



Guys, thanks a lot for your patience. We’re working hard on working out every problem we can. It’s a beta release, so it’ll take some time, though.
I’ll answer as much questions as I can and as soon as I get the answers.
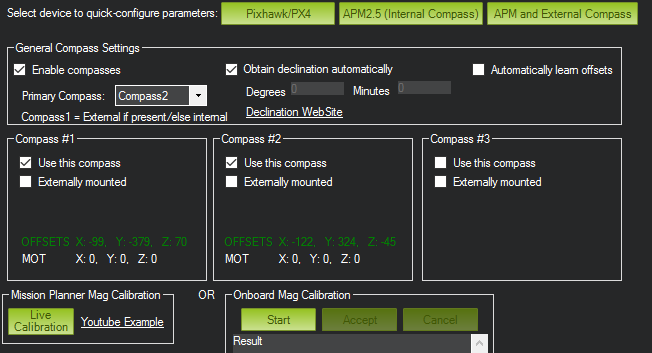
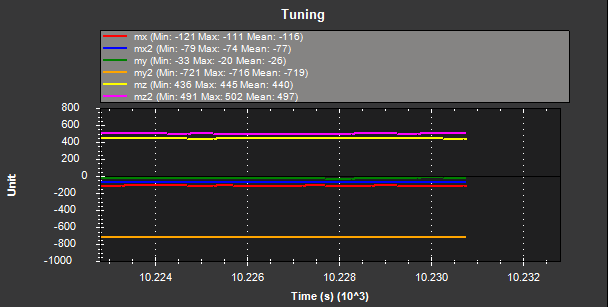
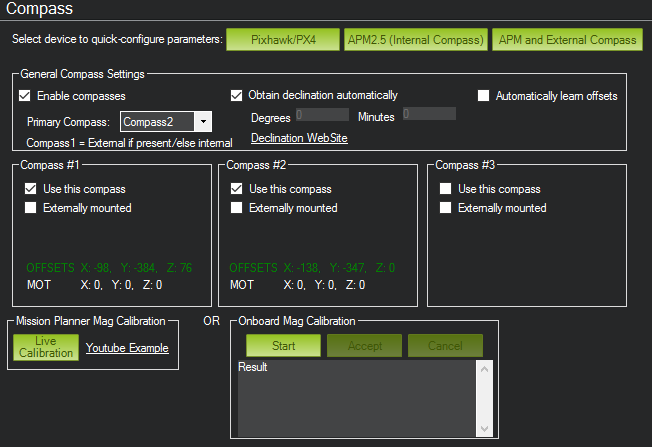
The first bug we’ve been able to crack with your support is a Compass Variance error. Thanks to @Nikker we’ve got the data and I was able to reproduce the issue with Mission Planner, Navio2 and Raspberry Pi 2. The problem as it turns out wasn’t the ArduPilot but Mission Planner! So in order to overcome this very strange “gap” in my and my2 one MUST perform Onboard Mag Calibration rather than Live Calibration. Take a look at these two consequent calibration endeavours:
- Live Calibration
- Onboard Calibration
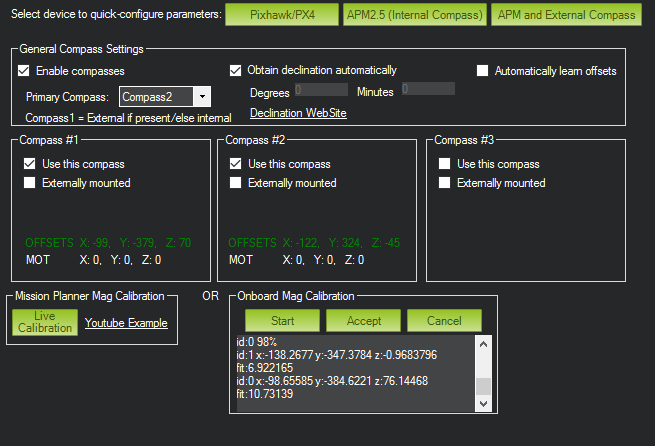
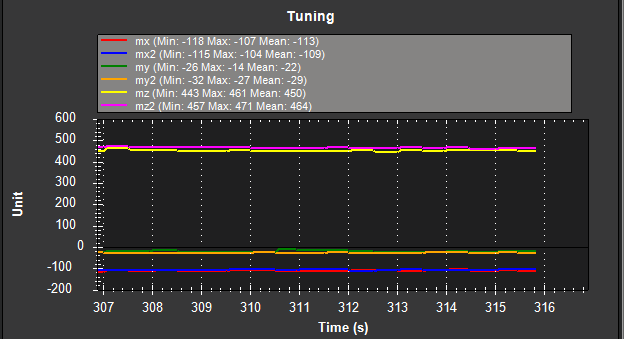
As you can see the problem is gone in the second case. The most confusing part about onboard calibration in Mission Planner is that offset don’t get updated instantly. One needs to switch tabs in order to see the effect:
So I guess a lot of your problems will disappear once you recalibrate your compasses with this newer technique.
We’ll add a docs entry about it and file a bug report for MP’s team.