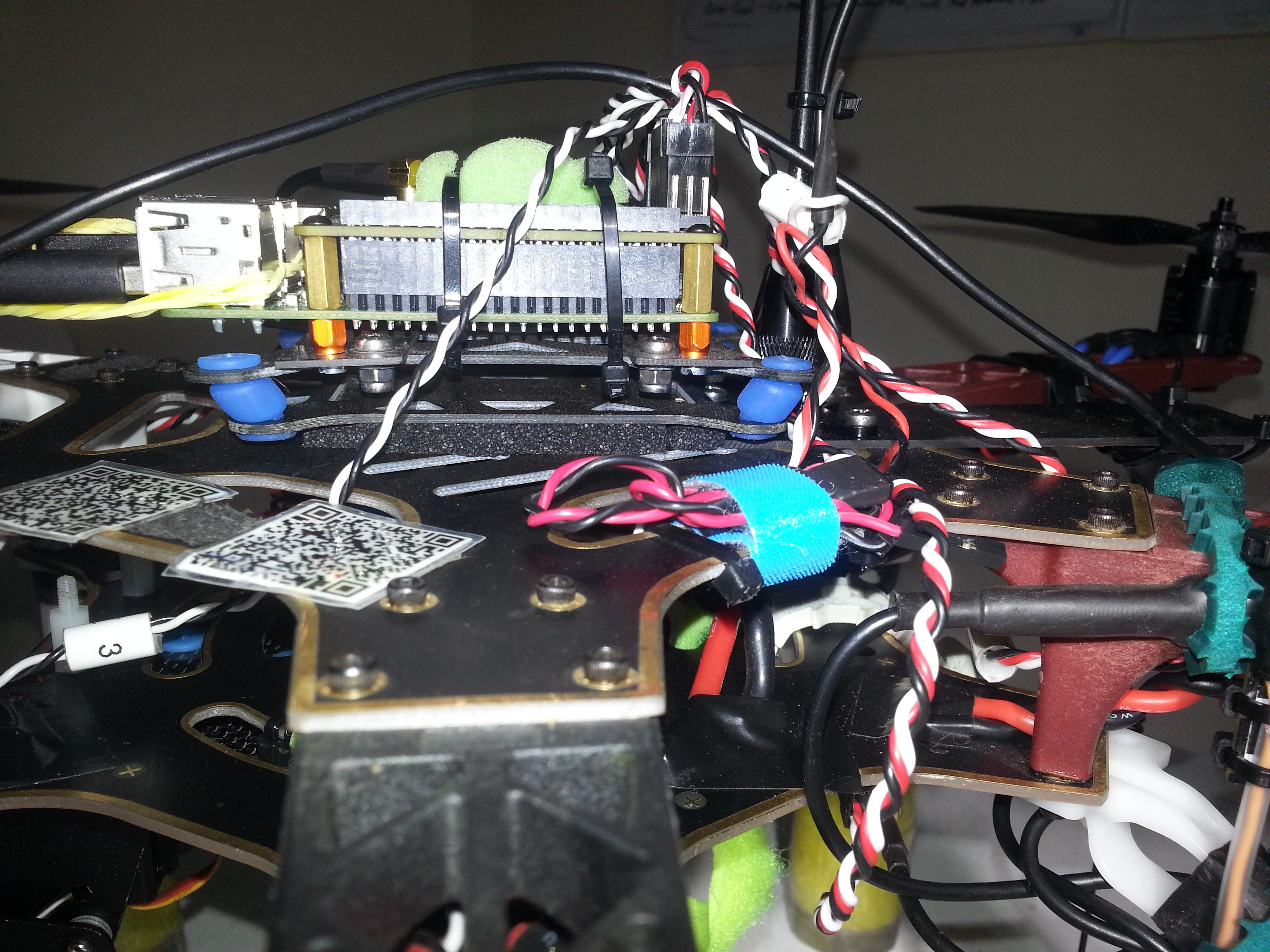
Rubber bands are used to dampen the usb ports. They keep the plugs snug in place.
I used zip ties to to keep the foam over the baro in place. Other methods produced vibes. But the zip ties there was no effect…
Soon I will take the usb/ethernet/hdmi/audio ports off, then I will add one locking usb port and solder my RT5370 directly to the pi.