is it possible this happens do to magnetic interference ? I’ve put my FPV transmitter on top of the navio+ case and if so, is it possible to fix it with the compass calibration for magnetic interference ?
If it would help, i can provide a log file and or a photo of my setup
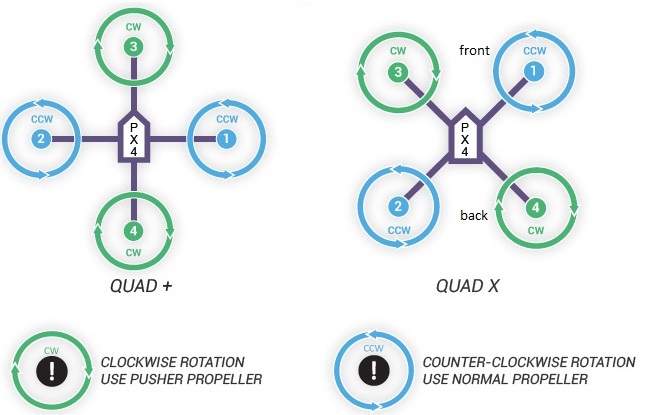
ok, i guess i’ve earned a new batch for stupidness ^^ it really looks like i’ve missed again something with cw/ccw, i’ve removed all motors, rotated them clockwise to the next position, checked rotation direction and switched direction if necessary within BelHeli Suite, so now all motors should rotate definitely in the right direction (probably i should use another term, since i was previously also absolutely sure ) .
I will give it another try tomorrow.
Should i do another ESC calibration after switching Motors ?




 after i increasing throttle to approximately 50%
after i increasing throttle to approximately 50%