Cool design Ole! Have been following your builds for a while now. Really have to say that you are a big inspiration with your builds. Just the idea of cutting the carbon with a scissor, easy and smart(no dust…). Hadn’t seen that one before : )
All your builds seems very compact(bottom to top plates ~2cm). It looks to me that you ain’t using any dampening boards for the Navio board, is that correct? I haven’t seen (on any build) the use of a PDB either? This quad is using the 4 in one ESC-concept and i guess you are matching the correct bat to that. Or what is your magic, how do you supply the power to the ESC’s? : )
Hi Matias!, I’m still waiting for some parts in the mail, but should be ready for first test flight soon.
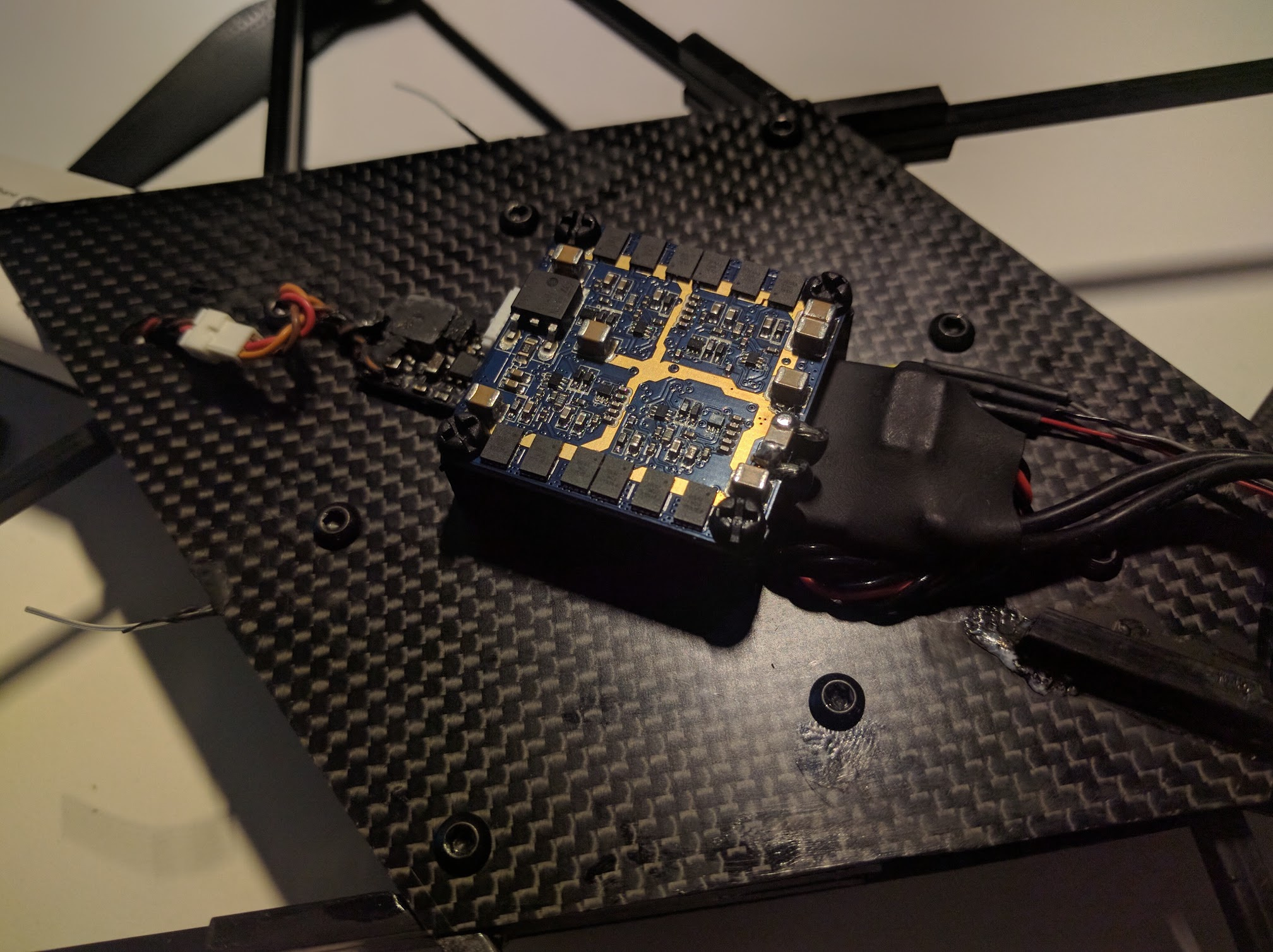
The 4 in one esc is connected to the battery, via the current sensor in the APM power module. The small regulator to the left is for the modem. I use the regulator in the esc to power the NAVIO servo rail. (for the camera tilt servo). The 4 battery cells, will fit around the esc.
Your build is very impressive. I’m currently in the process of doing something very similar, but I want to make it as small as possible thus using 4" rotors. I’m basing my design on yours and I have a few questions:
Did you already finish your build? How did it work out?
Do you have a 3d model of your design you would be willing to share?
Is it necessary to have each motor equidistant to each other? Is mirror-symmetry not enough?
Is it necessary to have each motor/rotor on the same plane? It seems that if you shift four motor arms down (lets say on the upper right and lower left motoer) you would get a more stable frame since now all eight long arms are unbroken?
Thank you for your help and keep on building!
jak4
1 - Not yet… been busy with other things and still waiting for some new parts in the mail. I’ve flown it for about 30 sec…
2- just 2d drawings, I’ll post the PDF file if you want, I use and old CAD program called Vellum. There really is no magic to designing quadcopters, pay attention to matching the motors, propellors and battery… the rest is not critical
3- No, due to the flight controller almost any configuration will work quite well. However, I think it is better to have the props quite close to reduce propwash and wobbling on decent, and symmetric designs are easier to tune, and behave better at the extremes (when the motors close to max power)
4- No I do not thinks so, at least not for hover or slow flying, for fast foreward flight I guess there will be some differences as the airflow over the props will differ when the height vary. You are right in that you could do without the slots in the arms if you allowed for different heights of the motors, but with the three layers of beams it does not make much of a difference.
Thank you for your answer and please keep us posted on how your 4th build works out.
My father in law helped design a frame, because, well I think he also has the “not invented here” syndrome. It looks quite nice but I have my doubts about the stability compared to your design. It is lighter but also much smaller, I think 150 mm compared to your 208 mm motor distance.
If it’s done I’ll post it here to get some expert opinions.
Finally got the last pieces in the mail and put the quad together. The new GPS antenna is working very well and I get a good GPS lock while the camera is streaming over the modem:
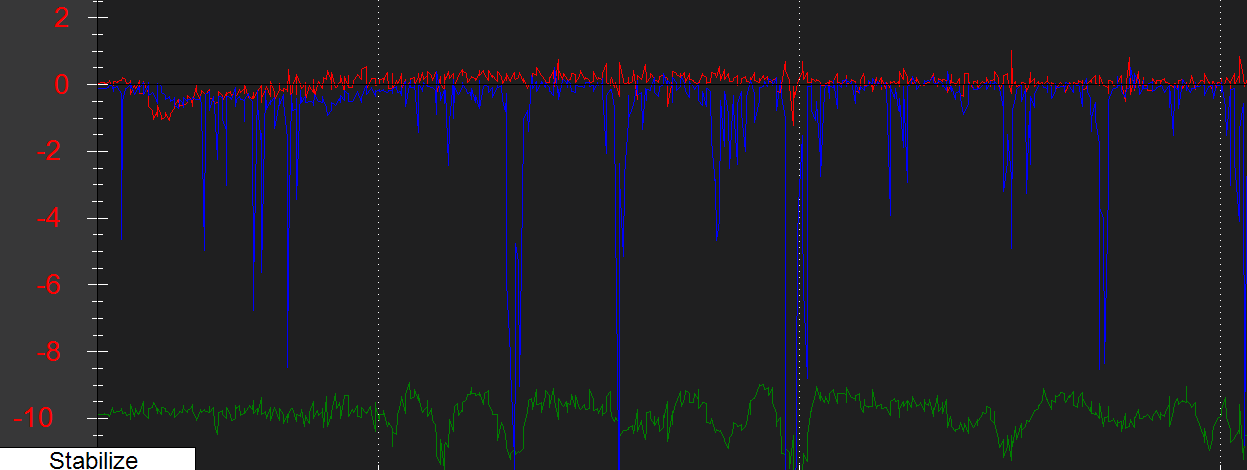
I’ve just had the first test flights and I am trying to get the PID settings right, but I suspect there could be some problems with vibrations or the accelerometers. Here is a graph of the IMU log:
The y and z signal seems good, and the amount of vibrations is quite low, but the x signal looks strange to me. First of all the amplitude it is very large and all in one direction. Is this normal?..
Further, if there were serious problems with vibrations, should it not be present in the other axis’s too? Could it be a hardware problem with the sensors?
The props are well balanced, and by just holding the quad it does not seem to vibrate much at all.
You could strap a gopro on their without dampers and watch the vibrations that way. If it is not noticable and the flight time is as expected I wouldn’t worry about it.
Did you ever crash the Navio you are using with this copter? This looks really strange and I doubt this is the result of a physical vibration. Did you try to setup the RPi/Navio from scratch?
Yes, it should be present in the other axis, too. Only a hard push in the direction of that axis might produce a result like shown in that picture.
Swapping the Navios sounds like a good idea. If both show the same behaviour, I would reinstall Ardupilot and Raspbian perhaps. I had to start from scratch two times up untill now with my rover, because APM suddenly gave full left steering output in any mode except manual. I suspect something got corrupted on the SD-card. Strange thing, that it produced the same error twice. But I could even load the old settings and everything was still fine.
Hi Ole, great project and posts so far. Any update with the latest build? I’m curious to see if your 4 NCR18650GA circular battery configuration is working out well. With 10A max discharge, I wonder how the control would feel (snappy vs. slower drift)? I’m actually basing my build on your latest build as a prototype due to its compact size and light weight, so every little bit counts Thanks in advanced, Ole.




 I’m sure it work fine, but the thicker the sheet, the more coarse the edge will be. But nothing worse than a little sanding will take care of.
I’m sure it work fine, but the thicker the sheet, the more coarse the edge will be. But nothing worse than a little sanding will take care of.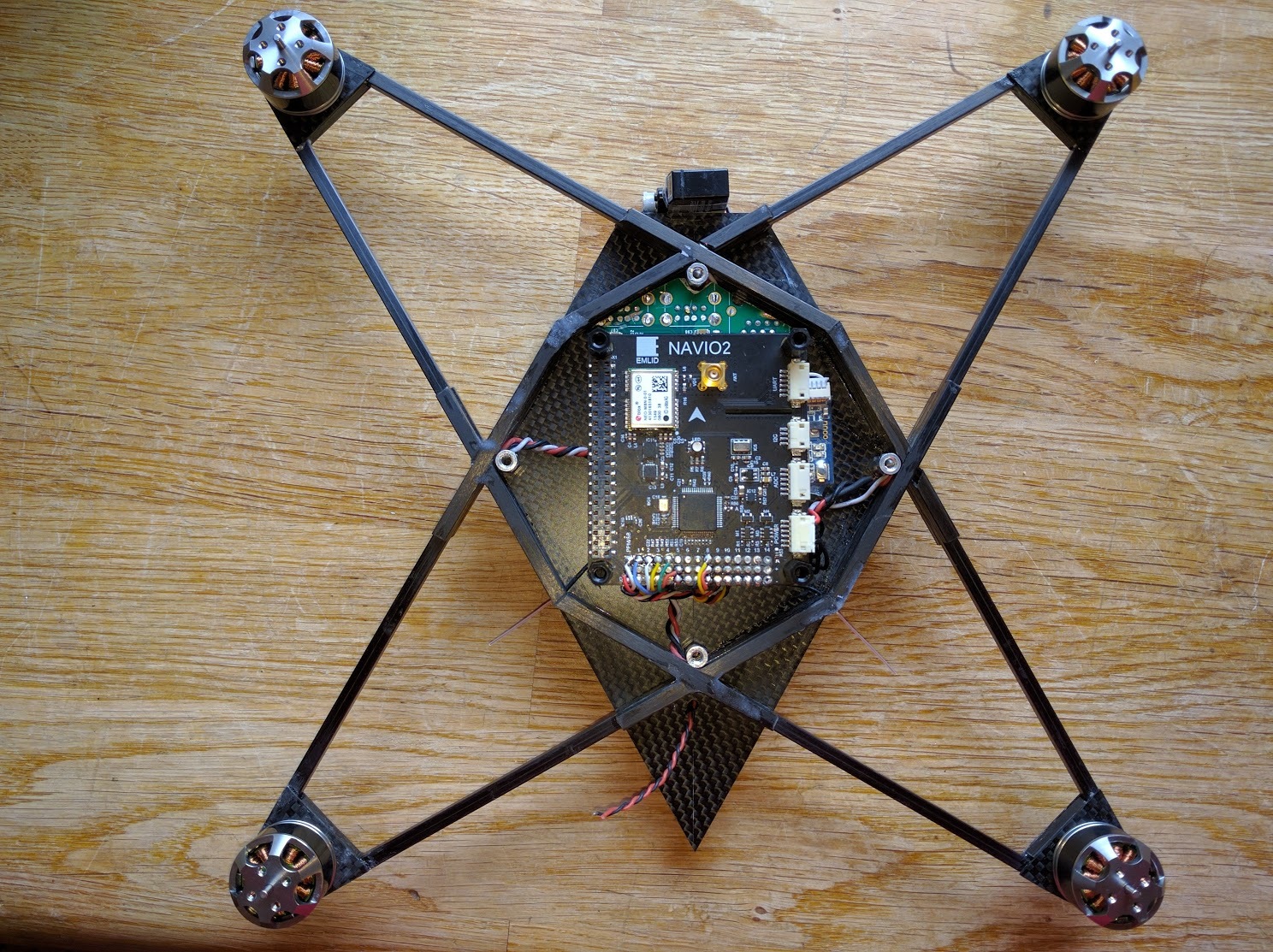
 Kanskje jeg flyr over en dag !
Kanskje jeg flyr over en dag !